带双轴太阳帆板驱动器的卫星建模与姿态控制
2013-09-20甘克力周明玮葛升民王磊沈毅
甘克力, 周明玮, 葛升民, 王磊, 沈毅
(1.哈尔滨工业大学控制科学与工程系,黑龙江哈尔滨 150001;2.中国空间技术研究院,北京 100094)
0 引言
为了充分利用太阳能电池产生的电能,卫星上均附带有太阳帆板。为使太阳能电池达到尽可能高的利用率,卫星还安置了驱动装置,其主要使命是带动电池阵转动并使其法线与太阳光射束重合,以获取尽可能多的电能。传统卫星太阳帆板驱动机构只有一个自由度,目的是控制太阳帆板使其与太阳光线垂直,但对太阳帆板引起的挠性振动却没有任何的抑制作用。到目前为止,仅仅在少数几篇报道性文献中提及双自由度太阳帆板驱动机构[1]:在铱星的系统介绍中提及使用了双自由度太阳帆板驱动器;α国际空间站文章介绍的图片中标明了帆板可以分别绕α轴和β轴转动。除此之外,还没有看到国外关于有关机构控制律介绍的文章。
早期航天器姿态控制大都基于传统的控制系统设计方法:P W Likins和A H Gale的研究为挠性航天器动力学与控制的研究奠定了理论基础[2];Hughes花费了相当多的精力研究系统动力学分析与控制问题[3]。现代控制理论中,文献[4-5]提出了几种柔性航天器的控制方法;滑模变结构控制作为一种具有快速响应、对模型不确定性和外界干扰同时具有良好鲁棒性的设计工具,被广泛应用在航天器的姿态控制上[6-7];文献[8 -9]采用了自适应控制方法来处理转动惯量不确定性以及干扰力。
上述方法是在单自由度太阳帆板驱动的情况下设计的,均受到帆板与卫星本体动力学耦合的影响。本文采用的双自由度太阳帆板驱动机构,可以控制帆板绕其横轴和纵轴两个方向转动,使太阳帆板振动和卫星本体的转动之间实现解耦,减小帆板振动对卫星本体的影响,提高卫星的控制精度[10]。双自由度太阳帆板驱动机构在两个自由度的方向上都设置有检测装置和驱动装置,第二个自由度由独立的电机控制,可以实现与卫星本体分开机动的功能。尤其是针对卫星大角度机动,可以采用卫星本体和帆板分开机动的策略,即卫星本体由姿态控制单元执行机构驱动,帆板由第二个自由度的电机驱动。机动方式也可以根据机动要求选择同时机动或分步机动。顾名思义,机动即帆板和卫星本体在同一时间开始机动;分步机动则是先控制卫星本体跟踪期望姿态角,此时帆板不跟随卫星本体转动,卫星本体到达期望位置后,再控制帆板转到帆板与卫星本体的连接支架平面内。这种驱动方式能够使太阳帆板挠性振动对卫星姿态机动的影响大大减小,提高卫星姿态控制精度。
本文针对带挠性太阳帆板的卫星,采用双自由度帆板驱动机构,对其动力学方程进行建模,在此基础上利用反馈线性化方法结合经典PD控制设计卫星姿态机动的控制律并进行仿真。
1 带双轴帆板驱动器卫星动力学模型
双轴太阳帆板驱动模型如图1所示,其中驱动电机采用无刷直流电机,角度传感器采用旋转变压器。
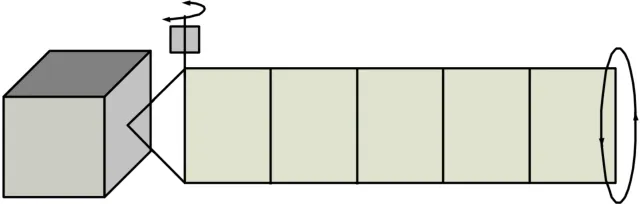
图1 带双轴太阳帆板驱动器的卫星简化模型Fig.1 Model of satellite with dual axis solar array actuator
假设卫星由一个中心刚体B和m个一端与其相连的挠性附件Bi构成,其中i=(1,2…,m),此处考虑的是安装有一个太阳帆板的卫星,故动力学方程中取m=1。由文献[11]可知,一般的带有挠性附件卫星的动力学方程为

式中:Btrani为平动耦合系数矩阵;Broti为转动耦合系数矩阵;mT为整星质量;VT为质心线速度;F为作用在卫星上的外力;IT为未变形卫星的惯量阵;ω为卫星的绝对角速度;TSAT为系统相对于质心的力矩;ζi为结构阻尼对角阵;Λi为振型频率对角阵;qi为模态坐标。
当卫星进行大角度机动或与空间站对接时,一般忽略轨道推进引起的挠性振动,只考虑平移运动与姿态的耦合,故忽略平动耦合系数的影响。假设已用有限元法求得在帆板坐标系中的帆板转动的耦合系数矩阵,下文中用Q来表示该耦合系数矩阵。由于第2节控制律设计过程中将用到四元数,为区别开来,改用η表示帆板振动的模态坐标,则忽略平动后的卫星动力学方程为

由于帆板是双自由度的电机控制,所以帆板的振动只和帆板自身的转动耦合,可单独列写帆板的姿态动力学方程为

其中,α为帆板转角,Is为太阳帆板的转动惯量,Tα为施加在帆板上的力矩。
当第二个自由度电机对帆板施加力矩来驱动帆板转动的同时,对卫星本体也施加了一个同样大小的反作用力矩,因此,带有太阳帆板双轴驱动器的卫星动力学方程变为

其中,I为卫星本体转动惯量矩阵。
2 控制律设计
下面进行带有双轴太阳帆板驱动器卫星的姿态控制律设计。本文提出帆板与卫星本体分开机动的新型方案,将帆板与卫星本体分开控制,实现帆板和卫星本体之间的振动解耦,即帆板由第二个自由度电机控制驱动,卫星本体由中心刚体内部的执行机构控制,控制模型的方框图如图2所示。
由于所建立的动力学模型中带有一定的非线性,因此本文采用反馈线性化方法来设计卫星姿态控制律[12]。这种方法的核心思想是把一个非线性系统代数地转化为一个线性系统,以便可以应用线性化系统的技巧。

图2 双轴太阳帆板卫星控制方框图Fig.2 Control block diagram of satellite with dual axis solar array actuator
根据反馈的方式和需要可分为输入-状态反馈线性化和输入-输出反馈线性化两种形式。本文采用状态反馈线性化,如图3所示。

图3 状态反馈线性化方框图Fig.3 Block diagram of feedback linearization
2.1 太阳帆板控制律设计
将式(3)中两式组合,得

其中,ωT为帆板模态振动频率向量。式(5)经整理后可得

设帆板转角控制指令值为αc,则误差角e=ααc,由式(3)得

由反馈线性化原理可得

其中,Kp>0,Kd>0,且有

2.2 卫星本体控制律设计
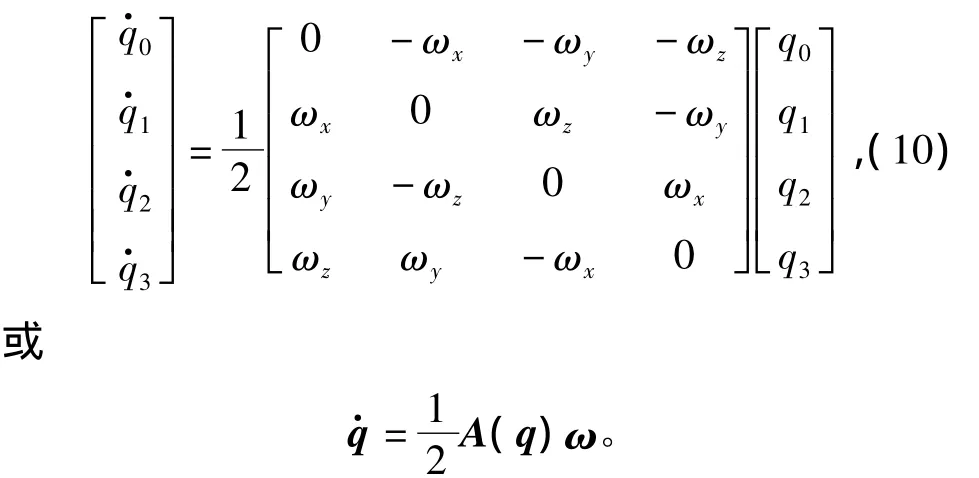
由于常用的欧拉角姿态方程在大角度机动时会出现奇异问题,因此在姿态控制系统设计时,往往采用四元数表示的运动学方程。设ω为卫星本体坐标系相对于惯性坐标系的角速度矢量,它在本体坐标系中的分量可以表示为:[ωxωyωz]T,设q·是轨道坐标系旋转到本体坐标系的四元数矢量,且q=q0+q1i+q2j+q3k,则应用四元数表示法时,卫星的运动学方程[13-14]可以表示为

其矩阵形式为
其矩阵形式为

分别用W和A表示Ω(ω)和A(q)运算矩阵,假设qe为误差四元数,qc为目标四元数,则

由式(10)和式(11)可知

其中ωe为误差角速度,于是有

根据反馈线性化原理

由于太阳帆板的安装结构和帆板分步机动的原因,太阳帆板转动的角度和卫星本体机动的角度不同,如图4所示a为太阳帆板连接轴的长度,b为帆板实际长度,卫星开始机动时刻帆板所在平面为OYZ平面。在分步机动的情况下,定义卫星本体转动角度为φ,则连接轴随本体的转动角度也为φ,但太阳帆板并不随其转动,定义帆板与连接轴之间的夹角为α。因此当帆板再需转到OYZ平面内时,需转动的角度为α,则α与φ有如下关系。
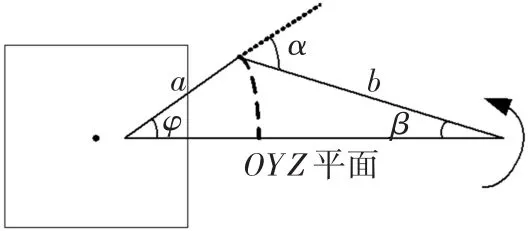
图4 帆板连接结构简图Fig.4 Diagram of array connection mechanism
由正弦定理

其中,β=α-φ。
因此得出帆板转动角度和卫星本体转动角度的关系为

根据所研究卫星的结构和参数,经过计算,得出a=2.1,b=18。
3 Matlab仿真
本文讨论的某卫星由一个中心刚体和一个太阳帆板组成。中心刚体的尺寸为1.6 m×2 m×2.5 m,质量为400 kg。太阳帆板的安装位置与刚体部分的质量中心偏离40 cm。太阳帆板长18 m,宽2 m。整个卫星沿其星体主轴坐标系的转动惯量是:Ix=5 954 kg·m2;Iy=1 765 kg·m2,Iz=6 042 kg·m2。
其中涉及的参数帆板转动惯量为Is=276 kg·m2,帆板前三阶振型与转动的耦合系数分别为6、-5.45、4.008。帆板和卫星本体控制参数如下:滚动轴帆板控制参数为Kpsx=17.18,Kdsx=91.62;卫星本体控制参数为Kpax=535.86,Kdax=2857.9。俯仰轴卫星本体控制参数Kpay=158.85,Kday=847.2。偏航轴卫星本体控制参数 Kpaz=543.78,Kdaz=2900.2。由于机构的限制,帆板只能控制绕滚动轴的转向,故俯仰轴和偏航轴的控制参数为0。
卫星初始姿态角为[10°-13°15°],稳定到0°后,滚动角机动60°,其他两轴姿态角度保持0°。卫星本体于50 s机动,帆板于80 s机动。分步机动情况下的姿态角响应、四元数变化曲线和帆板振动的模态坐标曲线分别如图5~图7所示。

图5 分步机动情况下的姿态角响应曲线Fig.5 Attitude angles response of synchronized maneuver strategy

图6 分步机动情况下的四元数响应曲线Fig.6 Attitude quaternion curves of synchronized maneuver strategy
为了与单轴太阳帆板卫星进行对比,本文采用实际工程中应用的PD控制律对单轴驱动情况下的控制系统进行设计。其中俯仰轴采用极点配置法,经过仿真调试,最终确定的控制参数为Kp=158,Kd=748,其控制律取为

式中:Tcy为俯仰通道控制力矩,θe为俯仰角误差。
由于滚动轴和偏航轴的姿态运动是耦合的,所以先对两轴的运动进行解耦,然后分别进行控制。为了达到姿态运动的解耦,设计控制律为

式中:Tcx、Tcx为两轴控制力矩,ψ、φ为滚转角和偏航角,ITx、ITy、ITz为 IT的三轴分量,控制参数如下:滚动轴控制参数为Kpx=535.86,Kdx=2679.3;俯仰轴控制参数为 Kpz=543.78,Kdz=2718.9。

图7 分步机动情况下的帆板模态坐标Fig.7 Solar array modal coordinate of synchronized maneuver strategy
本节验证双轴太阳帆板在抑制挠性振动和提高姿态稳定精度方面的可行性与优势。下面仅给出单轴太阳帆板卫星三轴姿态角仿真曲线即可说明问题。图8~图10分别为单轴驱动情况下卫星俯仰轴、滚转轴和偏航轴的响应曲线。仿真条件为:卫星初始姿态角为[10°-13°15°],三轴初始角速度均为0。此处对X轴进行姿态机动控制,其它两轴进行姿态稳定控制这种典型情况进行仿真。
由图5~图7可以看出,在双轴驱动情况下,初始状态下三轴姿态角经过约15 s达到稳定。滚动角机动后经过约30 s达到目标姿态。滚动角的超调量控制在10% ~15%内,稳定精度优于 ±0.001°,俯仰角和偏航角稳定时间为20 s。帆板于机动后经过约25 s重新转到OYZ平面内。由图8中帆板前三阶模态坐标曲线可知,帆板的挠性振动得到了较好的抑制。而单太阳帆板卫星仿真中,滚动角的超调量达到20%,稳定精度由于帆板振动的影响为±0.1°,俯仰和偏航角稳定时间为25 s。

图8 单轴太阳帆板卫星俯仰角响应曲线Fig.8 Pitch angle response of satellite with single axis solar array actuator

图9 单轴太阳帆板卫星滚转角响应曲线Fig.9 Roll angle response of satellite with single axis solar array actuator
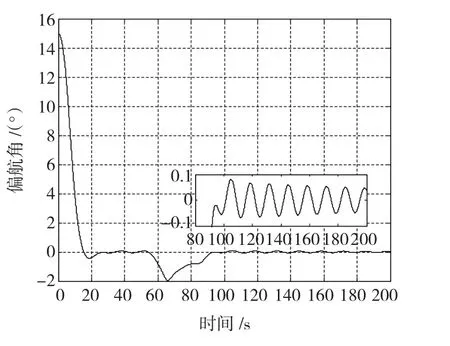
图10 单轴太阳帆板卫星偏航角响应曲线Fig.10 Yaw angle response of satellite with single axis solar array actuator
4 结语
由仿真结果可见,采用双自由度太阳帆板驱动机构明显减少了太阳帆板挠性振动的次数和振幅,并极大的缩短了稳定时间;实现了帆板振动和卫星本体之间的解耦,有效的抑制了帆板振动对姿态角稳定精度的影响,将姿态稳定精度提高了2个数量级。
[1]高星,王友平.太阳帆板驱动机构的现状和近期发展方向[J].控制工程,2006,5:54-56.
GAO Xing,WANG Youping.Current situation and development tendency of solar array drive mechanism[J].Control Engineering of China,2006,5:54 -56.
[2]LIKINS P W,GALE A H.The analysis of interaction between attitude control systems and flexible appendages[C]//Proceedings of the 19th International Astronautical Congress,October 13 -19,1968,New York,USA.1968,2:67-90.
[3]HUGHES P C.Attitude dynamics of a three-axis stabilized satellite with a large flexible solar array[J].Journal of the Astronautical Sciences,1972,10(3):166 -189.
[4]BEN A J,BURNS J A,CLIFF E M.Time-optimal slewing of flexible spacecraft[J].Journal of Guidance,Control,and Dynamics,1992,15(2):360-367.
[5]KELLKAR A G,JOSHI S M.Global stabilization of flexible multibody spacecraft using quaternion-based nonlinear control law[J].Journal of Guidance,Control,and Dynamics,1996,19(5):1186-1188.
[6]靳永强,刘向东,候朝桢.含有参数不确定性的挠性航天器姿态跟踪滑模控制[J].控制理论与应用,2009,26(3):299-304.
JIN Yongqiang,LIU Xiangdong,HOU Chaozhen.Sliding-mode attitude tracking control for a flexible spacecraft with parametric uncertainty[J].Control Theory and Applications,2009,26(3):299-304.
[7]管萍,刘小河,刘向杰.挠性卫星的变结构姿态控制[J].控制理论与应用,2007,24(3):480-484.
GUAN Ping,LIU Xiaohe,LIU Xiangjie.Variable structure attitude control of flexible satellite[J].Control Theory and Applications,2007,24(3):480 -484.
[8]GENNARO S D.Adaptive robust tracking of flexible spacecraft in presence of disturbance[J].Journal of Optimization Theory and Applications,1998,98(3):545 -568.
[9]焦晓红,张立尧.挠性航天器姿态机动和振动抑制的自适应控制[J].电机与控制学报,2011,15(7):94-100.
JIAO Xiaohong,ZHANG Liyao.Adaptive output feedback control of attitude maneuver and vibration suppression for flexible spacecraft[J].Electric Machines and Control,2011,15(7):94-100.
[10]周明玮.带双轴太阳帆板驱动器的卫星建模与控制[D].哈尔滨:哈尔滨工业大学控制科学与工程系,2010:11-56.
[11]屠善澄.卫星姿态动力学与控制(4)[M].北京:宇航出版社,2006:420-424.
[12]HASSAN K Khalil.Nonlinear Systems[M].Beijing:Publishing House of Electronics Industry,2007:505 -544.
[13]王淑一,魏春岭,刘其瑞.敏捷卫星快速姿态机动方法研究[J].空间控制技术与应用,2011,37(4):36-40.
WANG Shuyi,WEI Chunling,LIU Qirui.A quick attitude maneuver algorithm for agile satellites[J].Aerospace Control and Application,2011,37(4):36 -40.
[14]陈万春,肖业伦,赵丽红,等.四元数的核心矩阵及其在航天器姿态控制中的应用[J].航空学报,2002,21(5):389-392
CHEN Wanchun,XIAO yelun,ZHAO Lihong,et al.Kernel matrix of quaternion and its application in spacecraft attitude control[J].ACTA Aeronautica et Astronautica Sinica,2002,21(5):389-392.