基于退偏效应的尾流激光探测与寻迹方法
2013-09-19晶1航1王培南2
田 晶1, 陈 航1, 王培南2
基于退偏效应的尾流激光探测与寻迹方法
田 晶, 陈 航, 王培南
(1. 西北工业大学航海学院, 陕西西安, 710072; 2. 西安电子科技大学技术物理学院, 陕西西安, 710071)
利用不同尺度气泡与海水介质对激光散射后退偏状态的差异性进行尾流检测并实现尾流寻迹。仿效声尾流导引的模式, 通过尾流中不同密度、尺寸气泡群与海水水体的分辨达到对尾流边缘区域的识别。试验结果表明, 本文的方法能够有层次地分辨不同密度、尺度气泡散射体和海水介质的回波信号, 并反映出气泡密度对散射光退偏效应的敏感性。试验结果具有一定的规律性, 表明该方法可以实现探测器对进出尾流的甄别。
尾流; 退偏效应; 激光探测; 寻迹
0 引言
当今尾流制导已成为现代反舰的重要方法, 其中如何提高尾流检测灵敏度, 优化尾流导引弹道已成为提高尾流制导性能的关键技术。尾流信号检测灵敏度越高, 鱼雷在更远的距离上捕获到和跟踪上目标舰船尾流从而发现目标的概率就越高。近年来, 激光尾流探测技术由于其检测灵敏度高, 稳定性好, 以及较强的反隐身能力被越来越重视。传统的基于光散射强度进行尾流探测的方法, 如距离选通法、窄带滤波法等, 由于易受到环境背景光和水体散射的干扰, 对进一步提高尾流探测的灵敏度和可靠性产生了一定的影响。而一种基于散射光退偏效应的尾流激光探测方式, 由于在传统强度探测方式的基础上增加了偏振信息量, 能够有效区分海水散射光以及环境背光对探测信号的干扰, 可获得更高的尾流探测精度。目前, 这种方法的效果已在实验室条件下得到了证实, 并得到了学术界的肯定。
远距离尾流中的气泡密度低, 主要是150 µm以下的小尺度气泡群, 在这种条件下的尾流声探测非常困难, 而基于光散射强度的尾流探测方法又因受到水体自身散射的严重干扰而不能很好辨识尾流舷别信息的难题。利用退偏效应的尾流激光探测方法能够在一定程度上解决上述问题。有关小尺度、低密度气泡群的探测已在相关文献中阐述, 本文着重分析退偏效应的尾流激光寻迹方法, 通过尾流中不同密度气泡群、海水水体的分辨达到对尾流边缘区域的识别。
1 尾流激光探测模型
1.1 尾流模型
尾流通常被认为是从舰船尾端开始成锥形扩散分布的, 在舰尾初的宽度约为舰宽的一半。在最初一段距离内锥形扩散角在30~60之间, 舰船类型对该角度的影响较小。尾流扩散超过到一定距离时, 该扩散角急剧减小, 一般可认为扩散角以1的角度向外扩展, 此时的宽度约为舰艇宽度的2.5倍; 超过L距离后以确定速度向两边扩散; 当继续扩散较长一段时间后只有小气泡在尾流中存活数小时形成远距离尾流, 尾流边缘已经较难辨识。图1为近距离尾流几何模型顶视图和侧视图, 图中为有效尾流长度,H为尾流最大厚度,h为舰船吃水深度。
1.2 激光探测器布置方式
可以在雷体剖面上布置3个探测器同时进行尾流气泡的探测, 利用气泡密度对散射光退偏效应的敏感性, 判断雷体是否处于尾流边缘, 从而进行弹道调整。图2(a)所示为探测器在鱼雷头部的布置示意图, 在雷体剖面的左、中、右方各设置一组激光探测器, 激光器放在如图2(a)3个方向上, 左右2个探测器的光学轴线相对于垂直向上的轴线保持一定的角度, 形成指向3个方向的检测通道。
(a) 探测器的布置方式
(b) 光尾流探测方式
图2 尾流探测模型
Fig. 2 Schematic of wake detection model
当探测器进入尾流并处于尾流区的下方时, 左右2个探测器以及中间探测器皆能接收到尾流信号, 当鱼雷左入尾流时, 则左面的基阵首先检测到回波信号; 当鱼雷右入尾流时, 则右面的基阵首先检测到回波信号; 当鱼雷位于尾流中时则3个基阵,,都能检测到尾流信号; 当鱼雷位于尾流中心时, 则中间基阵接收到的信号强度最大, 两边基阵,接收到的信号近似相等; 当鱼雷位于近距离尾流区域中心时,这种判别方法依旧适用, 并且两边基阵接收到的信号也近似相等, 但是与中间基阵接收到的信号与两边基阵接收到的信号强度差距减小。
2 试验及结果分析
为证明本激光探测器布阵方式的可行性, 进行了试验平台搭建, 图3是模拟尾流气泡群激光散射强度和退偏探测试验系统平台。系统光源为脉冲激光器(波长532 nm)输出某一方向占优势的线偏振激光, 功率约10 mW。气泡尺度根据需要利用气泡发生器可控制在10~150mm(模拟远距离尾流特征, 远距离尾流主要由小气泡组成)以及主要气泡尺度为大于150mm(模拟近距离尾流特征)的气泡群。在接收信号位置放上测偏装置, 主要接收散射后回波信号的偏振光, 激光通过水槽时, 其中一部分激光会被水体和气泡幕反射回来, 试验令激光检测装置距气泡发生器的中心距离分别为=11 cm,=38 cm,=58 cm, 每次激光在这些位置探测时以相同的接收偏振状态进行接收等, 目的是在入射光强及气泡发生器气压相同的条件下对距尾流中心不同位置(不同密度)的气泡群尾流进行识别。
试验共分3组, 在入射光强相同, 距气泡发生器中心位置不同等前提下, 试验1测量了激光通过微小气泡水域(气泡尺度10~150mm)的散射光在同一偏振态下散射强度(见图4); 试验2测量了激光通过大气泡气群(气泡尺度>150mm)的散射光在同一偏振态下散射强度(见图5); 试验3测量了激光通过近距离尾流、远距离尾流散射后接收的某偏振光分量(见图6)。每一组试验都与各自相同条件下的静水散射光偏振分量进行对比, 从而确定是否可以成功区分目标信号与水体散射信号, 验证此种布阵方法的可行性。
1) 由图4可知, 对于远距离尾流(微小气泡群10~150mm)入射激光越靠近尾流气泡群中心,其发射激光对应的接收基阵所接收到的偏振分量光强越强, 距尾流气泡群中心越远(如为38 cm, 58 cm时), 偏振激光强度越弱。
2) 由图5可知, 对于近距离尾流(主要大气泡)入射激光越靠近尾流中心, 对应基阵接收到的偏振分量光强越强, 距尾流中心越远(如为38 cm, 58cm), 接收到的激光强度越弱, 光强递减幅度较微小气泡群(10~150mm)强。
3) 由图6可知, 对于大气泡尾流以及微小气泡尾流在距离尾流中心相同位置如11cm时, 在同一接收状态下, 接收到的某方向偏振光强有所不同, 大气泡光强较强, 小气泡光强较弱。
4) 每一组试验结果都与各自相同条件下静水偏振分量散射强度做了对比, 从图4~图6中所标注的静水曲线信号可见, 静水条件下水体回波信号强度在这种测试方法下总是最弱, 与有尾流(气泡)的水域退偏回波信号强度差别较大。
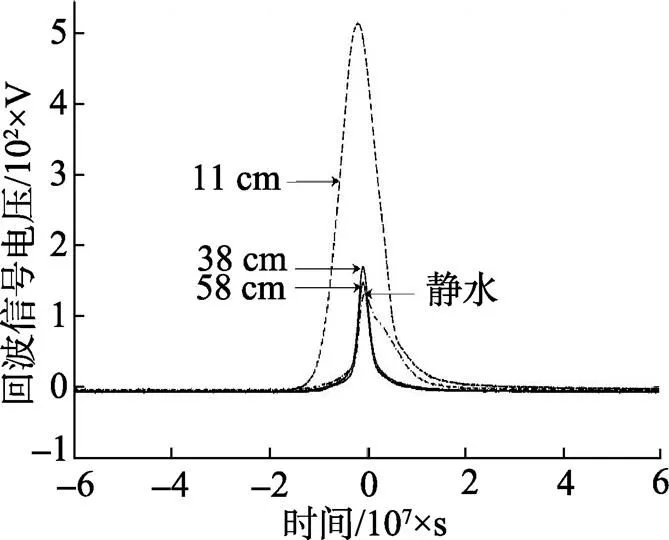
图5通过大气泡气群的散射光在同一偏振态下散射强度
综上分析可知, 试验验证了本设计的可行性, 由于尾流气泡群中心气泡密度较大, 尾流边缘密度较小呈正态分布, 因此, 试验室模拟了真实尾流的分布状况, 并在不同密度气泡的位置(11 cm, 38 cm, 58 cm)分别放置了相同入射光强的激光器和相同型号的探测器, 在相同入射光强下测得不同位置、不同大小气泡群所得到的激光散射后在同一偏振态下偏振分量强度不同, 具有明显的规律性, 显示无气泡(静水)条件下回波信号强度最弱。试验验证了本方法的可行性。
3 结束语
本文在采用偏振光探测尾流研究的基础上提出了一种基于退偏效应的尾流激光探测与寻迹方法, 在某个接收的偏振状态下, 可以清晰的区别尾流的舷别信息, 利用这一信息可以对鱼雷激光尾流自导的寻迹和跟踪弹道进行优化, 从而有效降低水体自身散射干扰。试验证明, 该方法既能检测远距离尾流又能检测近距离尾流, 解决了声探测方法对远距离尾流检测困难的难题, 又克服了传统光尾流探测受水体自身散射等干扰严重的情况。可以看出,舰船尾流退偏探测与寻迹具有良好的应用前景, 将大大提高舰船尾流的探测距离和导引精度。
[1] Fournier G R, Bonnier D, Forand J L, et a1.Range-gated Underwater Laser Imaging System[J]. Optical Engineering, 1993, 32(9): 2185-2190.
[2] 刘继芳, 雷卫宁, 冀邦杰. 光检测尾流特征中抑制背景干扰的方法[J]. 鱼雷技术, 2007, 15(2): 25-27. Liu Ji-fang, Lei Wei-ning, Ji Bang-jie .Restraint Method of Background Interference for Detection of Light Wakes [J]. Torpedo Technology, 2007, 15(2): 25-27.
[3] Tian Jing, Chen Hang, Qu Xiao-xi. Study on Far-Field Scatter of Ship Wake for Micro-Bubbles Based on CST[C] //Applied Mechanics and Materials. Switzerland: Trans Tech Publications, 2012: 226-228, 2042-2045.
[4] 田晶, 陈航, 许望洋. 舰船尾流微气泡光偏振特性分析[J]. 西北工业大学学报, 2013, 31(1): 129-132. Tian Jing, Chen Hang, Xu Wang-yang. Some Useful Results for Detecting Ship Wake Obtained from Depolarization of Light Scattered from Mcro-Bubbles[J]. Journal of Northwestern Polytechnical University, 2013, 31(1): 129- 132.
[5] 陈航, 田晶, 戚茜. 一种基于退偏效应的激光尾流信号检测方法[J]. 光电子×激光, 2013, 24(8): 1563-1568.
Chen Hang, Tian Jing, Qi Qian. A Detection Method on Laser Ship Wake Guidance Signal Based on Depolarization[J]. Journal of Optoelectronics Laser, 2013, 24(8): 1563-1568.
[6] 孙春生, 张晓晖, 朱东华. 气泡数密度对尾流光束衰减测量的影响[J]. 光子学报, 2009, 38(6): 1515-1517. Sun Chun-sheng, Zhang Xiao-hui, Zhu Dong-hua. Influence of Bubbles Number Density on Measurement of Beam Attenuation in Ship Wakes[J]. Acta Photonica Si- nica, 2009, 38(6): 1515-1517.
[7] Gimmestad G G. Reexamination of Depolarization in Lidar Measurements[J]. Appled Optics, 2008, 47(21): 3795- 3798.
[8] 张字文. 鱼雷弹道与弹道设计[M]. 西安: 西北工业大学出版社, 1999: 382-399.
[9] 李腾龙, 何俊华, 谢正茂,等. 尾流气泡参数测量系统的光学设计[J]. 红外与激光工程, 2012, 41(9): 2469- 2471. Li Teng-long, He Jun-hua, Xie Zheng-mao, et al. Optical Design of Wake Bubbles Measurement System[J]. Infrared and Laser Engineering, 2012, 41(9): 2469-2471.
[10] 朱东华, 张晓晖, 顾建农. 舰船尾流及其气泡数密度分布的数值计算[J], 2011, 32(3): 316-318.Zhu Dong-hua, Zhang Xiao-hui, Gu Jian-nong.merical Calculation of Ship Wake and Its Bubble Number Density Distribution[J]. 2011, 32(3): 316-318.
(责任编辑: 杨力军)
Tracing and Laser Detecting Ship Wake Based on Depolarization Effect
TIAN Jing, CHEN Hang, WANG Pei-nan
(1. College of Marine Engineering, Northwestern Polytechnical University, Xi′an 710072, China; 2. School of Technical Physics, Xidian University, Xi′an 710071, China)
The purpose of this paper is to find a method for accurately detecting and tracing ship wake by making use of the difference of depolarization states due to laser scattering of bubbles with different scale and seawater. Imitating acoustic wake guidance mode, ship wake edge region is recognized through identification of the bubbles with different density and scale from sea water. Experiment results show that this method clearly distinguishes these echo signals, and displays the sensitiveness of bubble density to depolarization effect of scattered light. These results show certain regularity, which infers that this method can be used to accurately and clearly distinguish ship wake.
ship wake; depolarization effect; laser detection; tracing
TJ630.34; TN247
A
1673-1948(2013)06-0414-04
2013-04-10;
2013-05-23.
西北工业大学研究生创业种子基金(Z2012002).
田 晶(1986-), 女, 在读博士, 研究方向为光尾流导航与制导技术研究.
