单电流检测配网静止同步补偿器的改进控制策略
2013-10-09徐在德高岩涛
刘 骥,徐在德,高岩涛,黄 玲
(1.哈尔滨理工大学 电气与电子工程学院,黑龙江 哈尔滨 150080;2.大庆电业局,黑龙江 大庆 163464)
0 引言
静止同步补偿器(STATCOM)是一种并联型无功补偿的柔性交流输电系统(FACTS)装置,它能够发出或吸收无功功率,用于配电网的STATCOM通常又称为配电网静止同步补偿器(DSTATCOM),其可以对电网谐波以及无功进行补偿,实现对电网的净化,因而DSTATCOM已经成为解决电力系统电能质量问题的重要装置。
国内的配电网静止同步补偿器的电流检测算法主要是采用 ip-iq法[1-2]、d-q 矢量变换[3-5]等控制策略,但都要检测负载和补偿电流,精确计算补偿量。近年来,国内也开始研究电源电流的直接控制策略,虽然给出了这种控制方法的基本原理,但都没有给出该方法的详细理论分析[6-7],尤其是在PI参数选择的方法原则以及理论依据方面尚无文献报道。
目前大多DSTATCOM都要进行谐波和无功的检测,并以此作为补偿的依据进行实时补偿,直流侧电容电压稳定性的控制目前大多采用PI控制方式[8-10],传统PI控制的动态性能差,响应速度较慢,超调量较大,暂态过程中容易击穿电容。
针对上述情况,本文提出更实用的控制方式,不需要对谐波和无功进行检测,采用直接控制电源电流的方式,硬件简单化,提高实时性,降低成本。同时为了克服传统PI的缺点,本文采用了自适应模糊控制器来控制直流侧电容电压,具有较强的鲁棒性和适应性。自适应模糊PI控制器实现了PI参数的最优调整,进一步加强系统对不确定因素的适应性,它不依赖于系统精确的数学模型,具有很强的适应性。本文通过仿真和实验证明采用无谐波和无功检测单元的直接控制电源电流的方式,同样能达到理想的补偿效果。对PI控制和自适应模糊PI控制的直流侧电容电压进行了动态的对比,结果表明采用自适应模糊PI控制器,系统的超调更小,响应速度更快。
1 直接控制电流的DSTATCOM原理
与传统的DSTATCOM系统相比,本文提出的DSTATCOM控制方案省去了复杂的谐波和无功的检测单元以及相应的硬件电路。其主回路原理图如图1所示。
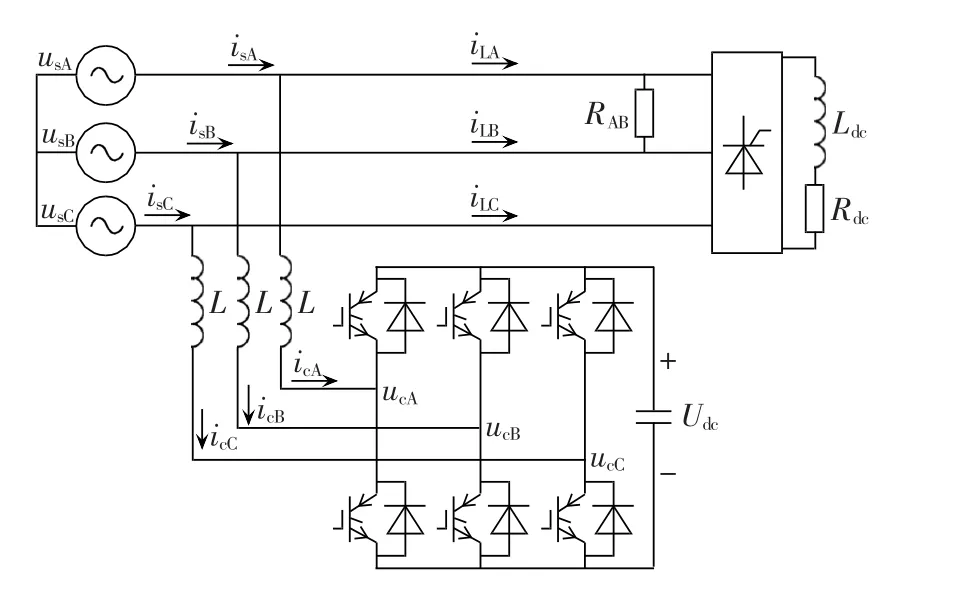
图1 DSTATCOM主回路原理图Fig.1 Main circuit of DSTATCOM
由图1可以知道,DSTATCOM的主回路主要是由逆变桥、直流侧电容、耦合电感组成。目前大多数DSTATCOM都需要检测谐波和无功电流,将检测的结果作为补偿的依据,然后通过DSTATCOM提供补偿电流ic,消除流入电网的无功和谐波电流[11-13]。
DSTATCOM控制系统结构图如图2所示。其中,采用直接控制电源电流的DSTATCOM,补偿电流设定值i*s的幅值Im是由直流侧电容电压设定值与实际值之差ΔUC通过自适应模糊PI控制器调节后获得的,然后将自适应模糊PI控制器输出Im分别与系统各相电源同相位的单位正弦信号相乘作为补偿电流的参考瞬时值i*s,i*s和电源电流实际值is的差值Δis作为滞环比较的输入信号。

图2 DSTATCOM控制系统结构图Fig.2 Structure of DSTATCOM control system
2 自适应模糊PI控制
DSTATCOM电容电压的稳定性直接决定了DSTATCOM的补偿效果,因而直流侧电容电压的稳定性就显得尤为重要,而传统采用的是普通PI调节来控制电容电压的稳定,响应速度较慢,动态性能差[14]。
自适应模糊PI控制如图3所示。其系统是以常规PI控制为基础,采用模糊推理思想,将误差e和误差变化率ec作为模糊控制器的2个输入量,通过模糊控制器输出变量,利用模糊规则对PI参数进行实时修正,从而达到 PI参数的最优[15-16]。
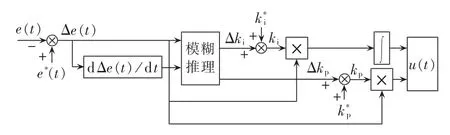
图3 自适应模糊PI控制结构Fig.3 Structure of adaptive fuzzy PI controller
根据模糊控制原理对2个参数进行实时修改,以满足不同e和ec对控制参数的不同要求,而使对象有良好的动、静态性能。首先根据经验值设定k*p、k*i的值,其次通过模糊推理得到修正值Δkp、Δki,然后通过经验值和修正值得到最优kp和ki。
设

根据图3实现了对PI参数的优化,PI的控制算式如下:

图4为自适应模糊控制仿真图。其中,K6、K7为式(1)中的 ki、kp,为经验值确定的 PI参数;K4、K5 为模糊推理得到的修正值Δkp、Δki,从而实时修正PI参数;K1、K2为2个输入变量的调节系数,可以根据输入量范围的变化,直接调节K1、K2的大小,这样不需要在模糊模块根据输入变量的范围重新确定e和ec的取值范围,提高了系统的适应性。

图4 Simulink自适应模糊控制仿真图Fig.4 Simulink-based simulation of adaptive fuzzy control
3 三相不平衡时DSTATCOM
电力系统正常不平衡是由系统三相负载不对称引起的,由此产生的不平衡电流对系统的影响很大,而传统的瞬时对称分量变化是将任意一组不对称的三相分量分解为3组对称的相量。对于三相不对称性负载,根据瞬时对称分量分解,可分解为各次电流的正序、负序和零序对称分量。针对传统方法的复杂性,本文采用直接控制电源电流方式的DSTATCOM对三相三线系统在不平衡情况下进行了补偿。由于本系统采用的是三相三线结构,在负载不平衡时,零序电流无法通过,因此在分析的时候忽略零序电流对系统的影响。
直接控制电源电流方式不需要检测无功电流,因为在DSTATCOM进行滤波和补偿无功时,直流侧电容和电网电流存在能量的交换。电容电压和电容电流具有下面的动态关系:

根据能量的平衡,直流侧电容充放电过程都是基波电流引起的,由此可知,直流侧电容的有功电流设为i(t),通过自适应模糊PI调节后得到有功电流值Im。

系统电流和直流侧电压形成了闭环控制,这样通过PI控制后可以得到较准确的有功参考电流i*s,按图2原理得到补偿无功电流参考值i*q。

4 仿真与实验
根据上述分析,对采用直接控制电源电流方式的DSTATCOM在MATLAB/Simulink环境下进行了仿真,其中仿真系统的基本参数为:系统电源电压为us=220 V,直流侧电容C=3300 μF,电容电压的设定值为UCref=750 V,滞环比较器的环宽为1 A,负载侧Rdc=10 Ω,Ldc=10 mH,Rab=5 Ω。
系统在 t=0.05 s时投入 DSTATCOM,图 5(a)为投入前A相的电压、电流曲线,图5(b)为投入后A相的电压、电流波形。通过对比可知,采用直接控制电源电流方式,谐波和无功补偿效果非常理想。

图5 电源电流控制的DSTATCOM的A相补偿效果Fig.5 Compensation waveforms of DSTATCOM based on source current control for phase A
图6(a)为采用普通PI控制的DSTATCOM A相电流的过渡曲线,图6(b)为采用自适应模糊PI控制的DSTATCOM A相电流的过渡曲线。由曲线对比可知,采用自适应模糊PI控制电流大概需要4个工频周期可以达到稳定,采用PI控制电流大概需要8个工频周期才可以达到稳定。
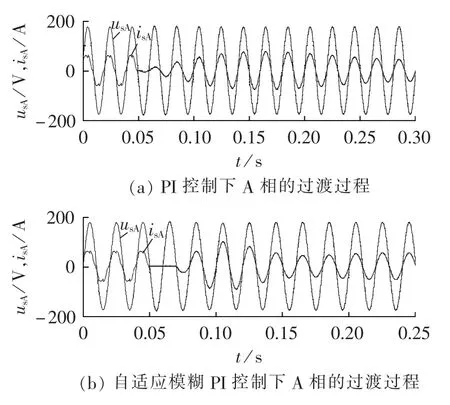
图6 电源电流控制的DSTATCOM的A相过渡过程Fig.6 Transient waveforms of DSTATCOM based on source current control for phase A
图7(a)为投入DSTATCOM前的三相电流曲线,可明显地看出,三相存在严重的不平衡现象且含有大量谐波;图7(b)为投入DSTATCOM后的波形,通过对比可知,采用直接控制电源电流方式的DSTATCOM可以使三相系统电流实现平衡,并且可以补偿无功,滤除谐波;图7(c)为DSTATCOM提供的补偿电流。
图8(a)、(b)为投入 DSTATCOM 后 2 种控制方式下的A相电流过渡过程曲线,图8(c)为将1.0 mH耦合电感减小为0.4 mH后的三相过渡过程波形,可见暂态响应时间明显缩短,可以控制在1个周期内。
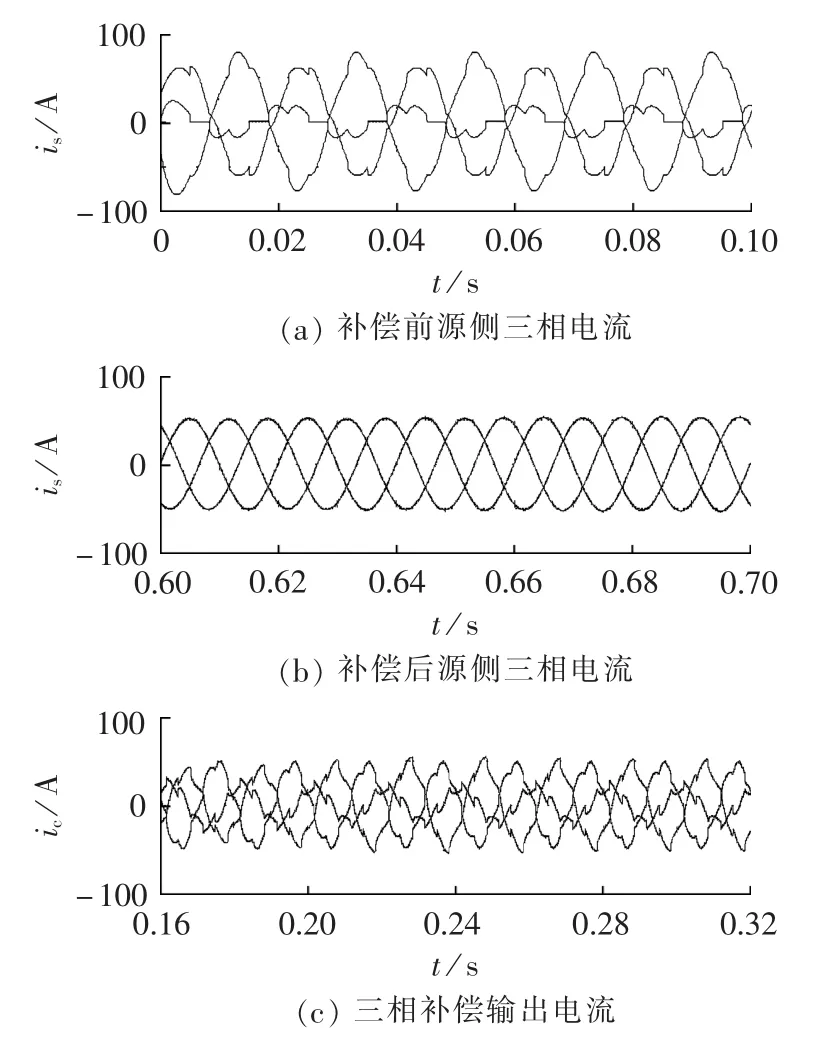
图7 电源电流控制的DSTATCOM三相补偿效果Fig.7 Three-phase compensation waveforms of DSTATCOM based on source current control
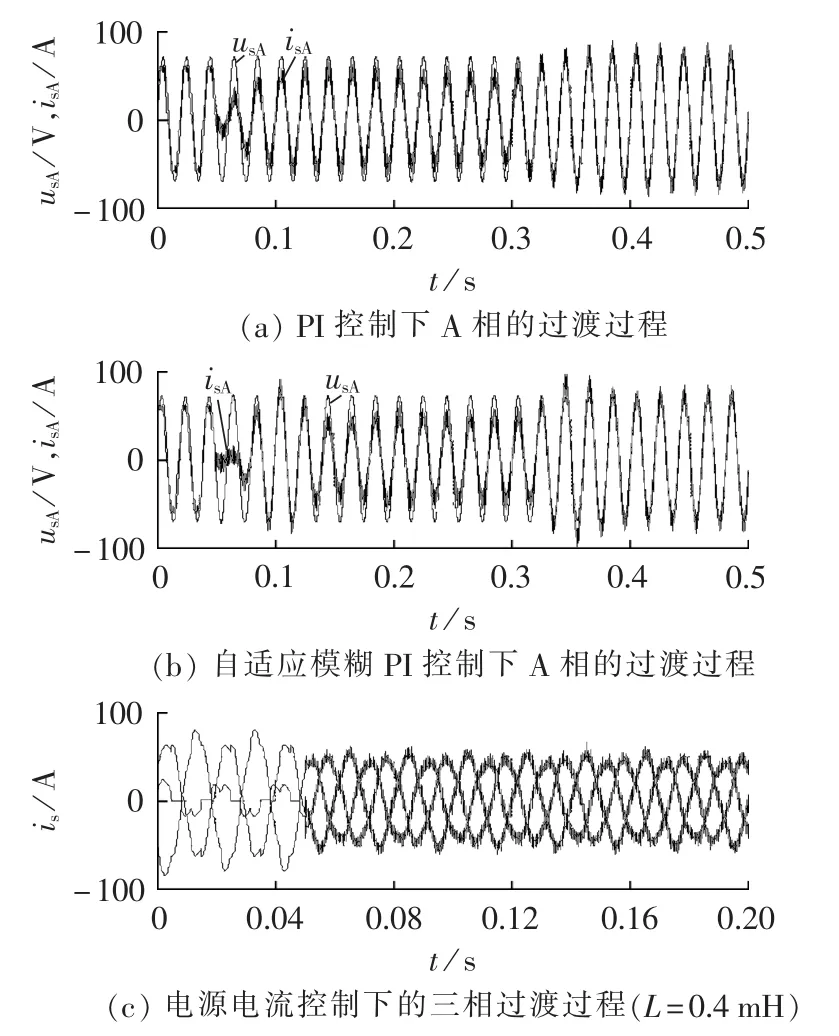
图8 电源电流控制的DSTATCOM的过渡过程Fig.8 Three-phase transient waveforms of DSTATCOM based on source current control
由图2的DSTATCOM控制系统结构图可知,投入的一瞬间,电容电压设定值和实际值之间的差值ΔUC为0,所以经过PI调节后的电流Im也为0,此时系统电流的设定值i*s也就为0,由式(6)可以明显看出,此时滞环比较的输入为系统实际电流is自身作差,所以造成系统电流瞬间为0的现象,如图8(b)0.05 s投入起始时刻的波形所示;但是伴随着电容的放电,PI调节后的电流Im逐渐增加,此时i*s也逐渐增加,从而使系统电流逐渐增加,最后趋于稳定。
图9为直流侧电容电压的波动曲线。可知,采用普通PI调节,系统稳定到额定电压值750 V大概需要0.2 s;采用自适应模糊PI调节,系统稳定到额定电压值750 V大概需要0.1 s,并且基本上没有超调,电压波动不大,对比可知采用自适应模糊PI控制,系统的响应速度加快。

图9 2种控制方式下初始时刻电容电压的过渡过程Fig.9 Transition process of initial capacitor voltage under two control modes
为了验证所提控制方案的可行性,按图1结构原理开发了一套针对此种控制方案的DSTATCOM实验样机,对其无功补偿效果进行验证。实验装置:系统直流侧电容C=3300μF,电容电压的设定值为UCref=120 V,负载 L=13.8 mH,R=5.6 Ω,PI设定参数为 kp=0.2,ki=5.0,分别采用FLUKE 434电能质量分析仪和TDS3014B示波器进行电压、电流测量,结果如图10、图11所示。

图10 电源电流控制的DSTATCOM的A相补偿试验结果Fig.10 Test results of DSTATCOM with source current control for phase A
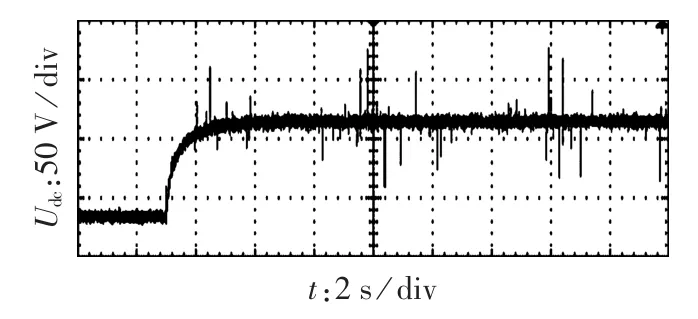
图11 直流侧电容电压测试曲线Fig.11 Test curve of DC side capacitor voltage
由图10(a)和(b)的对比可知该方法在实际实验应用中也是可行的,完全满足要求。通过功率因数补偿前后的对比可知,补偿前功率因数为0.8,含有较多的无功,补偿后功率因数为0.99,补偿了无功,并且基本没有谐波产生。
图11为投入DSTATCOM后直流侧电容电压的过渡过程。可知,系统经过约0.8 s达到稳态,之后电容电压一直比较稳定。
5 结语
针对传统DSTATCOM复杂的谐波和无功检测单元,本文采用了结构简单的直接控制电源电流的DSTATCOM,通过仿真与实验验证表明采用不检测无功和谐波电流、单独控制电源侧电流的控制模式同样能达到滤除谐波、补偿无功的目的,而且控制软件硬件实现更简单;通过对传统PI控制和自适应模糊PI控制的直流侧电容电压进行了动态对比,结果表明采用自适应模糊PI控制器,系统响应速度加快,鲁棒性强,特别是在三相不平衡的条件下,可以较准确地对三相进行补偿,使三相达到平衡状态,并且使系统迅速达到稳定状态。
通过实验样机实验验证和仿真分析,同时证明采用该控制策略后,DSTATCOM具有较好的动态和稳态性能。
