船载卫星通信地球站伺服系统硬件设计
2013-09-25黄剑波朱宗玖
黄剑波,朱宗玖
0 引言
由于近年来自然灾害的频繁发生,人们意识到良好通信能力的重要性。卫星通信以其远距离通信、良好的机动性、受地形限制少等优点日益受到人们的青睐和重视[1]。当卫星通信技术应用于航海时,伴随着舰船的移动,船载卫星通信系统会出现收发信号不稳定的情况。船载卫星通信地球站伺服系统是以C8051F020为主控模块,依据其良好的扩展能力,结合稳定模块、跟踪模块、监控台等外设设计而成。主控制板通过SPI串行总线接口和2个增强型UART异步串行接口同时与外界进行串行数据通信。用户可以通过手持设备PDA等设备对跟踪状态进行监控。伺服系统可以很好的克服载体运动带来的干扰,从而实现运动中数据、话音、图像稳定地传输。
1 卫星通信系统简介
卫星通信简单地说就是地球上的无线电通信站间利用卫星作为中继而进行的通信。卫星通信使用频率为0.3~300 GHz的微波频段。这种多个地球站之间利用卫星作为中继而进行通信的系统称为卫星通信系统[2]。
卫星通信系统通常由通信卫星、通信地球站分系统、跟踪遥测及指令分系统和监控管理分系统四部分[3],如图1 所示。
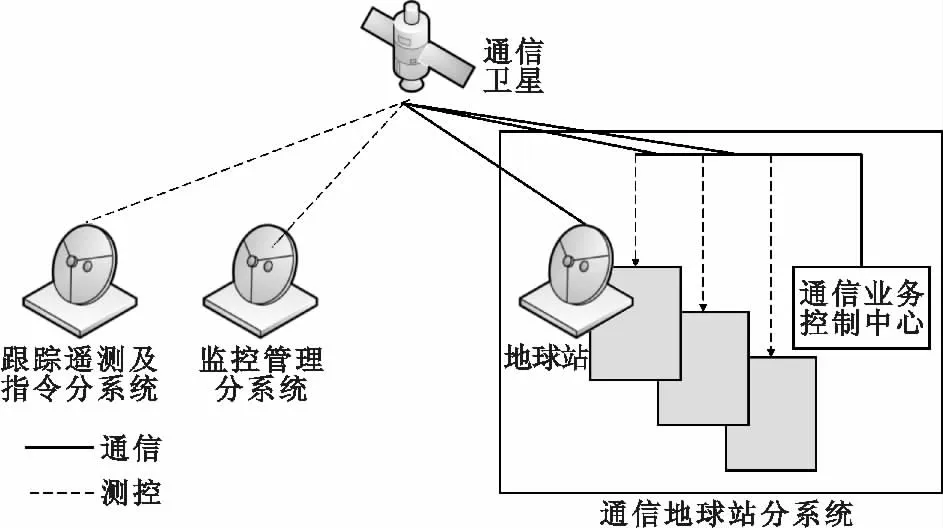
图1 卫星通信系统的组成Fig.1 Composition of satellite communication system
2 船载卫星通信地球站伺服系统
整个系统按功能划分为处理器模块、监控模块、稳定模块、跟踪模块和执行机构五个部分[4]。系统组成框图如图2所示。

图2 系统组成框Fig.2 System composition block diagram
系统启动后,首先对卫星进行参数设置,然后接收含有经、纬度信息的GPS电文,以此对天线进行定位。设天线所在位置的经、纬度分别为φ1和θ1,接收卫星星下点s的经度为φ2,而φ=(φ1-φ2)为星下点s与地球站之间的经度差,通过公式可以得到跟踪卫星的天线方位角 φa,俯仰角 φe和极化角 φp[5]。

天线对准卫星后,角速度陀螺可以感知到天线姿态的微弱变化,并输出与旋转速度成比例的电压,处理器模块对输出电压定时处理后得到方位和俯仰角误差信息,并根据误差角度驱动步进电机[6]。在对天线误差角度的补偿过程中,由于零点漂移和陀螺精度的限制,可能仍然会存在少量误差。在系统中配合以圆锥扫描跟踪,可以进一步消除角度误差,使天线精确对准卫星。
2. 1 跟踪方式
船载天线控制系统通过对天线各种数据的采集得出天线的倾角进而调整天线的方位。跟踪系统依据天线跟踪目标方式的不同可以分为手动跟踪、程序跟踪和自动跟踪三种,其中应用最为广泛的是自动跟踪,而自动跟踪方式又可进一步分为步进跟踪、单脉冲跟踪、圆锥扫描跟踪这三种基本方式。文中主要讨论的是圆锥扫描跟踪方式。
2. 2 圆锥扫描跟踪方式
圆锥扫描跟踪的原理是天线波束偏离天线对称轴一定的角度,并绕对称轴快速旋转,在波束最大增益方向呈圆锥形旋转。如果卫星偏离天线对称轴,目标回波信号将由等幅信号变为一个幅度调制信号。对信号解调和鉴相可得到天线波束的角误差,用以控制天线向减小目标偏角的方向转动,实现跟踪。这种工作方式虽然设备较简单,但是馈源偏离抛物面的焦点做持续的圆周运动,会造成天线增益和可靠性的下降。
载体高速运动时,为了对目标进行准确的跟踪,可以采用提高圆锥扫描的角速度的方法,但是结构上的难以实现和跟踪接收机的滞后性将制约系统在这一情况下的跟踪能力。经过实验,适合本系统的圆锥扫描速率在 7.5 ~9.5 Hz。
3 硬件系统设计
3. 1 地球站伺服系统硬件结构
地球站伺服系统的硬件原理结构如图3所示。在伺服系统中,倾斜仪能够输出天线面的俯仰角度和横滚角度,罗盘可以输出天线面的方位角度,系统根据角度数据驱动俯仰电机、极化电机和方位电机到达目标的相应角度。
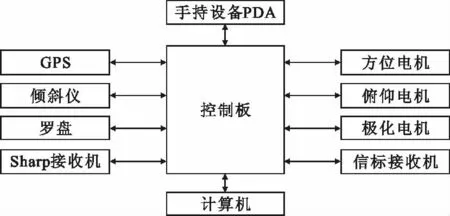
图3 地球站伺服系统硬件框Fig.3 Earth station servo system hardware block diagram
稳定模块中的倾斜仪和罗盘等部分会存在一定的误差,因此系统需要在正确的对星角度周围做扫描运动,借助接收机来使天线面最终对准卫星。
3. 2 相关模块设计
系统中的GPS模块使用的是SiRFstar III,这一芯片通过采用20万次/频率的相关器提高了灵敏度,可以同时追踪20个卫星信道。它的输出数据波特率为4 800,并且支持协议讯息NMEA-0183。
倾斜仪模块使用SANG1000-D065双轴倾角传感器,它可以输出倾斜角度和横滚角度。每秒20次的数据输出频率和正负60度的测量范围可以满足系统实时监测倾斜角度和横滚角度的需求。
罗盘模块采用PNI电子罗盘系列中的三轴罗盘TCM5,它采用磁感应技术,在任何环境下都能保证精度,分辨率高达0.1°。而且在正负90度的俯仰和正负180度的横滚范围内都可以使用。
接收机将天线接收到的微波信号进行放大,并将其幅度转换为直流信号,直流信号的强弱对应于微波信号的大小。接收机的跟踪信号分为信标信号和导频信号两种。前者直接来自于卫星本身,在没有其他导频信号的前提下,可以利用信标接收机实现对卫星的实时跟踪。大部分卫星都会转发含有通信信息的导频信号,例如移动通信系统中的导频信号。因此也可以利用导频接收机来实现对卫星的跟踪。此次设计的伺服系统采用两种接收机并存的方式,可以保证跟踪的可靠性。
伺服系统在跟踪的过程中,对于数据的监控是必不可少的。采用无线局域网协议的监控软件相对于传统的串口监控来说,最大的优势就在于便于用户的操作。用户可以在笔记本电脑上或掌上电脑PDA上实现对系统各模块的状态和各项参数的监控。
3. 3 C8051F020 单片机
C8051F020微处理器是完全集成的混合信号系统级芯片,与MCS-51指令集完全兼容。该芯片拥有8个8位的数字I/O端口,大量减少了外部连线和器件扩展;64 K字节可在系统编程的FLASH存储器、4352字节的片内RAM和可寻址64 K字节地址空间的外部数据存储器接口;5个通用的16位定时器、片内看门狗定时器和5个捕捉/比较模块的可编程计数器/定时器阵列等[7]。
4 结语
针对舰船移动时卫星信号收发不稳定的情况,设计了一种船载卫星通信地球站伺服系统。该系统在高速、高性能的微处理器C8051F020型单片机的基础上,通过并行数字I/O端口和串行接口等与外设进行数据交换,同时开发了串口通信应用程序。最后在单片机和模拟摇摆台上进行了功能测试,结果表明该系统基本实现了跟踪数据的采集和监控。为船载卫星通信地球站伺服系统在舰船上的应用提供了可行性方案。
[1] 方华,丁科,续欣,等.SCPC/DAMA卫星地球站软件设计与实现[J].通信技术,2010,43(12):26-28.
FANG Hua,DING Ke,XU Xin,et al.The SCPC/DAMA Satellite Earth Station Software Design and Implementation[J].Communications Technology,2010,43(12):26-28.
[2] 夏克文.卫星通信[M].西安:西安电子科技大学出版社,2008.
XIA Ke-wen.Satellite Communication[M].Xi'an:Xi'an University of Electronic Science and Technology Press,2008.
[3] 王秉钧,王少勇,田宝玉.现代卫星通信系统[M].北京:电子工业出版社,2004.
WANG Bing-jun,WANG Shao-yong,TIAN Bao-yu.Modern Satellite Communication System[M].Beijing:Electronic Industry Press,2004.
[4] Sea Tel公司.船载卫星天线的佼佼者(一)[J].数字通信世界,2003,23(08):122-129.
Sea Tel Company.Shipborne Satellite Antenna Leader(One)[J].Journal of Digital Communication World,2003,23(08):122-129.
[5] SCHAUB H,JUNKINS L J.Stereographic Orientation Parameters for Attitude Dynamics:A Generalization of the Rodtigues Parameters[J].Journal of the Astronautical Sciences.1996,48(01):1-19.
[6] 尹志忠,陈静毅,周贤伟.美军卫星通信系统的发展及其技术研究[J].通信技术,2009,42(11):55-58.
YIN Zhi-zhong,CHEN Jing-yi,ZHOU Xian-wei.The Development of Military Satellite Communication Systems and Technology Research[J].Communications Technology,2009,42(11):55-58.
[7] 孙立香,赵不贿,刘星桥.C8051F020与80C51单片机的异同点[J].国外电子元器件,2007(05):31-35.
SUN Li-xiang,ZHAO Bu-hui,LIU Xing- qiao.Similarities and Differences between C8051F020 and 80C51 Family[J].Foreign Electronic Components,2007(05):31-35.