基于ARM太阳能光伏板自动跟踪系统的设计
2013-09-25袁志远
朱 宇,袁志远
(西安科技大学 计算机科学与技术学院,陕西 西安 710054)
随着社会的发展,社会对新能源的需求越来越太,而太阳能以储量丰富、普遍存在、环保无污染占据相当的优势,所以对太阳能的开发利用具有重大意义。然而常规的太阳能发电的方式是将太阳能电池板固定在某一位置,对太阳能进行采集,平均光伏转换效率较低,并且一台嵌入式系统只控制一块太阳能光伏板,极大的浪费了资源。本设计采用ARM11作为控制系统,控制多个太阳能光伏板,通过对光敏电阻的采集和比较,控制电机调整太阳能板的位置。实现太阳能光伏板自动跟踪太阳的功能,使太阳能光伏板能自动对着太阳,从而提高光伏发电系统光伏转换的效率。同时为了减少电机对电能的消耗,本系统兼顾了电机间歇工作方式,每个太阳能光伏板每25分钟调整一次与太阳的左右对应,每二周调整一次与太阳的上下对应。
1 基于ARM太阳能光伏板自动跟踪系统整体结构
如图1所示是基于ARM11的嵌入式光伏板自动跟踪系统的整体框图,该系统设计成双轴自动跟踪,自动跟踪太阳的强度,使太阳光垂直入射在太阳能光伏板的表面以获取最大发电效率,本系统主要由葵花太阳能光伏板、光敏电阻、放大器、光电二极管、电机[1]、电机驱动芯片、减速器、立体支架和ARM11组成。系统通过比较光敏电阻的大小,由ARM11发出命令给电机驱动器,驱动电机向阻值大的一端自动旋转。第一步比较左右2个光敏电阻的阻值,通过调整直到2个光敏电阻的阻值相等时,停止左右旋转;第二步比较水平上方的电阻的阻值与左右方向的其中一个电阻的阻值,通过调整直到两个光敏电阻的阻值相等时,停止上下旋转;从而使多个葵花太阳能光伏板与太阳光保持最佳角度 (第二步2周运行一次)。
2 太阳能光伏板自动跟踪器的组成及工作原理
太阳能光伏板自动跟踪器[2-3]由ARM11,电机驱动芯片和相关电路组成。ARM11系统主要组成部分如图2所示。它主要是通过接收光敏电阻值,比较左右2个光敏电阻大小,得到两阻值之差,经过系统的简单处理,由系统发出命令给对应的电机驱动器,电机带动光伏板旋转到左右两个光敏电阻的阻值相等的位置,然后再比较水平上方的电阻阻值与左右方向的其中一个光敏电阻阻值的大小,得到两阻值之差,经过系统的简单处理,由系统发出命令给对应的电机驱动器,电机带动光伏板旋转到水平上方的电阻阻值与左右方向的其中一个光敏电阻的阻值相等的位置,电机停止旋转。从而实现光伏板自动跟踪太阳的功能。
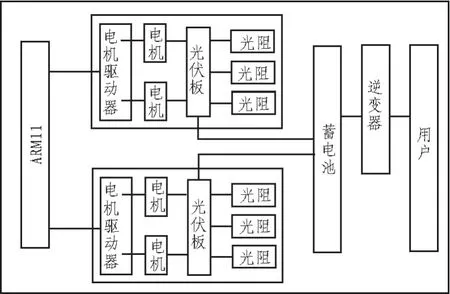
图1 基于ARM11的嵌入式光伏板自动跟踪系统的整体框图Fig.1 Based on the ARM11 embedded photovoltaic panels automatic tracking system overall block diagram
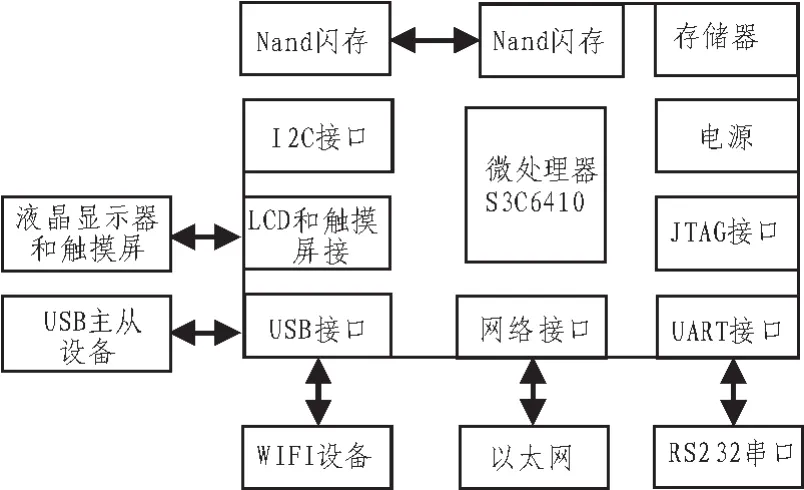
图2 ARM核心版模块图Fig.2 ARM core module diagram
3 太阳能光伏板支架控制器的组成及工作原理
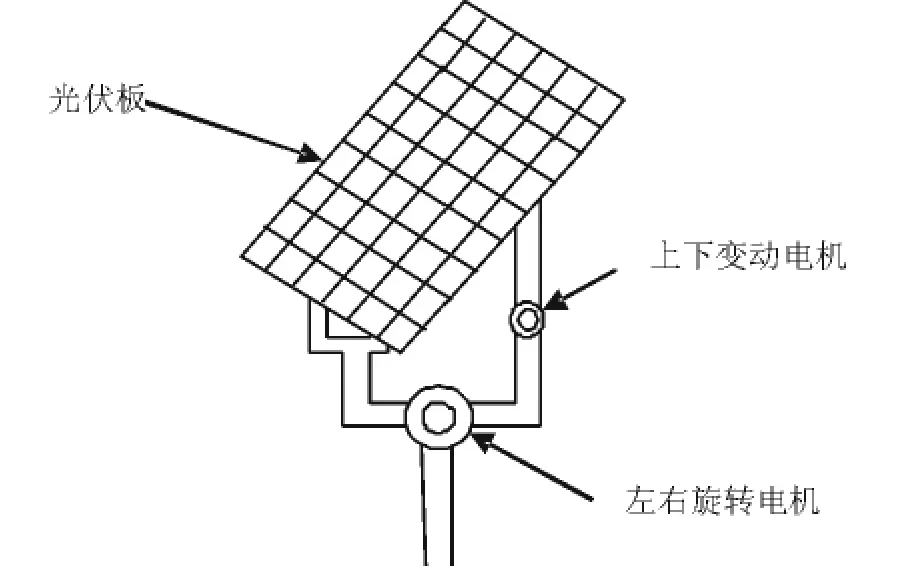
图3 太阳能光伏板支架控制器结构图Fig.3 Solar panel bracket structure diagram of the controller
如图3所示是太阳能光伏板支架控制器结构图,支架控制器由光敏电阻传感器、放大器,光电二极管,电机组成。每个太阳能光伏板需要3光敏电阻传感器。左右2个光敏电阻传感器为一组,上方的光敏电阻传感器与左右2个光敏电阻传感器中的其中一个为一组。每隔25分钟系统就会比较左右2个光敏电阻传感器的阻值,经过系统简单的处理,把命令发给对应的光敏电阻传感器对应的电机驱动器,驱动对应的电机旋转,当左右2个光敏电阻传感器的阻值相等时,停止旋转,并休息25分钟;每隔2周系统就会首先比较左右两个光敏电阻大小,根据比较的结果,由控制系统把命令发给光敏电阻传感器对应的电机驱动器,驱动对应的电机旋转,当左右2个光敏电阻传感器的阻值相等时,停止左右旋转;接着比较水平上方的电阻阻值与左右方向的其中一个光敏电阻的阻值的大小,根据比较的结果,由控制系统发出命令给对应的电机驱动程序,直到调整到两个阻值的大小相等时,控制上下方向的电机停止旋转,并休息2周;实现太阳能光伏板自动跟踪[4-5]太阳。
4 系统的硬件设计
如图4所示是电机驱动模块设计图,为了提高太阳能光伏板自动跟踪系统的灵敏性,充分发挥ARM11的性能[6],更好的展现一机多能的优点,本设计在电机驱动器里嵌入了芯片,使单个太阳能光伏板成为一个独立的灵活的个体,同时又都在同一个ARM11系统的控制下。每个电机驱动芯片不但能完成驱动电机实现光伏板跟踪太阳的能力,同时还能随时向ARM11系统传输实时数据,也能从ARM11系统那里接受命令和执行命令。每个电机驱动器通过RS-232与ARM11相连接,电机驱动器采用直流供电。
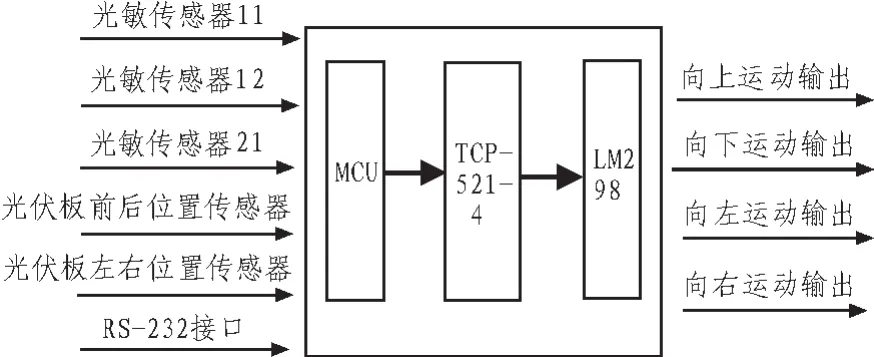
图4 电机驱动模块设计图Fig.4 Motor drive module design
5 系统软件的实现
如图5所示是系统控制流程,本系统软件是采用VC++开发出来的图像界面,界面友好,操作简单,支持触摸操作。开机之后,系统开始自动检测,识别各个电机驱动器及相应的芯片,一旦发现没有识别到的电机驱动器会自动报警,并在报警窗口提示没有识别的电机驱动器的编号;检测各个驱动器工作状态,发现工作不正常的驱动器会自动报警,并在报警窗口提示它的编号;系统识别和检测结束,各个驱动器开始工作,首先获取左右方向组的光敏电阻的阻值,进行比较,得到大小,系统发出命令给电机驱动器,电机旋转,当左右阻值相等时电机开始停止工作,并休息25分钟;每隔2周系统就会首先比较左右2个光敏电阻大小,根据比较的结果,由控制系统把命令发给光敏电阻传感器对应的电机驱动器,驱动对应的电机旋转,当左右2个光敏电阻传感器的阻值相等时,停止左右旋转;接着比较水平上方的电阻阻值与左右方向的其中一个光敏电阻的阻值的大小,根据比较的结果,由控制系统发出命令给对应的电机驱动程序,直到调整到两个阻值的大小相等时,控制上下方向的电机停止旋转,并休息2周;从而实现太阳能光伏板自动跟踪太阳。

图5 系统控制流程Fig.5 System control flow
6 结 论
本研究基于ARM11,采用光敏电阻比较法,并结合了3只眼昆虫识别方向的特点,设计了一机多能自动跟踪系统,使太阳能电池板自动保持与太阳光垂直。太阳能电池板自动跟踪太阳光的研究,有效地提高了太阳能的利用率,增加了每天的发电功率输出,并从整体上降低了太阳能光伏板联合发电的成本,不但具有很高的经济效益,而且非常适合社会和经济发展的要求,应用前景广阔。
[1]朱卫红,邢旭辉,王振华,等.异步电动机交-直-交变频矢量控制的应用和日常维护 [C]//全国冶金自动化信息网2010年年会论文集,2010:755-758.