轴向柱塞泵变量机构的数学建模及控制系统仿真分析
2013-09-17郭杰刘广瑞
郭杰,刘广瑞
(郑州大学机械工程学院,河南郑州450001)
轴向柱塞泵是液压系统中常用的动力元件,在工业领域有着广泛的应用。伴随着信息技术的发展,轴向柱塞泵的数字化控制是未来的发展趋势。而对轴向柱塞泵变量机构系统进行数学模型的建立和控制仿真,是分析其动态性能和实现轴向柱塞泵数字化控制的前提和基础。
文中分析的CY14-1B轴向柱塞泵是我国自主研发的、应用广泛的轴向柱塞泵,对其变量机构控制进行研究,有很好的经济意义和理论价值。
1 轴向柱塞泵变量机构工作原理
CY14-1B轴向柱塞泵变量机构的结构如图1所示,油泵出口的压力油经p通道进入变量活塞4的下腔d,当伺服阀芯1向下运动时,通往上腔g的阀口打开,液压油通过通道e进入变量活塞的上腔,由于上腔活塞的受力面积大于下腔的面积,变量活塞将向下运动,这时通过销轴2连接在变量活塞上的斜盘3将随变量活塞的运动而改变倾角。同样,当伺服阀芯1向上运动时,通道f与上腔接通,上腔的液压油在下腔d压力的作用下将通过通道f流入油箱,这样变量活塞将向上运动,从而带动斜盘改变倾角。
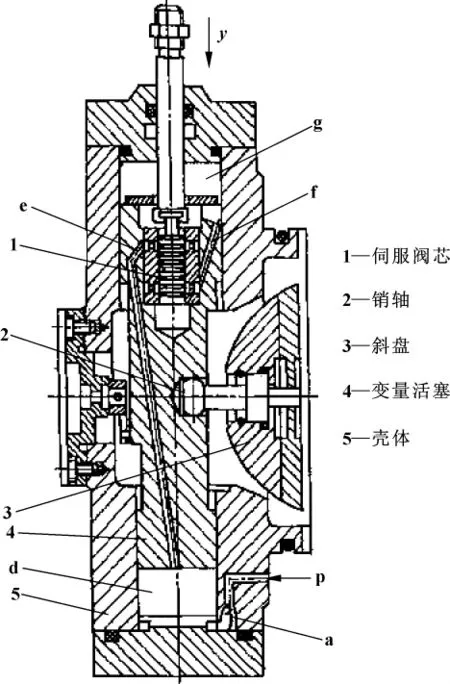
图1 CY14-1B轴向柱塞泵变量机构结构图
2 变量机构的数学建模
由上述介绍可知,变量泵的变量机构,可以简化为一个三通阀控的差动液压缸,其中变量活塞的运动也会带动伺服阀体的运动,这样伺服滑阀的开度是阀芯的运动与变量活塞运动的线性叠加,其物理模型可以简化成如图2所示。
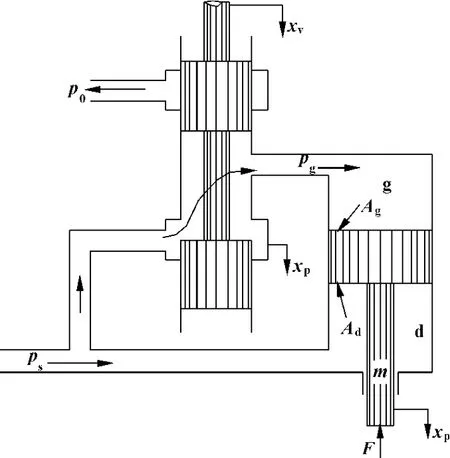
图2 轴向柱塞泵变量机构物理模型图
其中外力F为斜盘施加给变量活塞的外力,方向与活塞的运动方向相反,其大小受负载影响,在该系统中它属于负载干扰。pS和p0分别为变量泵出口压力和油箱液体压力,其中p0≈0。
2.1 系统动力学方程的建立
由图可知阀口开度与阀芯位移xv和活塞位移xp的关系式为:

其中:x为阀口的开度。根据滑阀的流量方程:

其中:Cd为孔口流量系数,Δp为阀口前后的压力。使用泰勒展开将其线性化,得到增量形式的线性化流量方程:

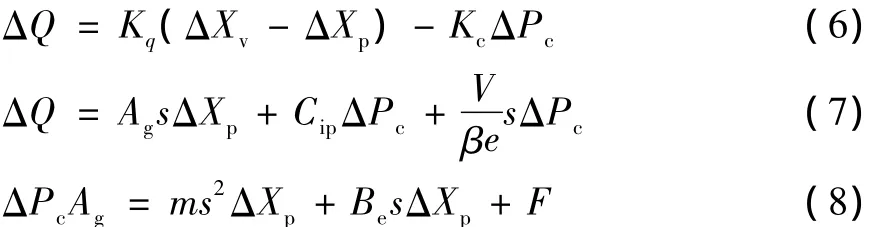
式中:Kq为流量增益,,Kc为流量-压力系数,。对系统的g腔应用流量连续方程,同时考虑到液体的可压缩性和内部泄漏问题,可得:

式中:Cip为液压缸控制腔的内部泄漏系数,βe为液压系统的综合弹性模量。根据系统的动力学特征,可建立变量活塞的动力学平衡方程为

式中:Be为活塞与负载的黏性阻尼系数,m为变量活塞的质量,可假设供油压力ps为常数,因此方程(3)、(4)、(5)的增量拉普拉斯变换分别为:
2.2 变量机构传递函数的建立
由以上的拉普拉斯方程,可以画出系统的传递函数方框图,如图3所示。

图3 变量机构传递函数方框图
由传递函数方框图可知,系统的输入由两部分线性叠加而成,分别为阀芯的位移量和干扰外力的作用,输出为变量活塞的位移量。由拉普拉斯增量方程(6)、(7)、(8),消去中间变量ΔQ和ΔPc,即控制腔的流量增量和压力增量,可以得到输入和输出之间的关系式,经过计算可得:


令Kh为液压弹簧刚度:
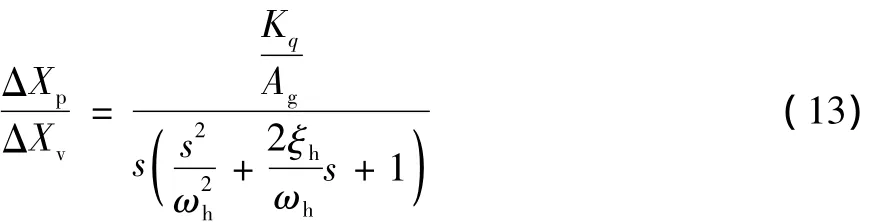
式中:ωh为液压固有频率,;ξh为阻尼比,;ω1为一阶微分环节的转折频率,式 (10)可分解为伺服阀芯的位移量所对应的输出和外力作用下的输出,其分别对应的传递函数为:

限于篇幅,文中着重讨论阀芯位移对系统输出的影响及其控制性能的分析。
3 变量机构的控制性能分析和仿真
在对控制系统的仿真和分析中,以MATLAB为工具,结合系统的特点对系统进行分析。首先对系统本身的性能进行分析,然后为改善控制性能引入相应的校正装置。
3.1 阀芯位移与活塞位移传递函数的仿真和分析
由传递函数方框图可知,阀芯位移和变量活塞位移关系是一个有单位负反馈的闭环传递函数,这里首先画出系统的Bode图,分析系统的稳定性,由公式(11)可推导出其开环传递函数为:
可以看出系统为Ⅰ型系统,从而可以得知系统对于阶跃响应的稳态误差为0。
表1为系统的部分重要参数,将各个系数代入式(13)中,在MATLAB下进行仿真,可得到系统的Bode图,见图4。
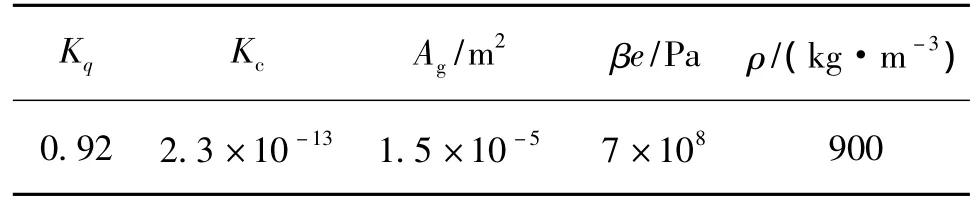
表1 部分相关参数表
根据Bode图,可以看出系统是相对稳定的,但是由于系统增益较大,系统的稳定性裕度较小,相位裕度和幅值裕度分别为7.49°和1.28 dB,因此一般情况下,系统的输入并不是阀芯的位移,而是通过一定的传动装置使阀芯移动,这样便可以降低系统的增益、提高系统的稳定性。
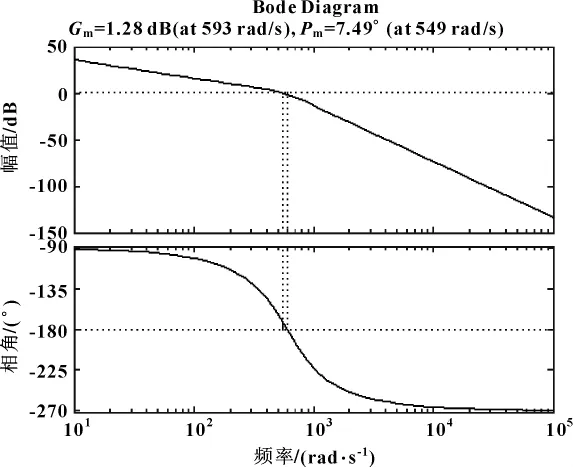
图4 变量机构开环传递函数Bode图
根据系统的闭环传递函数,经过仿真可以得到系统的单位阶跃响应,如图5所示。可以看出:系统存在着很大的超调量,振荡次数较多,调整时间也需要改善。因此,对于这样的系统,需要引入校正装置来改善系统的动态性能。
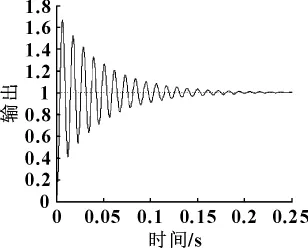
图5 系统阶跃响应图
3.2 引入PD校正的控制系统仿真和分析
为解决系统中存在的问题,这里首先对变量机构搭建一个简单的控制方案,即增加了对阀芯位移的传动装置和变量活塞位移的反馈。其系统闭环控制方案图如所图6所示。

图6 闭环系统的简单控制方案图
根据图6示的方框图,可以计算出闭环系统的传递函数为:
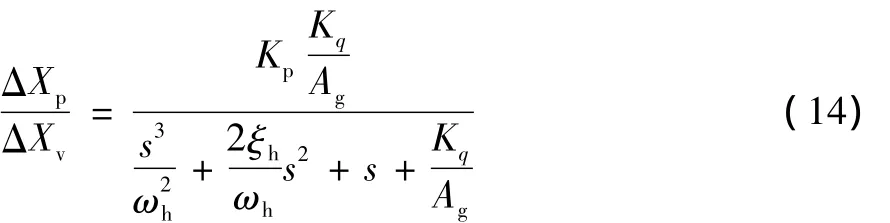
其实,增益Kp仅决定着输入与输出的幅值比,但是它的大小并不影响系统的开环增益。这样一来系统的控制性能并没有什么提高,只是搭建这样的控制系统就可以在变量机构外的控制系统中引入控制算法来改善系统的性能,这样就为不改变变量机构结构的情况下进行计算机控制打下了基础。下面将介绍系统的校正问题。
首先在上述控制系统的前向通道中加入比例校正环节,通过调整比例系数来观察其对控制系统性能的影响,增加了比例环节的控制系统传递函数为式(15),由于系统自身增益较大,这里取小于1的比例系数,这样系统的开环增益有所减低。
根据比例系数的不同,所得到的对应的开环传递函数的Bode图见图7。
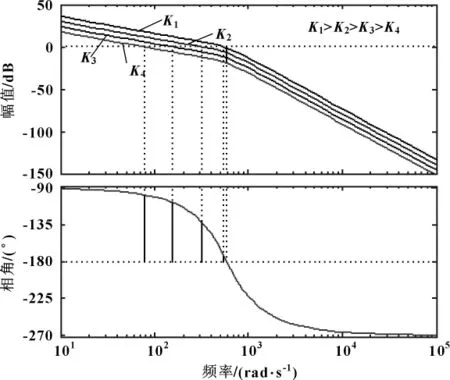
图7 不同比例系数所对应的开环Bode图
可以看出:系统的幅值裕度和相位裕度分别随着比例系数的减小而增加,这意味着系统的稳定性也随着提高。
不同比例系数下的阶跃响应如图8所示,可以看到:随着比例系数的减小,上升时间不断延长,系统的超调量显著降低,振荡次数减少,当比例系数降低到一定程度时系统不再出现振荡,而是单调上升。这也说明变量机构中的液压弹簧是一种动态弹簧,当系统缓慢运动时,同时由于液体泄漏的问题,抵消了液压弹簧的作用,这时的液压弹簧对系统基本没有影响。
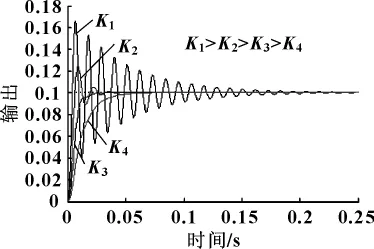
图8 不同比例系数所对应的阶跃响应图
综上所述,降低系统的开环增益,提高了系统的稳定性,也降低了系统的超调量,但系统的快速性却有了一定程度的降低。为提高系统的快速性,可以采用PD控制来实现。采用PD控制的系统闭环传递函数为:
这里以图8中K4做为PD控制的比例系数,通过凑试法来调整微分环节的时间常数,最后得到的阶跃响应如图9所示。可以看出:通过增加微分调节环节,系统的快速性有了很大的提高,调整时间也有所减少。

图9 PD控制的阶跃响应图
对应PD校正后的开环系统Bode图如图10所示,与图7中比例系数为K4的Bode图相比,系统的稳定有所提高。

图10 PD控制的开环系统Bode图
4 结论
通过对轴向柱塞泵的数学建模和控制系统仿真,所得到的结果基本符合变量泵的变量机构实际工作情况。但是由于线性化所带来的误差,以及滑阀的流量增益和流量压力增益在实际工作都不是一个常数等因素的影响,系统在大范围快速变化时,往往产生较大的误差;而在小范围变化时,系统能够很好满足一定控制性能的要求,在实际生产中有很大的意义。
【1】王庆国,吴建胜,范广民,等.微机控制数字变量轴向柱塞泵的研究[J].沈阳工业大学学报,1999,21(4):309-312.
【2】姚俊,马松辉.Simulink建模与仿真[M].西安:西安电子科技大学出版社,2002.
【3】关景泰.机电液控制技术[M].上海:同济大学出版社,2003.
【4】王庆玮.单片机控制数字变量柱塞泵的研究[D].沈阳:沈阳工业大学,2005.
【5】李东君.基于MATLAB SIMULINK非对称阀控非对称液压缸控制系统的仿真分析[J].机床与液压,2008,36(7):143-146.
