NMOHEMS探头模型的制作及实验方法研究
2013-09-21陈振涛王晓蕾郑君杰
陈振涛,钟 中,叶 松,王晓蕾,郑君杰
(解放军理工大学气象学院,南京 211101)
0 引言
新型远海机动水文环境监测系统[1](简称NMOHEMS,以下同)是将无人机技术、流星余迹通信技术[2]和海洋水文现场探测技术[3]有效结合,适用于突发性、灾害性强海洋动力过程的新方法和新体制。主要由无人机及其控制发射机动单元、舰船和岸基用户单元、流余主站(可机动的控制与数据收集处理单元)和现场探测单元4大部分组成。现场探测单元内部装载有探头,可安装不同传感器测量多种水文要素。
NMOHEMS探头由传感器、数据处理器、信号传输线和电池等组成,测量水下800m以内的海洋剖面水文信息。基本工作原理为:无人机携带现场探测单元抵达目标区域,现场探测单元脱离无人机后,张开伞的瞬间将自身体积膨胀,保证现场探测单元落入海水后能够产生足够的浮力,并使其入水后保持竖直向上的姿态,同时进入潜伏状态,通过流星余迹技术与流余主站保持联系;当收到流余主站发来的探测指令后,首先向流余主站发送自身编号、探测位置和确认信息;然后在探测指令规定的时刻,所有现场探测单元同时释放探头;探头下沉过程中释放辅传输线,并由传感器采集不同深度的水文要素信息;经过信号放大、A/D转换后再由主传输线传送给现场探测单元在海面的主浮体,并发送回流余主站,可实现多点和多区域海水剖面要素的同步探测。
与AXBT等类似剖面探头相比,NMOHEMS探头具有外形更小、下沉速度更慢、深度分辨率更高等特点。其外形设计为弹体状,前部为尖拱形、中间为平直段、后部有收缩段,减少在水中下沉时受到的阻力;中间贯通有导流腔,确保水文要素传感器及时准确地测量;尾部带有尾翼,保证下沉过程的稳定性,设计要求探头质量为480g时的运动极限速度接近2m/s。
探头设计涉及材料科学、结构设计、电子技术以及流体力学等多个学科,几个学科高度关联、相互耦合。采用多学科设计优化[4]结合专家参与模式的思想,首先设计探头的概念模型,建立其多学科优化方程,然后利用协同优化方法求解,根据得到的优化结果提出改进意见,经过反复优化-改进的迭代过程,最终确定最优设计方案,探头的外形及各部件分布如图1所示,具体优化设计过程另文介绍。

图1 探头的外形及各部件分布图Fig.1 The shape and parts of the probe
探头的下落过程可以利用CFD动网格技术进行三维仿真,计算模型的参数设置,需要根据实验结果进行调整。利用计算机辅助设计结合三维快速成型技术(3D Rapid Prototyping)[5]制作探头模型,并在实验室水箱和水库两种环境下设计模型实验,以验证探头的优化设计结果,并为提高CFD数值仿真方法的准确性提供依据。
1 模型制作
传统的制作方法需要定制模具,耗费较高且工期较长。利用计算机辅助设计结合三维快速成型技术实现NMOHEMS探头模型的制作,以最短的时间对探头的设计进行评估、修改和实验,大大缩短了探头的研发周期。
三维打印成型主要包括CAD、CatalystEX、三维打印机和后处理4个过程。成型后各部件及探头模型整体如图2所示。水箱实验和水库实验中使用的探头模型,均利用上述方法按1∶1比例完成制作。
2 实验方法
由理论分析可知,探头从水面自由释放后首先加速运动,当重力、阻力和浮力平衡时,将达到极限速度,之后以此速度匀速下落,要求实验能够完整地记录整个加速过程。井彦明[6]等在海上进行了实验,因受影响因素较多,深度测量误差较大,而且海上实验成本较高;韩光[7]等将探头悬挂在3.5m水深的实验水箱上方,选择从3个不同高度释放,以获得不同的入水速度,然后将不同阶段的轨迹衔接在一起,获得全过程的下沉轨迹,但每次释放都存在入水冲击,对水面及探头周围水流的影响较大,而且水箱上方需要较高的空间。
图2 探头模型各部件及整体图Fig.2 Parts and fabrication of probe model
将实验分为实验室水箱和水库两种实验环境,实验室水箱中利用有限实验水深,精确调整其质量,采用从水面自由释放方式,利用高速摄像和数字图像处理技术,对较小质量探头的下沉运动进行精密测量,获得不同质量探头的下落曲线和极限速度,通过大量的实验,以调整CFD动网格的仿真计算方法;水库中利用自主研制的实验装置,对较大质量探头的下沉运动进行测量,以检验探头设计的有效性。
2.1 水箱环境
2.1.1 水箱实验方法
利用探头模型在实验室有机玻璃水箱中进行实验,玻璃水箱长和宽为L=0.6m、高为H=1.8m,内部装满水,实验环境构造如图3所示。将摄像机高度调至水箱的中间位置,即为H/2,距离水箱壁面为L0=1.25m,保持镜头水平,并调整焦距f使得镜头包含整个水箱。

图3 实验环境构造图Fig.3 Structural map of experiment environment
探头可以通过增减配重物精确调整总质量,增减配重物时应使整个探头的质量分布均匀,以保证探头下落的状态平稳。实验开始前,首先获得其在水中悬浮的质量M0=304.32g;然后增加相应的配重物,设定第一个下沉质量为M1,探头尾部带有一薄层铁环,可以利用电磁铁将其吸附在水面位置,等待水面稳定后首先触发高速摄像机开始拍摄,然后将电磁铁断电,探头从水面自由释放,高速摄像机记录探头下沉的全过程;继续增加其下沉质量,重复释放和拍摄过程;共拍摄10个不同质量探头的下沉过程,每个质量拍摄7组视频作为原始测量结果。
2.1.2 数据处理方法
首先裁剪视频,选取中间的有效部分,将其转换为图片集,检查是否存在丢帧;然后对图像进行校正,确定每张图片中探头的实际位置,最后得出探头质量为Mi时的下落深度-时间关系和极限速度VTi,并利用下式计算相应的阻力系数[8]:

式中:g为重力加速度,ρ为水的密度,Sa为探头的浸湿表面积。
实验拍摄的每组视频包含2000余帧图片,且存在水的折射和图像失真等问题,人工处理这些图片不仅工作量大,且存在较大的人为随机误差。基于Opencv环境编写了数字图像处理程序,主要包括背景图片处理和图片集处理,数据处理流程如图4所示。
图4 图像处理流程图Fig.4 Flow chart of image processing
首先将背景图片进行图像校正和灰度化处理,通过Canny和Houghman算法绘制背景图片的距离标尺模板,确定图片中每个像素所代表的实际长度;然后依次读入所有图片集,先与背景图片进行差分运算,再进行校正,得到探头的轮廓图;之后再对其进行膨胀与腐蚀运算,利用Canny算法进行边缘检测,校正边缘廓线的变形后,确定图像中探头位置;利用背景图片获得的单位距离标尺模板,计算出每一帧图片中探头的运动距离;每个质量有7组测量结果,以剔除粗大误差后的算术平均值作为最终测量结果;并选取探头下落距离在0~1.4m范围的数据作为有效数据。
2.1.3 误差分析
影响水箱实验拍摄效果的主要因素包括摄像机的拍摄速度和实验场地的照明视场噪声,造成图像中探头失真的主要因素包括摄像机镜头畸变、水的折射和探头处于不同高度时拍摄的边缘廓线变形等。
(1)拍摄速度
摄像机的拍摄速度越快,探头下落过程分割得越精细,但影像失真越严重;实验选择的摄像机最高拍摄速度为1000fps,实际使用中发现此时拍摄的影像曝光严重不足,分辨率差,像素尺寸只有224×56,不能很好地定位探头位置,对比后选择拍摄速度为240fps,影像的像素尺寸为1280×720。
(2)照明视场噪声
拍摄时如果周围有光源,会产生两类照明视场噪声:一类是随时间变化的随机起伏噪声,由供电电源波动及光源本身发光的不稳定性造成;另一类是随空间变化的起伏噪声,主要是因为照明光源不能使整个视场达到严格的均匀照明,造成探头表面的亮度不同,在图像处理时会对探头边缘检测产生影响,所以实验时需保证探头表面光照均匀稳定。
(3)摄像机镜头畸变
摄像机镜头产生的畸变包括径向畸变、偏心畸变和薄棱镜畸变。因为探头是垂直下落,左右基本无偏移,其中径向畸变的影响稍大。
选用带有均匀刻度的标尺放置在水箱玻璃壁面,在无畸变图像中,标尺刻度的坐标(xu,yu)应当是均匀分布的,而实际拍摄时的畸变图像中坐标(xd,yd)的分布是不均匀的。
预先计算出标尺无畸变图像所对应的畸变图像坐标,并以此作为模板储存。图像校正时,直接利用该模板对测量结果进行线性插值修正。
同一次实验,摄像机镜头的畸变关系不变;但当摄像机位置和焦距改变时,需要重新计算标尺模板。
(4)空气到水的折射
设某一时刻,图像中探头下落的深度为h1,入射角为α,折射角为β,水的折射率为n1,可以得到修正水的折射后测量深度h'1的计算公式为:

式中:α=arctan(),β=arcsin()。
(5)边缘廓线变形
图5为探头下落过程中处于较高位置(左)、中间位置(中)和较低位置(右)时的拍摄效果,因为拍摄角度不同,成像后的边缘轮廓也有较大差异;中间的探头位于镜头高度,轮廓最规则,基本无变形,而左右两个探头头部和尾部的边缘廓线变形严重,轮廓的长度变化也较明显,导致探头位置的判定误差较大,需要对其进行图像匹配。
图5 探头处于不同高度时的拍摄效果对比图Fig.5 Comparison of effects when the probe is at different heights
图像匹配常用的有模板匹配、目标匹配和动态模式匹配3种方法[9],本文采用模板匹配方法,其匹配速度较快,且有较高的匹配精度。左右两个探头头部和尾部变形最严重,中部平直段的长度变形也较大,收缩段的变形最小,而且区域也较大,如图5(c)所示,以包含收缩段的矩形区域作为匹配模板S,像素尺寸A×B=26×30。先将图像进行二值化处理,并提取边缘廓线,再进行匹配,可以显著提高匹配速度。设模板在拍摄图像T中对应的位置为(i,j),采用归一化相似度方法,模板与该位置相似度R的计算公式为:

式中:,R(i,j) 的取值范围为[-1,1],它取值最大时的(i,j) ,即为最佳匹配位置。
匹配的过程需要不断搜索,采用金字塔搜索算法[10],首先对原始图像进行金字塔分层,得到一组不同分辨率的图像,金字塔分解层数不宜过多,一般选择3~5层,依据公式为:

式中d=min{A,B}。依据(4)式的计算结果和实验统计,将图像分解为3层结构,分辨率依次为1280×720、640×360和320×180。
首先从分辨率最低的金字塔分层图像开始搜索,进行粗匹配,然后不断缩小搜索范围,逐级提高图像分辨率,进行由粗到精的匹配,最后在分辨率最高的图像中精确定位搜索目标,以匹配模板的几何中心点为探头下落位置C。
拍摄时摄像机的焦距f=4.6mm,水的折射率n1=1.33。探头质量为306.56g时,在探头下落过程中取7个不同时刻,对各时刻探头下落高度进行分析,系统误差修正前探头在图像中的纵坐标像素数为y,下落距离为h,系统误差修正后探头在图像中的纵坐标像素数为y',下落距离为h',对比情况如表1所示。
表1 水箱实验系统误差修正前后探头下落距离比较Table 1 Comparison of falling distances before and after system error modifying of experiment in lab pool
可以看出,探头下落至摄像机高度前的系统误差大于零,并逐渐减小;下落至摄像机高度后的系统误差小于零,并逐渐增大。
2.1.4 实验结果
实验得到探头的悬浮质量M0=304.32g,为提高实验稳定性,设定第一个下沉质量为M1=M0+2×0.56g,之后依次增加配重物质量0.56g。
按照上述方法进行实验,并完成图像处理和误差修正。发现实验的10个质量探头中,有6个质量探头在有效实验水深内达到匀速,质量的变化范围在3g以内。6个不同质量探头下沉的深度与时间关系和深度与速度关系,分别如图6和图7所示。
通过数据处理分析,以上6个不同质量的探头均已达到匀速状态。其极限速度对应的阻力系数采用式(1)计算,结果如表2所示。

图6 6个不同质量探头的下落曲线Fig.6 Sink curves of 6 weight probes

图7 6个不同质量探头的下落深度与速度曲线Fig.7 Sink deep and velocity curves of 6 weight probes

表2 水箱实验的极限速度和阻力系数Table 2 Limit velocity and Cd in lab pool
2.2 水库环境
2.2.1 实验方法
实验在船上进行,自行研制的实验装置主要包括托盘浮体、光电开关、控制计时器、释放线和探头模型1枚。托盘浮体漂浮于水面,其上带有支架、滑轮及光电开关,底面装载电磁铁,用于吸附探头。如图8所示。
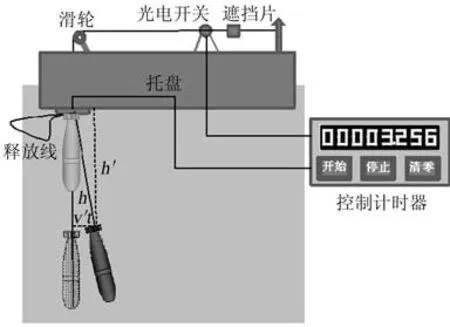
图8 水库实验方法示意图Fig.8 Schematic diagram of experimental method in lake
实验应尽量选择在水库等水质较好且无较大水流的水域,在水面风速较小时进行,以减小环境对测量结果的影响。实验开始前,首先预设释放线的长度,确定相应的下沉深度,将探头吸附在托盘底部的电磁铁上,此时大部分释放线自由漂浮在水面,托盘上方的小段释放线为松弛状态,光电开关右侧2cm处的释放线上固定一张遮挡片;按下开始键,电磁铁断电,探头开始释放;当探头下沉到指定深度时,释放线拉直,带动遮挡片触发光电开关,此时计时器停止计时,记录一组下沉深度和时间数据,回收探头;更改下沉深度,计时器清零,继续进行测量。
控制计时器采用STC89C52RC型单片机开发板进行设计,并编写控制计时程序,包括开始、停止和清零共3个控制按键,程序主要包括:初始化程序、定时器中断程序、测键号及判键号程序等,计时精度为1ms。
2.2.2 数据处理
实验探头质量为M,每个深度测量10次,采用t检验准则判别粗大误差,算术平均值作为测量结果,以消除随机误差;系统误差主要来源于装置与释放线的摩擦力和水面风的影响。
(1)摩擦力的确定
所有释放线均经过托盘支架和滑轮释放时的摩擦较大,且随释放线长度变化。选择将大部分释放线漂浮于水中,经过托盘支架和滑轮的释放线长度固定,此时释放线与装置间的摩擦力为常数,设为δ,则修正摩擦力后的极限速度V'T为:

δ可以利用空气中的探头释放实验确定,将探头质量调整为水库实验质量与漂浮质量的差值M'=M-M0,选择10个不同的释放线长度h进行实验,得到对应的下落时间t,根据物体在空气中的自由落体运动方程,得到:

每个长度重复测量10次,剔除粗大误差后,以算术平均值作为测量结果,确定释放线与装置的摩擦力δ=0.4289N,装置的计时误差范围为±2ms。
(2)水面风的修正
水面风对测量结果的影响较大,因托盘较轻,近似认为其漂移速度与风速v'相同。更改坐标系,将坐标原点定为电磁铁底面圆点,此时探头运动包括垂直方向的自由下沉过程和水平方向的匀速运动(大小与风速v'相同,方向相反),修正测量值h后,得到探头的实际下落深度h'的计算公式为:

修正后的极限速度V″T为:

2.2.3 实验结果
实验地点选择南京地区黄龙埝水库,水质良好且水流较小,实验区域水深大于10m,实验时风速为0.5m/s,水温5.9℃,实验探头重480g,共测量了0~6m间的6个深度,采用上述方法修正后的极限速度V″T为1.923m/s,验证了探头设计的有效性。误差修正前后的结果对比,如表3所示。

表3 水库测量结果与修正结果对比Table 3 Comparison of measurement and modifying results in lake
3 结束语
完成NMOHEMS探头模型的制作,并设计了实验室水箱和水库两个实验环境,进行了实验,得出主要结论如下:
(1)实验室水箱中探头的质量调整精确度较高,质量增量为0.56g;采用高速摄像记录下落过程,数字图像处理方法完成数据处理,并对结果进行了详细的误差分析和修正,可以作为提高CFD数值仿真方法准确性的依据;误差分析和修正方法对利用高速摄像技术的相关实验具有一定的借鉴意义;
(2)水库实验采用自行研制的实验装置,操作方便且计时误差较小,因实际测量时影响因素较多,尤其是水面风的影响较大,需要对测量结果进行修正,修正后的结果可以作为检验探头设计有效性的依据;水库实验装置设计与误差修正方法,可为类似野外环境的实验设计和实验方法提供参考。
此外,实验环境对实验方法和实验结果有较大影响,但有时也可以利用特定的自然环境来改善实验效果。比如针对水库实验,若在冬季水面结冰时进行,则可以消除水面风的影响,显著地改善测量结果。
探头在海上进行实验时,影响因素更多,困难更大,实验装置和方法还需要进一步的研究与改进。
[1] 叶松,王晓蕾,焦冰,等.NMOHEMS的概念与设计[J].海洋技术,2010,29(1):28-31.
[2] 周延年,叶松,郑君杰,等.利用流星余迹通信系统传输海洋数据[J].仪器仪表学报,2008,29(8):486-489.
[3] 焦冰,叶松,王晓蕾,等.军事海洋环境海水温度信息的获取研究[C]//第七届军事海洋战略与发展论坛论文集.北京:海潮出版社,2010:755-758.
[4] 王振国,陈小前,罗文彩,等.飞行器多学科优化理论与应用研究[M].北京:国防工业出版社,2006.
[5] 陈胜利.快速成型技术及其发展趋势[J].制造业自动化,2009,31(10):24-26.
[6] 井彦明,谭世祥.机载投弃式温盐深浮标中的三项关键技术研究[J].海洋技术,2001,20(4):48-53.
[7] 韩光,陶建华.新型航空海水温度、盐度、深度探头运动特性的计算方法和实验研究[J].海洋技术,2001,16(4):467-471.
[8] 王心明.工程压力容器设计与计算[M].北京:国防工业出版社,1986.
[9] 刘莹,曹剑中,许朝晖,等.基于灰度相关的图像匹配算法的改进[J].应用光学,2007,28(5):536-540.
[10]ADELSON E H,ANDERSON CH,BERGEN J R,et al.Pyramid methods in image processing[J].RCA Engineer,1984,29(6):33-41.
