连铸机结晶器振动液压系统通用模型分析
2013-09-17黄松许益民杜昌元周飞宜房小立
黄松,许益民,杜昌元,周飞宜,房小立
(武汉科技大学机械自动化学院,湖北武汉430081)
连铸机结晶器振动的目的是防止拉坯时坯壳与结晶器粘结而发生粘挂拉裂或拉漏事故,以获得良好的铸坯表面质量。结晶器振动系统采用液压技术后,可方便调整振动参数,使结晶器振动装置结构简单,传力均匀,提高了产品质量。
1 结晶器振动液压系统原理图
图1所示为连铸机振动液压控制系统原理图。

图1 连铸机振动液压系统原理图
该振动液压系统主要由位置传感器、液压缸、伺服阀、控制器和放大器及负载等组成。取系统参数为:活塞杆直径d=80 mm,油缸行程s=20 mm,液压缸活塞直径D=135 mm,负载质量m=18.47 t。位置传感器量程ls=0~20 mm,对应输出信号为usf=4~20 mA,伺服阀型号为D634-514A。
连铸机振动液压控制系统本质上是位置控制系统,其传递函数方框图如图2所示。
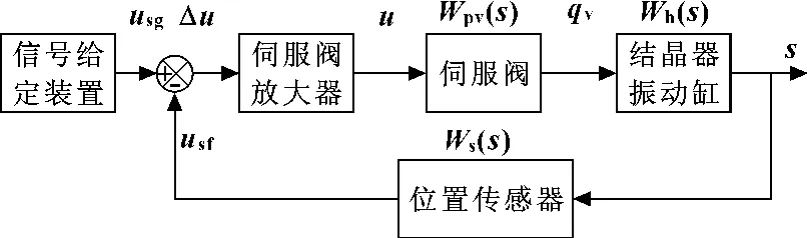
图2 结晶器振动液压系统传递函数方框图
2 位置控制系统建模与分析
2.1 位置控制系统执行元件建模与分析
工程上将忽略弹性负载时液压缸和被控制对象看作为一个二阶环节与积分环节的组合。该组合的传递函数为:

式中:ωh为液压缸 -负载质量系统的固有频率(rad/s),ωh=232.7 rad/s;
δh为液压缸-负载质量系统的阻尼比,取值δh=0.15;
Ah为液压缸的有效作用面积,计算得

2.2 伺服阀建模与分析
在工程实际问题中,将伺服阀看作一个二阶环节。带有比例放大器的伺服阀的传递函数为:

式中:Kq1为伺服阀的负载流量增益(m3/(s·A)),Kq1=0.13 m3/(s·A);
ωv为伺服阀的相频宽 (rad/s),ωv=251.2 rad/s;
δv为伺服阀的阻尼比,取δv=0.5。
2.3 位移传感器建模与分析
位移传感器频宽比伺服阀频宽高很多,因此使用比例环节来表示。位移传感器增益为:

2.4 控制器增益的确定
执行元件活塞缸的增益:

由电压信号0~±10 V转化为电流信号0~±10 mA的增益为:K0=0.001 A/V。
按系统的稳定性要求,初步求解闭环系统开环增益的最大值Ksmax,该公式由劳斯稳定判据确定:
式中:ξ为系统阻尼比。工程实践中,ξ=0.05~0.2,文中计算取ξ=0.1;
ωomin为液压缸的固有频率最小值 (rad/s),ωomin=237.2 rad/s。
代入参数得:

Ks的最终值是由调试确定的,将最大增益Ksmax=47.44/s代入计算,可得出比例环节的最大增益为:

上式计算得出的闭环系统开环增益是系统增益的最大值,比例环节的增益Kps也是最大值,该增益是保证系统达到临界稳定时的最大值。但在实际系统中还要有足够的稳定裕度,该系统调试值为Kps=6,文中采用此值作为比例环节的增益。
2.5 连铸机位置控制系统传递函数方框图
综合图2及第2.1—2.4节得到图3所示的连铸机位置控制系统传递函数方框图。

图3 位置控制系统传递函数方框图
3 连铸机液压控制系统动态仿真与分析
3.1 连铸机液压控制系统动态仿真结果
运用Simulink软件对图3所示位置控制系统传递函数进行仿真分析,图4为结晶器位置控制系统阶跃响应曲线,图5为结晶器位置控制系统频率响应曲线。

图4 结晶器位置闭环控制系统阶跃响应曲线

图5 结晶器位置闭环控制系统频率响应曲线
3.2 连铸机振动液压控制系统动态仿真分析
影响连铸机振动液压控制系统性能的因素有很多,如油缸固有频率、温度和PI、油液介质的弹性模量、泄漏系数、阀的响应频率等,文中主要分析PI参数对系统动态性能的影响。图6为采用PI校正的位置控制系统传递函数方框图。

图6 采用PI校正的系统传递函数方框图
当Ti为0.2时,kp采用不同参数时系统性能如表1所示。

表1 kp对系统性能影响 (Ti=0.2)
从表1不难看出:随着kp值的逐渐增加,相位裕量γ、幅值裕量K、调整时间t在逐渐减小,系统的快速性在提高,稳定性在下降。
当kp为0.5时,Ti采用不同数值对系统性能的影响如表2所示。
从表2不难看出:随着Ti值的逐渐增加,相位裕量γ、幅值裕量K在逐渐减小,调整时间t在某一个值时最小。
当kp=0.1、Ti=3.9时,系统幅值裕量K=28.1 dB,相位裕量γ=32.3,调整时间t=0.9 s,系统动态性能最优。
4 结论
得到了连铸机结晶器振动液压控制系统的通用模型,采用的分析方法对连铸机结晶器系统的分析具有普遍的指导意义。
【1】陶磊.结晶器调宽油缸性能分析及其试验台设计[D].沈阳:东北大学,2007.
【2】YANG Bo,LI Wanzhou,WANG Jingchun,et al.Position Servo Control of Industrial Heavy-load Hydraulic System[J].Control Theory & Applications,2010,27(1):121 -125.
【3】许益民.电液比例控制系统分析与设计[M].北京:机械工业出版社,2005.
【4】梁利华.液压传动与电液伺服系统[M].哈尔滨:哈尔滨工程大学出版社,2005.
