CIPS空三加密技术与应用
2013-10-10晏启明程朋根
晏启明, 程朋根
(东华理工大学测绘工程学院,江西南昌 330013)
地理信息是国家重要的战略信息资源,在政府管理决策、信息资源共享、人民生活改善等方面发挥着越来越重要的作用。而航空摄影测量作为其中重要的一环,已经进入到它的第三阶段——数字摄影测量阶段。在数字摄影测量中高精度的数字产品主要取决于对原始影像的空三加密这道工序,空三加密的精度直接关系着后期数字正射影像等产品的质量。由于提供的原始影像数据存在各种各样的问题,如何通过算法进行解决处理的,对于算法解决不了的,实际生产中又是通过哪些生产方案来进行解决的,这些都让基于航空摄影测量的空三加密无论在理论上还是实际生产中都有一定的研究价值。
本文利用某地区的数字航摄相机(Digital Mapping Camera,DMC)影像数据为例,分析吉威公司的集群式影像处理系统(Cluster image processing system,CIPS)系统中的Geoway AAT空三软件进行空三加密的技术思路,并对实际生产过程中遇到的问题提出了处理方法。
1 空中三角测量数据处理流程
航空摄影测量发展到今天,已经全面进入了数字摄影测量阶段,成为主流的作业方式,但是其数学模型仍然是沿用的解析空中三角测量。采用空中三角测量方式获取加密成果比全野外布点大大节省了外业工作量,也提高了整体精度,因此它的应用也越来越广泛和普遍(林君建等,2005)。自1995年出现了自动空中三角测量的摄影测量系统以来,各种不同自动化程度的自动空中三角测量软件系统相继问世,有效解决了空三加密问题。CIPS系统吉威公司开发的集群式影像处理系统,其进行空三加密的流程如图1所示。需要经历数据准备、内定向、相对定向、绝对定向、构建区域网等(赵俊羽,2012)。
2 CIPS中空三关键技术分析
在数字摄影测量中,是以影像自动匹配代替传统人工观测来获取同名像点的。在实际生产中,得到精度最好、比较可靠的同名点,对于相对定向中的航带初始构网,建立整个测区里航片与航片之间,航带与航带之间的连接有着极大的作用。现有的匹配方法主要有特征匹配、灰度匹配以及相位匹配。实际生产中要求匹配算法对仿射变换,视角变化以及噪声能保持一定的稳定性。因此匹配算法可以通过结合灰度匹配与特征匹配来提高匹配精度及可靠性。

图1 CIPS空三流程图Fig.1 The aerial triangulation in CIPS
在CIPS的空三处理软件Geoway AAT中,重点步骤在于对数据进行初始构网(即建立航带及航带间相片的位置关系),初始构网的主要步骤如图2所示。
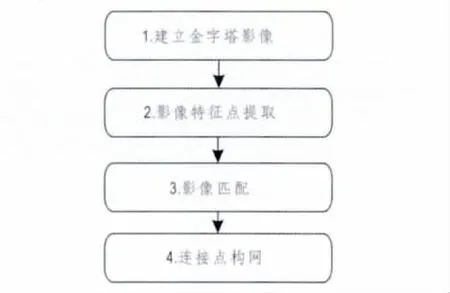
图2 初始构网主要步骤Fig.2 Main steps of initial network configuration
(1)建立影像金字塔。将所有的航片数据生成为金字塔影像,其基本思想是将原始图像分解成许多不同空间分辨率的子图像,高分辨率(尺寸较大)的图像放在下层,低分辨率(尺寸较小)的图像放在上层,形成一个金字塔形状的影像图序列(Atallah,2001)。
(2)影像特征点提取。影像特征点提取是使用计算机进行视觉和图像处理中的一个概念。它指的是使用计算机及相关软件提取图像中所包含的信息,决定每个图像的点是否属于同一个特征。已有的影像特征点提取算法有Moravec算子、Forstner算子、SUSAN算子、Harris算子和SIFT算子等,运用较多的有Harris算子和SIFT算子。SIFT匹配算法得出的算子对影像平移、旋转、缩放、亮度变化等保持不变性,但存在特征点精度不高、特征点分布不均匀、运算时间长、特征点不明显的角点等问题,而Harris算子对影像的平移、旋转以噪声都具有较强的稳定性,但不足之处是不具有尺度不变性,其阈值取决于影像的纹理尺寸等信息。因此,在特征点提取过程中利用Harris角点和SIFT特征点之间互补性提高了其对旋转,尺度等变化的稳定性(Harris et al.,1988;谢萍等,2012)。
(3)影像匹配。影像匹配分为两个方面,一是灰度匹配,一般在影像上搜索同名点是一个二维搜索的过程,但当完成相对定向后就可以利用同名核线,将二维搜索转化为一维搜索,从而极大地提高运算速度。灰度匹配一般分为二维相关和一维相关(江万寿等,2003)。
二维影像相关时,先在左影像上确定一个目标点,以此目标点为中心选取m×n个像素的灰度阵列作为一个目标区,为了在右影像进行搜索同名点,需要估算出该同名点可能存在的范围。建立一个k×l(k>m,l>n)个像素的灰度阵列作为搜索区,依次在搜索区的不同位置选出m×n个像素灰度阵列作为搜索窗口,计算其与目标区的相似性测度(Shamir,2007)。
值得注意的是灰度匹配存在一定的局限性。当两幅影像旋偏角过大时,灰度匹配将失去相关性,不能正确得到两幅影像的匹配点位置。
第二个是特征匹配,运用第一步生成的金字塔影像进行相关匹配,先通过降低了分辨率的数字影像,在大图像范围内进行初相关匹配,找到同名点的粗略范围,然后作为预测值,逐渐采用生成的较高分辨率影像,在逐渐变小的的搜索区中进行相关匹配,最后用原始分辨率影像进行点相关匹配。
该匹配方法无需对原图像进行复杂的分析,只需要通过该算法的多次迭代,就能生成任意大小且与目标图像基本相似的图像,保存了原始影像的主要结构信息,过滤了细节和噪声信息,匹配的可靠性较高。这在摄影测量中对于匹配的精度、正确率、速度、鲁棒性和抗干扰性起到很大的关键作用(全斌等,2010)。
CIPS同时采用了这两种匹配方式,提高了匹配的准确性。
(4)连接点构网。影像匹配完毕得到的同名点集合进行合并,构建同名三角网,建立航带及航带间相片的位置关系,完成初始构网。
初始构网完成后,所得到的测区网型正确与否直接关系下一步操作流程还是否需要进行下去,如果构网完成的网型出现问题,那么必须要返回初始构网这个环节进行相关操作,然后重新构网。因为相对定向中的初始构网,已经决定了相片的位置,如果在构网时航带与航带或者航片与航片之间匹配错误,位置关系出现了严重的偏差,那么后面一系列步骤的将会在一个错误的测区航带网型上进行处理操作,那将毫无意义。
3 试验与处理
使用某地区的DMC影像数据基于吉威公司CIPS系统中的Geoway AAT软件进行空三处理。影像数据所含地形比较复杂,包括海域、高山,为多时相数据(时相差异较大:数据拍摄时间跨越大,地物变化较大,季节状况变化明显);飞行航向为东西向,且只有GPS数据而没有IMU数据。
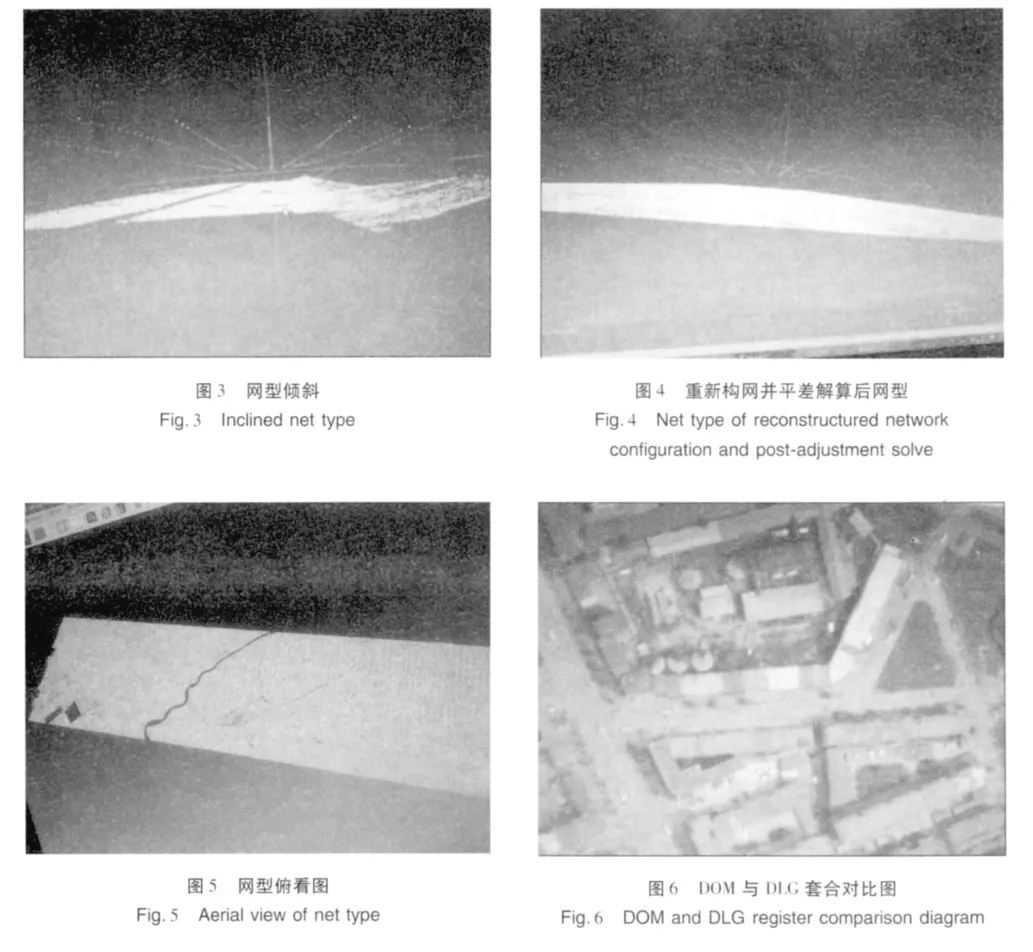
对试验数据经过初始构网匹配后,一些航带或者航带内部分照片无法通过匹配正确构网。图3为匹配完成后测区的点云成果,结果发现部分航带存在网形下陷,上浮或者倾斜的情况,此时中误差为 78.1 μ。
针对航片未入网和网型错乱的情况,必须通过在与相邻航片(既已入网航带航片)之间进行刺同名点,使未入网相片入网或者使错乱的网型调整至正常。经过分析和试验,发现在航带首尾刺点只能保证被刺点航片及其周围部分航片能与周围航带进行较好的连接匹配,但不能使所有出现错误匹配的航片调整至正常网型。通过反复试验发现,只有通过隔片刺点(10~20张航片视具体情况确定),特别是该测区中有水域、高山或者两条航带间时相相差比较大的航片,需要注意所刺点的准确性和数量(5~6个)。再进行初始构网匹配(匹配时会根据航片上刺上的相关同名点重新进行匹配),通过光束法平差剔除一些大的粗差点,进行反复迭代平差计算调整网型直到网型平整(图4,图5),测区网型整体已经在一个水平面上,上浮下陷或者倾斜的情况已经被解决,此时的中差为3.78 μ。
根据该生产项目要求,对试验区平差中匹配出的像点要求最大残差不超过一个像素(12 μ),中误差控制在1/3个像素(4 μ)左右,本项目的最终处理结果符合要求。
平差解算达到该要求后,使用解算出的空三成果进行后续生产操作,最终生成DOM成果图,与提供的DLG道路线划画进行套合对比,成果精度符合要求,图6为部分截图效果。
4 结语
空中三角测量是生产国家应急救灾、国土资源监察、数字城市建设和新农村测绘等方面所需要的数字产品之前不可或缺的一道工序。采用数字化测绘技术进行测量工作,能在较短的时间内完成地籍图测绘任务,与传统的方法相比,具有工作效率高、人力物力消耗少、精度高、便于修改等优点。
试验中发现,文中提及的影像匹配算法对于影像中多为平坦区域(无明显特征地物)的话,例如水域和田地,匹配出的连接点较少、甚至没有,不利于航带间连接,导致部分航片无法匹配构网,影响测区外方位元素和加密点的解算。本文提出的隔片刺点思路有效解决了此类问题,同时节省了时间。
江万寿,郑顺义,张祖勋等.2003.航空影像特征匹配研究[J].武汉大学学报:信息科学版,28(5):510-513.
林君建,苍桂华.2005.摄影测量学[M].北京:国防工业出版社.
全斌,刘仁洋.2010.金字塔影像结构在影像匹配中的应用[J].测绘通报,(3):10-12.
谢萍,邹峥嵘,肖奇.2012.基于Harris角点和SIFT特征的近景影像匹配[J].测绘科学,(4):1009-2307.
赵俊羽.2012.解析空中三角测量的作业流程研究[J].东华理工大学学报:自然科学版,33(2):178-182.
Atallah M J.2001.Faster Image Template Matching in the Sum of the Absolute Value of Differences Measure[J].IEEE Transactions on Image Processing,10(4):659-663.
Harris C J,StePhens M.1988.A combined Corner and Edge Detector[C].Proceedings of the Fourth Alvey Vision Conference:147-151.
Shamir L.2007.A Proposed Stereo Matching Algorithm for Noisy Sets of Color Images[J].Computers & Geosciences,33(8):1052-1063.
