动态地物仿真目标发生器电控系统
2013-10-10李载峰李俊霖
李载峰, 李俊霖
(中国科学院长春光学精密机械与物理研究所,吉林 长春 130033)
0 引 言
动态地物仿真系统用于完成机载光电侦查平台捕获与动态跟踪精度室内检测,其原理是利用目标发生器模拟待捕获目标,与仿真系统中的其它设备配合模拟出现实目标的运动特性,机载光电侦查平台对目标发生器发出的模拟目标完成捕获和跟踪,并给出实时的方位角α′与俯仰角β′,即通过方位角与俯仰角描绘出模拟目标的空间位置,而目标发生器则同时给出模拟目标的方位角α与俯仰角β作为真值。通过公式计算就可以得到机载平台的跟踪精度[1]。
目标发生器作为动态地物仿真系统的关键设备,用于产生仿真背景下的待捕获模拟目标,并驱动目标按设定的运动轨迹运动,同时,实时输出模拟目标的方位角α与俯仰角β作为理论真值,文中主要介绍目标发生器电控系统设计方案。
1 目标发生器整体设计
目标发生器的设计要求是模拟一个无穷远的待捕获目标,目标的运动特性是沿空间圆周做向心转动的两维运动,并保证光学系统的出射光线始终指向空间坐标系的原点,即被检机载侦测平台光学系统的主点,其空间运动轨迹原理如图1所示。

图1 目标运动特性原理图
基于目标运动特性的需求设计目标发生器整体结构如图2所示。
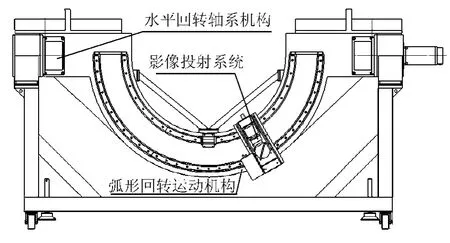
图2 目标发生器组成原理示意图
影像投射系统发射平行光,用于模拟无穷远处待捕获的目标,根据设计要求的目标运动特性,目标发生器的机械结构设计为两自由度的回转运动机构。影像投射系统安装在弧形回转运动机构上,可以沿着弧形导轨做匀速、匀变速圆周运动,而弧形导轨整体围绕水平回转轴系机构相对于地面做圆周运动,两个圆周运动合成的结果就是影像投射系统相对地面做图1所示的运动。
根据目标发生器使用要求,电控系统主要实现驱动电机转动和反馈角度信息的功能,设计中影像投射系统和水平轴系回转均由力矩电机驱动,电控系统通过伺服控制驱动两力矩电机,保持影像投射系统按照设定的轨迹运行,同时,电控系统实时采集影像投射系统空间位置的方位角和俯仰角。
2 电控系统硬件组成
目标发生器电控系统由中央控制器、接口电路、数字采集卡、电机驱动器、圆形光栅角位置传感器、力矩电机等单元组成,系统结构框图如图3所示[2-3]。
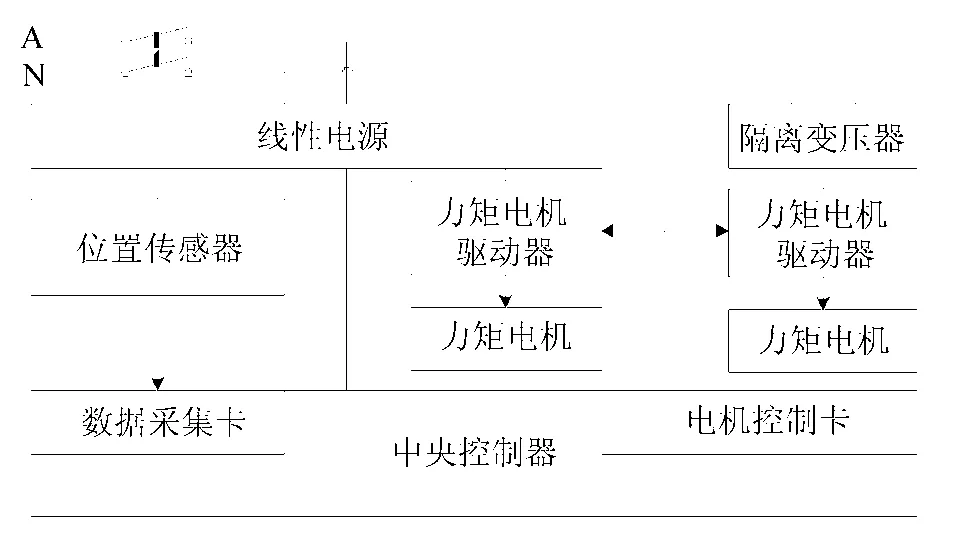
图3 电控系统结构图
电控系统中线性电源和隔离变压器实现电压变换,将220V交流电转换成电控系统所需的各种电压;两个力矩电机驱动器接收电机控制卡的控制信号,并驱动相应的力矩电机带动设备运转;位置传感器采用圆形光栅角位置传感器,传感器采集影像投射系统的方位角和俯仰角,并将角位置信息通过数据采集卡传输至中央控制器;中央控制器是电控系统的关键部件,其组成包括工控机、数据采集卡和电机控制卡,电机控制卡是伺服控制的输出端,输出两个力矩电机的PWM控制信号,数据采集卡接收位置传感器返回的角位置信息,将其传输至工控机完成数据处理,工控机结合系统软件实现电控系统的综合控制功能。
电控系统的设计关键是伺服系统,本设计中伺服系统采用位置速度双回路控制,系统初始状态根据初始参数设置驱动电机,根据位置传感器的返回值计算出位置和速度参数,以位置和速度参数作为伺服系统的输入,进而推算出下一时刻系统输出的PWM控制信号,完成电机驱动。伺服系统控制框图如图4所示[4-6]。

图4 伺服系统控制框图
3 电控系统软件设计
目标发生器电控系统软件主要实现两个功能:一是根据初始设定的参数驱动两个力矩电机实现机构的运动,并通过伺服系统连续驱动力矩电机,使模拟目标最大程度拟合理论轨迹运动;另一功能是采集角位置传感器实时返回的影像投射系统方位角和俯仰角数据,将其作为输入反馈至伺服系统,并将方位角和俯仰角数据存储至数据库,进而在显示器上完成显示,电控系统软件流程如图5所示。

图5 电控系统软件流程图
软件启动后,伺服系统以初始参数设置作为原始输入,结算出输出值并驱动力矩电机工作,机构整体启动。软件查询采集卡是否采集到角位置传感器返回值,没有返回数据,则继续查询;有返回数据,则读取方位角和俯仰角的当前值,将其存储至指定数据库中,并更新显示器的显示值,以返回的位置数据和解算出的速度数据作为新的输入启动伺服系统。伺服系统输出驱动力矩电机实现机构的连续运动,软件继续查询数据采集卡状态,准备接受新的返回数据。
电控系统软件结合高效的伺服驱动系统很好地实现了目标发生器电机控制和数据采集,使影像投射系统能够按照理论运动轨迹完成运动。
4 结 语
动态地物仿真系统目标发生器现阶段已经投入正式使用,可靠、稳定的电控系统有效地保证了影像投射系统的运动特性,从而成功实现了机载光电侦查平台捕获与动态跟踪精度室内检测。
[1]李兴红.基于TMS320F2812的跟踪伺服系统[J].微计算机信息,2007,13:147-151.
[2]张翠哲.步进电机在检测系统中的控制与应用[J].电机与控制应用,2010,9(9):38-40.
[3]王建立.光电经纬仪电视跟踪、捕获快速运动目标技术的研究[D]:[硕士学位论文].长春:中国科学院长春光学精密机械与物理研究所,2002.
[4]赵希梅.交流伺服控制系统的发展现状及研究热点[J].伺服控制,2010,17:14-17.
[5]张勇.经纬仪测试场景仿真系统研究[J].光电工程,2009,3(11):39-42.
[6]梁伟,冯枫,鲍学良,等.角加速度传感器及其应用[J].长春工业大学学报:自然科学版,2012,3(6):311-316.
