基于模糊控制的车辆自适应巡航系统设计
2013-09-19赵秀春徐国凯葛平淑
赵秀春,徐国凯,张 涛,葛平淑
(大连民族学院机电信息工程学院辽宁大连116605)
车辆自适应巡航控制技术ACC(Adaptive Cruise Control System)能够辅助驾驶员驾驶,降低驾驶强度,提高驾驶性能,改善驾驶舒适性,因此自上世纪就得到了各大汽车厂商的广泛关注,成为各大研究机构研究与开发的关键技术之一[1-2]。汽车定速巡航系统自20世纪70年代就逐渐开始装配在全球著名汽车公司的高级轿车上,随着电子、计算机及控制技术的迅速发展,汽车巡航控制系统传感器技术、信息融合技术等软硬件技术日趋成熟,为了进一步提高系统的控制精度和稳定性,对于控制算法的研究亦成为自动巡航系统研究的热点和关键技术[3-5]。目前,用于巡航系统的控制算法主要包含针对驱动、制动力矩控制以及最近提出的分层控制[6-7]。由于巡航系统的复杂性和跟车巡航控制具有很强的非线性和不确定性,本文基于分层控制原理,采用模糊控制算法对车辆巡航系统进行自适应的定速巡航与跟车巡航的综合控制,应用Matlab Simulink及硬件在环技术进行仿真实验研究。
1 自适应巡航系统结构与原理
汽车自适应巡航系统的工作原理是ACC控制器根据测距雷达及其他传感器返回的信息,控制目标车辆的纵向运动状态,从而保持期望的车辆速度和与前方引导车之间的安全距离。其功能主要为:当前方无引导车时,控制目标车辆按照设定的巡航速度行驶;当前方出现引导车后,目标车辆将逐渐靠近前车,并将其视为引导车,在保持安全车间距离的要求下跟踪前车行驶,实现较少驾驶员的操作,减轻其疲劳程度;使车辆在巡航控制期间,能够适应风力和道路坡度变化所引起的汽车行驶阻力变化,自动变换节气门开度保证汽车燃料最佳经济性规律的稳态行驶。本自适应巡航控制系统既适用于单一的低速定速巡航控制,也适用于高速行驶工况中的定速控制和距离控制两种功能的结合,其中定速控制即车前方没有引导车辆或引导车辆在安全车距以外时,按照驾驶员设定的车速行驶;距离控制是指当前方安全车距以内有车辆行驶,且车速小于本车车速时,选定前方车辆作为引导车,按照控制策略自动跟踪引导车行驶。
为了简化系统的设计难度和便于控制器设计,本文所设计的自适应巡航控制系统由上位控制系统、下位控制系统和车辆模型3部分构成。上位控制系统包含两种工作模式即车辆定速巡航功能和跟踪前车运动功能,以及工作模式的自动切换功能。下位控制系统主要是建立加速度与车辆节气门开度之间的关系,从而直接获得期望的节气门开度。下位控制系统包含下位控制器和理想加速度与节气门踏板之间的逆模型。通过下位系统得到真正用以控制车辆速度的节气门踏板信号。车辆模型由发动机动力模型、变矩器与变速器模型以及车辆纵向动力学方程组成。控制系统结构如图1。
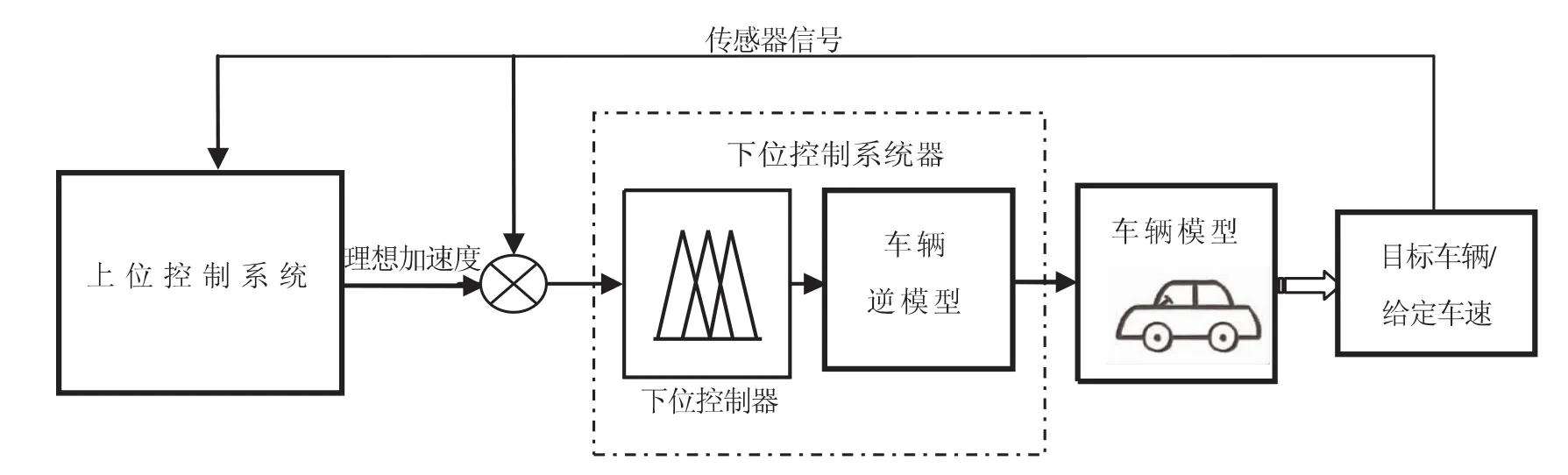
图1 ACC系统结构
2 车辆自适应巡航系统设计
本系统采用分层控制,根据工况自适应切换定速巡航和跟车巡航两种模式,同时利用模糊PI控制实现巡航系统的高性能控制。
2.1 上位控制系统设计
上位控制系统主要实现汽车工作模式的切换,即通过选择定速巡航控制和跟车巡航控制两种模式,分别实现车辆定速巡航功能和跟踪前车运动功能。切换逻辑通过测量车辆工作状态,如车间距离误差,速度误差以及本车加速度等信息判断当前车辆属于哪种工作模式并计算出期望车辆加速度作为输出期望加速度,以此作为下位控制系统的输入,上位控制系统的结构如图2,其中工作模式选定模块根据驾驶员设定的巡航速度和传感器获得的信号,判断是否有车辆出现或离开有效车距范围内,且前车车速是否低于巡航车速上限,从而自动切换到跟车巡航控制或定速巡航控制模式来控制得到不同的理想的期望加速度值。

图2 上位控制系统
2.2 下位控制系统设计
本系统下位控制器采用的是模糊PI控制器,充分利用PI控制器结构简单、容易实现、适于工程实际的特点,同时又结合了模糊控制响应速度快、鲁棒性强的优点。下位控制系统结构如图3,由下位控制器和车辆逆模型构成,通过驱动力方程、自动变速器模型和发动机map图得到车辆逆模型[2]。模糊控制器以理想加速度与实际加速度的误差e和误差的变化率ec作为输入,依据不同时刻e和ec对PI参数调节的要求,利用模糊控制规则在线对PI参数进行修改。该模糊控制器结合了实际动态特性及实际经验,通过模糊规则推理,自动实现PI参数的最佳调节,使自动巡航系统具有更好的稳态精度和动态性能。
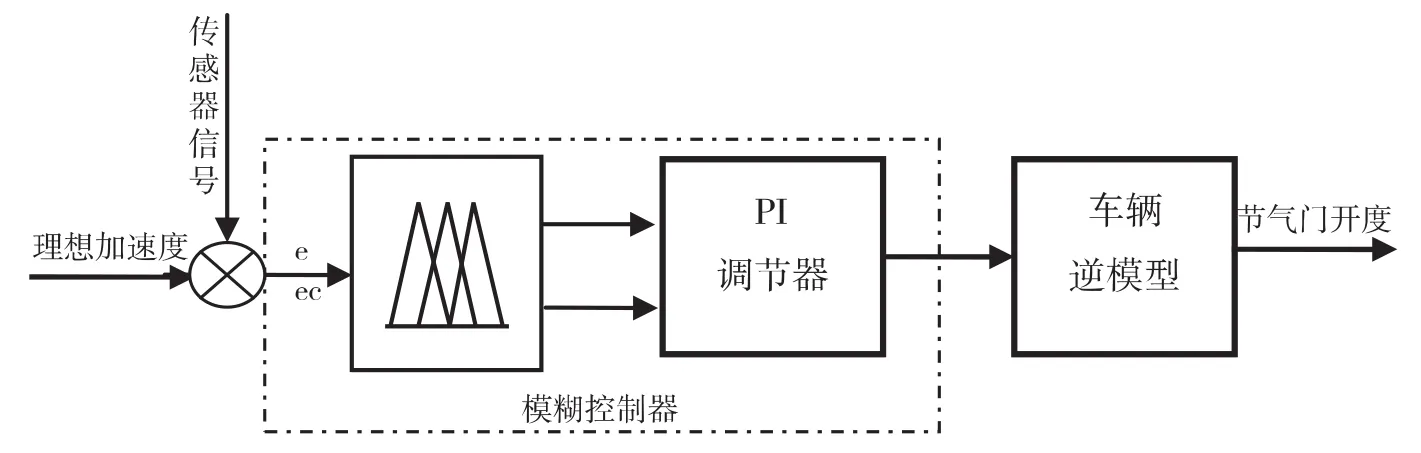
图3 下位控制系统器结构图
模糊控制的输入、输出变量分别为偏差e和偏差变化率ec,输出量为U。e的论域取为[-10,10],ec的论域取为[-1,1],U 的论域取为[-5,5],它们的状态分别是负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB)。语言值的隶属函数选择三角形的隶属度函数。模糊推理规则如下:if e=NB and ec=NB then kp=PB以此类推。由于采用了Mamdain型模糊控制器,模糊推理采用Mamdain推理,解模糊采用缺省值:重心法。Mamdain控制规则见表1。
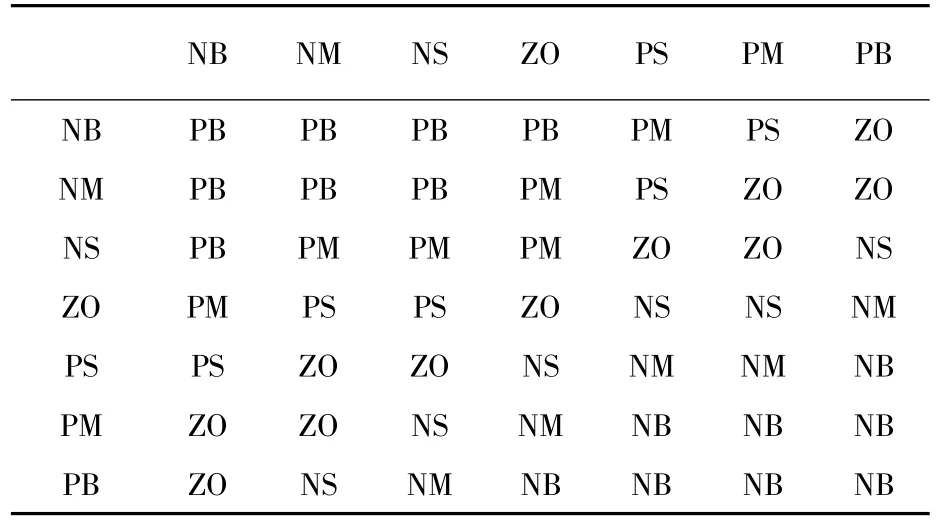
表1 下位控制器控制规则
3 仿真和实验研究
本文首先利用Matlab/Simulink软件进行仿真研究,系统仿真图如图4。与采用传统PI控制器进行对比,仿真结果如图5。然后在硬件在环仿真试验台上进行实验研究,采用了两种实验工况,分别为前车阶跃加速度工况(工况1)和前车正弦加速度工况(工况2)。其中,工况1中初始车辆加速度为0,初速度为10 m·s-1,10 s后加速度阶跃为0.5 m·s-2,后车初始车速为10 m·s-1,车间距离为40 m。工况2中前后车速皆为20 m·s-1,前车加速度为±0.5 m·s-2正弦加速度,初始车间距离为60 m,实验结果如图6,曲线1为前车运动参数曲线,曲线2为本车响应曲线。
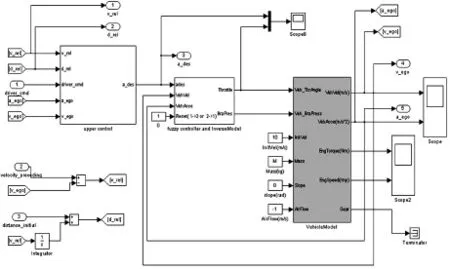
图4 系统的仿真图
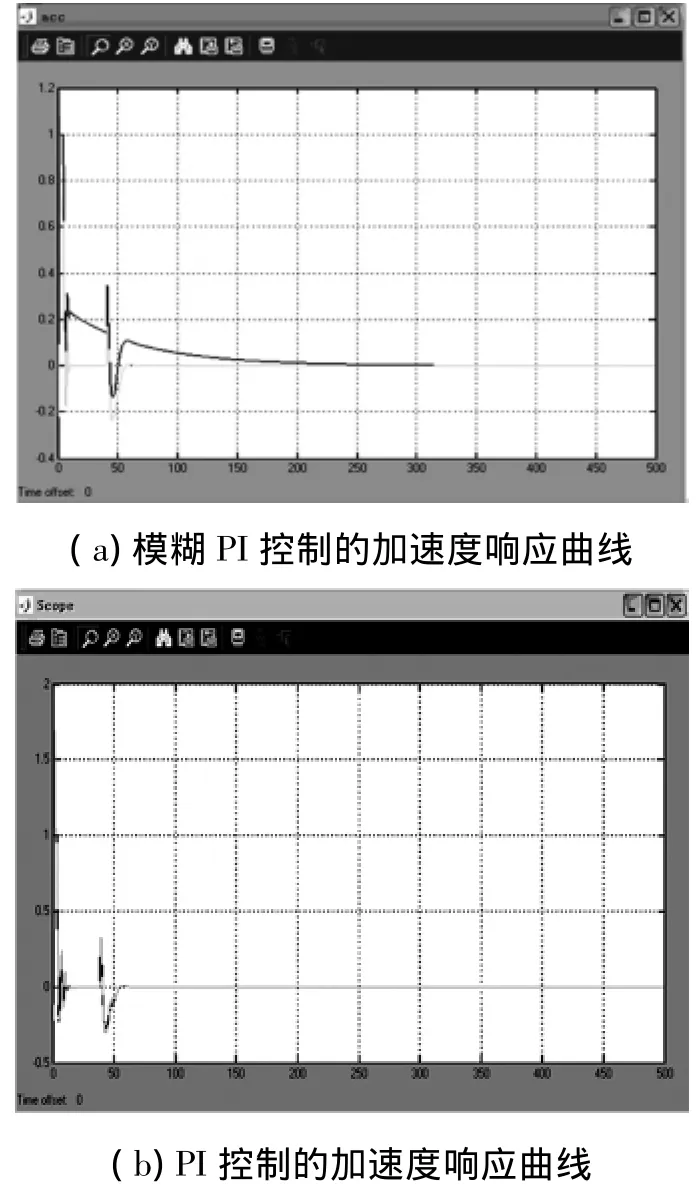
图5 加速度响应曲线
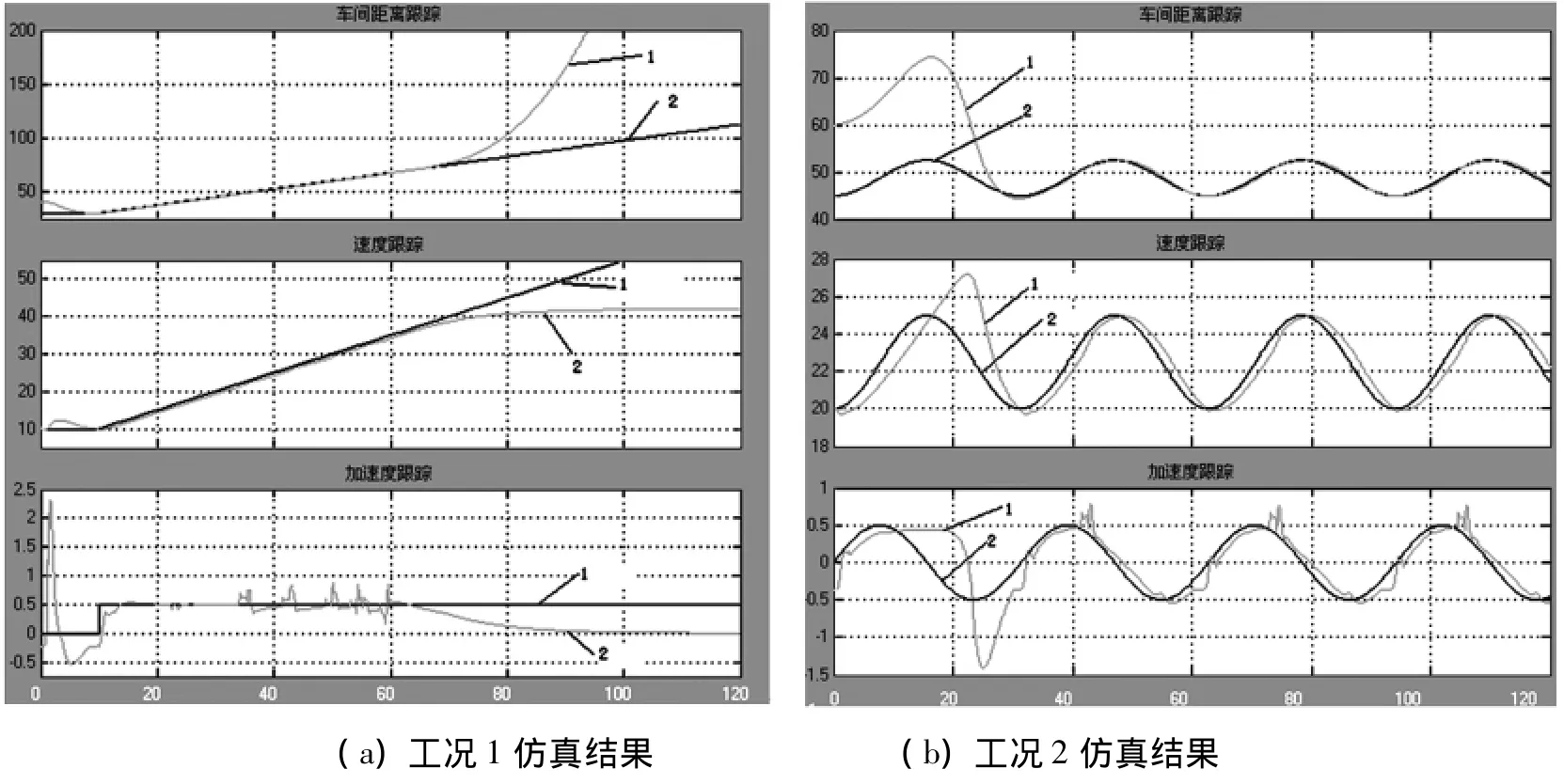
图6 不同工况下基于硬件在环实验结果
由图5可以看出,与常规PI控制相比,采用模糊PI控制策略后,系统的性能指标有了很大提高,响应的上升时间和调节时间大幅缩短、超调量也较小,表明该系统具有更好的跟踪性能。由图6的工况1中可以看到,在有效车距范围内(前70 s),被控车辆具有良好的巡航跟踪性能,其车速与加速度与前车基本一致且振荡较小,70 s后,车辆速度超过上限,自动退出跟车巡航控制,切换至定速巡航控制;工况2中,当前车进入有效车距范围,车辆始终处于跟车巡航模式,而且,两种工况下,被控车辆的车速和加速度均具有良好的跟踪性和平稳性。
4 结语
本文针对车辆巡航问题进行研究,设计了一种分层控制,其中上位控制系统实现了定速巡航和跟车巡航两种模式的自适应切换,下位控制系统利用了模糊PI控制策略来提高车辆巡航系统的控制性能及控制精度。最后,进行了Matlab/Simulink仿真与硬件在环实验研究,结果表明该巡航系统具有自动切换功能,并且提供了较高控制精度和理想的跟车精度,该系统提高了汽车巡航的稳定性,减轻了驾驶者的疲劳程度。
[1]于万海.汽车定速巡航控制系统应用与发展趋势[J].汽车与配件技术与应用,2012,1(1):20-21.
[2]苏玉刚,邓彬,黄剑,等.AMT车辆自动巡航系统智能控制技术[J].重庆大学学报:自然科学版,2007,30(1):77-80.
[3]杨洁芳,陈开考,周胜利.基于单片机的汽车巡航控制仿真系统设计[J].科技通报,2012,28(5):151-155.
[4]仇成群,刘成林,沈法华,等.基于Matlab和模糊PID的汽车巡航控制系统设计[J].农业工程学报,2012,28(6):197-201.
[5]尤洋.汽车自适应巡航系统自调整因子模糊控制器的优化控制[D].长春:吉林大学,2012.
[6]裴晓飞,刘昭度,马国成,等.一种汽车巡航控制的分层控制算法[J].北京理工大学学报,2012,32(5):479-483.
[7]李以农,冀杰,郑玲,等.智能车辆自适应巡航控制系统建模与仿真[J].中国机械工程,2010,21(11):1374-1380.
