玉米穴播穴灌机水分传感器驱动机构设计
2013-10-09杨术明李茂强杨树川马伏龙
杨术明,李茂强,杨树川,马伏龙
(宁夏大学机械工程学院,宁夏银川 750021)
春旱在中国非常普遍,尤其是水资源匮乏的西北地区,严重影响农作物的适时播种,穴播穴灌是在穴播的同时进行穴灌,可在一定程度上减轻春旱对适时播种的威胁.基于土壤水分含量的变量施水措施则可根据土壤水分含量大小进行按需施水,在抗旱的同时进一步节水,从而提高水分的利用效率.在穴播穴灌机上配置变量施水控制系统,在工作过程中根据土壤水分含量大小有效地调控施水量,但如何在工作时实时采集土壤水分含量信号并提供给控制系统成为亟待解决的问题.本文旨在设计一种水分传感器驱动机构,满足玉米穴播穴灌机对水分传感器在工作过程中的土壤测量深度和零速要求,在机具工作的同时能够可靠地驱动水分传感器完成入土和出土动作,有效解决穴播穴灌机工作时土壤水分含量信号难以实时采集的问题.
1 水分传感器驱动机构的设计
1.1 玉米穴播穴灌机的结构
玉米穴播穴灌机是一种可根据田间的土壤水分含量自动改变施水量的精密穴施水穴播种机,主要由行走轮、开沟器、排种机构、施水机构、覆土机构、覆膜机构等组成,其三维模型如图1所示.
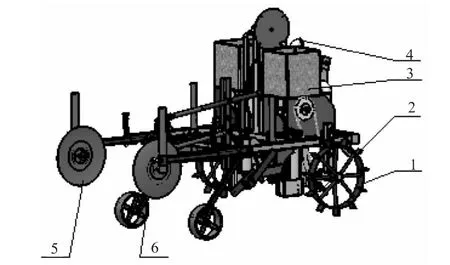
图1 玉米穴播穴灌机Fig.1 Corn irrigating hill-seeder

图2 水分传感器驱动机构Fig.2 Soil moisture sensor drive mechanism
1.2 水分传感器驱动机构的设计
水分传感器驱动机构驱动水分传感器周期性测量土壤水分含量,主要由地轮、传动系统、机架、支架、六杆机构等组成.水分传感器驱动机构通过螺栓固定在玉米穴播穴灌机机架上,传动链条将来自地轮的动力传至驱动盘,驱动盘将动力传至六杆机构,六杆机构驱动水分传感器周期性与土壤接触,传感器将测得的土壤水分含量信号传至变量施水控制系统,其三维模型如图2所示.
2 水分传感器针尖的运动分析
水分传感器的测量电极由3根钢针组成,为了保证土壤水分含量测试的准确性,测量时需要传感器针尖具有一定的入土深度,同时也应满足零速要求,即在钢针入土后,在水平方向中存在绝对速度为零的时刻,为满足以上要求,需对其进行运动分析.
2.1 六杆机构的纵向位移分析
水分传感器安装于六杆机构的平行四边形机构上,安装位置如图3所示.图3中,驱动盘由链传动机构驱动,通过六杆机构中的平行四边形机构往复运动实现周期性测量土壤水分含量.
玉米穴播穴灌机工作时前进速度为1 339mm/s,经计算驱动盘的转速为150.23r/min.以三维模型为基础,利用Solidworks motion对六杆机构进行运动学分析,水分传感器针尖相对于支架的相对位移如图4所示.
由图4可知,传感器针尖相对于支架的相对位移为598~780mm,该位移满足玉米穴播穴灌机工作状态下传感器测量土壤水分含量的要求.

图3 六杆机构Fig.3 Six-bar linkage

图4 传感器针尖相对于支架的相对位移Fig.4 Relative displacement y of Soil Moisture sensor pinpoint
2.2 水分传感器针尖的零速分析
为减小水分传感器与土壤间摩擦阻力,有效保证水分传感器装置的使用寿命,水分传感器针尖的水平方向速度应满足零速要求,即要求传感器针尖在测量时绝对水平速度为零.
2.2.1 传感器针尖水平速度数学模型的建立
为对传感器针尖在运动过程中水平速度做出定量分析,建立其数学模型.在六杆机构的运动简图上建立直角坐标系,如图5所示.从图5可看出,各杆件构成了由杆矢量组成的2个封闭矢量多边形,即ABCDA和DEFGD.
对于封闭多边形ABCDA,建立封闭矢量方程,得式(1).其各构件的长度和原动件的运动规律,即θ1为已知,而θ4=故此矢量方程只有方位角θ2及θ32个未知量,方程可解.

式中分别为杆AB,BC,DC及AD的杆矢量;θ1,θ2,θ3,θ4分别为杆AB,BC,DC及AD与x轴在逆时针方向的夹角.
对于封闭多边形DEFGD,其各构件的长度和原动件的运动规律,即θ5为已知,而θ8=,故此矢量方程可求得2个未知方位角θ6及θ7.在DEFGD这个封闭矢量多边形中,其矢量之和等于零,即
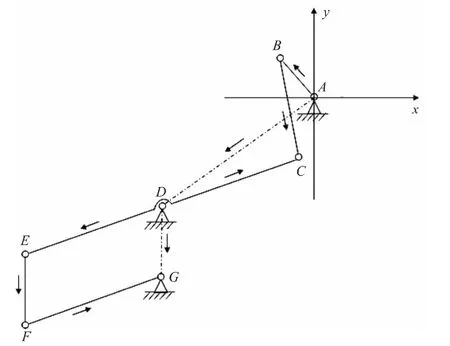
图5 六杆机构运动简图Fig.5 Kinematic sketch of six-bar linkage

式中分别为杆DE,EF,GF及DG的杆矢量;θ5,θ6,θ7,θ8分别为杆DE,EF,GF及DG与x轴在逆时针方向的夹角.
设连杆EF上任一点的位置矢量为,其中的模为207.9mm的模为41.48mm,M点在坐标系Axy中的绝对位置矢量为则

即

求解方程(1),(2),(4)得式(5)和式(6).


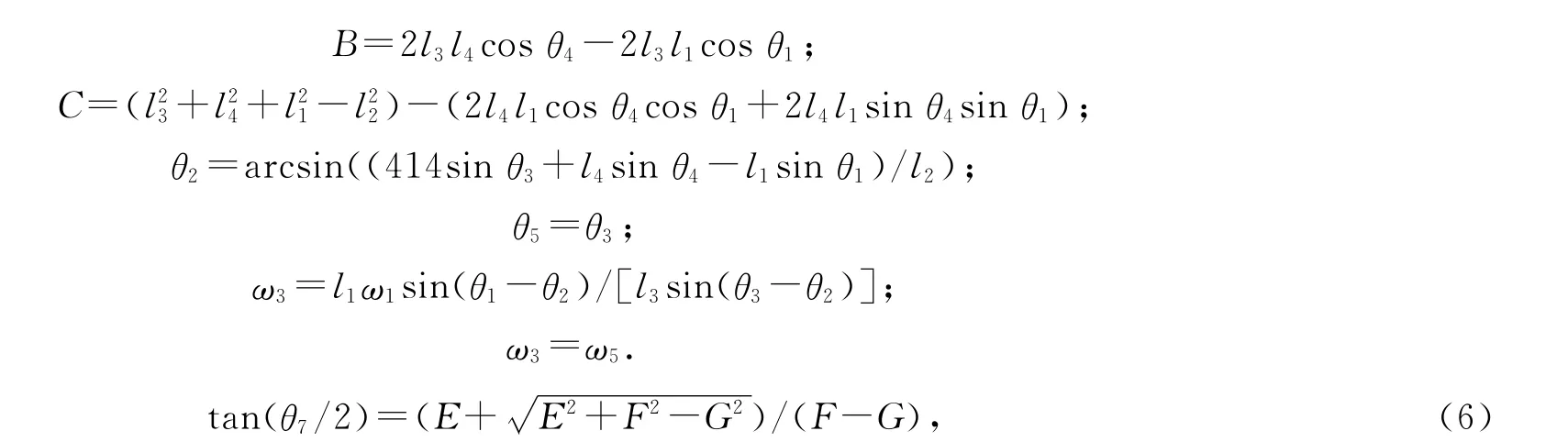
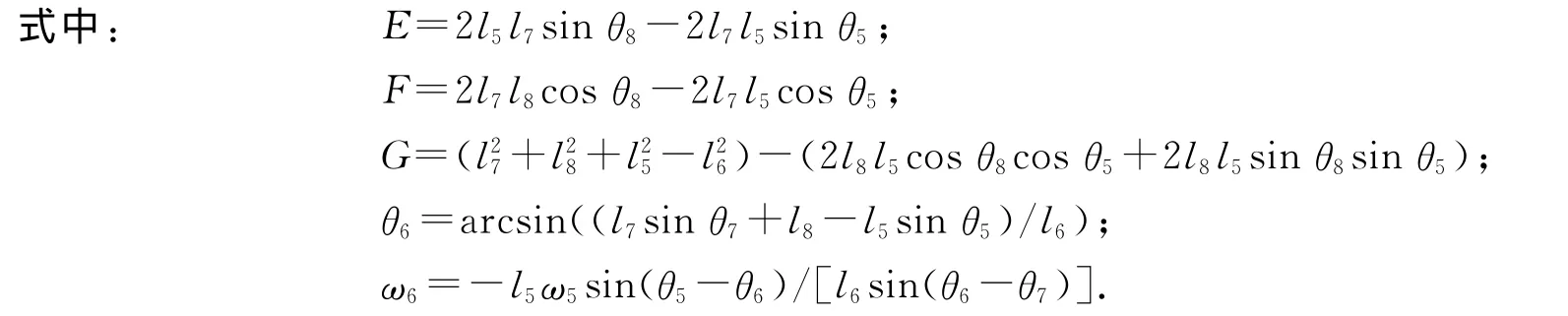
式(4)对时间t求一次导数,并经变换整理可得v→矢量表达式,即

其中式(7)中实部为没考虑机具平动时的针尖水平速度,虚部为没考虑机具平动时的针尖纵向速度.因此,考虑机具平动时的传感器针尖的水平速度为

2.2.2 零速分析
根据零速要求,令式(8)所示的速度为零,通过Matlab软件可得水平速度为零时的转速与时间的关系图,如图6所示.由图6可知,存在使传感器针尖水平速度为零的转速,即存在使传感器针尖满足零速要求的转速,而前期驱动盘设计转速为150.23r/min,不能满足零速要求.
2.2.3 零速要求的最小转速优化
前期驱动盘设计转速150.23r/min因过小而不满足零速要求,而过高的驱动盘转速会导致严重的振动问题,因此最优的转速应该是满足零速要求的最小转速值,即满足式(8)所示水平速度等于零的最小转速值.为确定满足零速要求下的最小转速值,建立优化问题的数学模型.目标函数

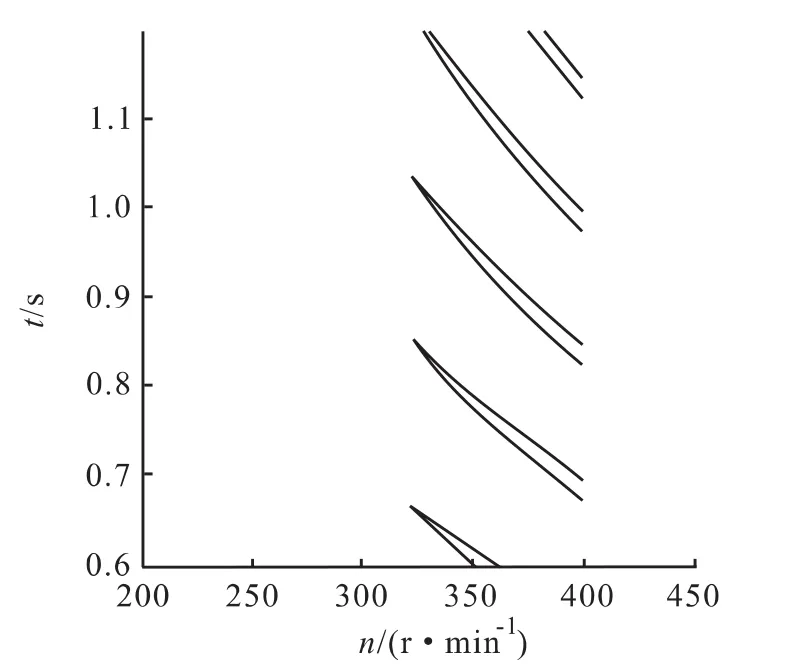
图6 速度为零时的转速时间关系Fig.6 Zero-speed relation schema between rotation rate and time
式中n,ω分别为驱动盘的转速和角速度.
设计变量X:

约束条件:

对数学模型进行优化求解可知,当水分传感器针尖的最小水平方向速度为零时,驱动盘的转速为321r/min,即满足零速要求的最小转速为321r/min.
利用Matlab软件生成水分传感器针尖的水平速度图像,如图7所示,其中图7a为优化前的水平速度图像,图7b为优化后的水平速度图像.
对比优化前后的水平速度图像发现,驱动盘的转速为321r/min时水平速度的最小值明显减小,且满足零速要求.

图7 传感器针尖平动速度的图像Fig.7 Horizontal velocity image of Soil Moisture sensor pinpoint
由Solidworks motion运动学分析得到水分传感器针尖轨迹,如图8所示,其中图8a为优化前的传感器针尖运动轨迹,图8b为优化后的传感器针尖运动轨迹.

图8 传感器针尖的运动轨迹Fig.8 Motion trail of Soil Moisture sensor pinpoint
对比优化前后传感器针尖的运动轨迹发现,水分传感器针尖从土壤底端离开土壤表层时传感器针尖轨迹切线方向垂直向上,说明其在水平方向上速度为零,满足了零速要求.
3 结论
理论分析和仿真结果表明,优化后的水分传感器驱动机构,既能满足土壤水分含量测试的深度要求,又能满足水分传感器针尖零速要求.研究结果为玉米穴播穴灌机水分传感器驱动机构结构及运动参数的设计提供了理论依据.
[1] 杨青,庞树杰,李勇军.基于GPS和GIS的变量施水控制系统设计[J].农业机械学报,2006,37(12):126-129.YANG Qing,PANG Shujie,LI Yongjun.Design of variable rate control system of water application based on GPS and GIS[J].Transactions of the Chinese Society for Agricultural Machinery,2006,37(12):126-129.
[2] 杨术明,杨树川,熊伟.土壤水分测量仪的数字滤波设计与实现[J].河北大学学报:自然科学版,2010,30(3):319-322.YANG Shuming,YANG Shuchuan,XIONG Wei.Design and realization of digital filter for soil moisture meter[J].Journal of Hebei University:Natural Science Edition,2010,30(3):319-322.
[3] 杨术明,杨青,杨成海,等.变量穴施水穴播机设计[J].农业机械学报,2008,39(3):46-48.YANG Shuming,YANG Qing,YANG Chenghai,et al.Design of a variable rate irrigating hill-seeder[J].Transactions of the Chinese Society for Agricultural Machinery,2008,39(3):46-48.
[4] 张志娟,水小平.柔性多体系统碰撞动力学研究进展[J].河北大学学报:自然科学版,2004,24(2):191-194.ZHANG Zhijuan,SHUI Xiaoping.Review on the impact dynamic research of flexible multibody systems[J].Journal of Hebei University:Natural Science Edition,2004,24(2):191-194.
[5] 田晓,佘航,方立德.基于MATLAB的导轨直线度数据处理以及界面设计[J].河北大学学报:自然科学版,2011,31(1):98-102.TIAN Xiao,SHE Hang,FANG Lide.Design of data processing and graphic interface for straightness tolerance based on MATLAB[J].Journal of Hebei University:Natural Science Edition,2011,31(1):98-102.
[6] 李滨城,徐超.机械原理Matlab辅助分析[M].北京:化学工业出版社,2011.
[7] 徐春雷,潘宏侠,李冉,等.基于Matlab的平面连杆机构仿真软件的研究[J].机械设计与制造,2012,12:94-96.XU Chunlei,PAN Hongxia,LI Ran,et al.Research of simulation software of planar linkage based on Matlab[J].Machinery Design &Manufacture,2012,12:94-96.
[8] 陈超祥,胡其登.Solid Works Motion运动仿真教程[M].北京:机械工业出版社,2012.
[9] 孙桓,陈作模,葛文杰.机械原理[M].北京:高等教育出版社,2006.
[10] 周凌.基于Matlab的四杆机构的运动学动力学仿真[J].佳木斯教育学院学报,2011,109(11):147-149.ZHOU Ling.Based on the Matlab four-bar mechanism of the kinematics dynamics simulation[J].Journal of Jiamusi Education Institute,2011,109(11):147-149.
[11] 余海宁.铰链四杆机构的计算机辅助设计及运动仿真[J].现代机械,2007,11:33-34.YU Haining.Computer aided design and kinematics simulation for four bar linkage mechanism[J].Modern Machinery,2007,11:33-34.
[12] 雷经发,扈静,魏涛.基于MATLAB的平面四杆机构运动学分析[J].机械工程,2009,9:76-78.LEI Jingfa,HU Jing,WEI Tao.Kinematic analysis of the planar four bar linkage mechanism based on MATLAB[J].Journal of Mechanical Engineer,2009,9:76-78.
