扩散炉自动上下料系统安全性设计
2013-09-17林伯奇罗于亮毛朝斌陈特超
林伯奇,罗于亮,毛朝斌,陈特超
(中国电子科技集团公司第四十八研究所,长沙, 410111)
扩散炉自动上下料系统安全性设计
林伯奇,罗于亮,毛朝斌,陈特超
(中国电子科技集团公司第四十八研究所,长沙, 410111)
介绍了一种用于卧式扩散炉的自动上下料系统,对自动上下料系统组成进行了介绍,着重讨论了系统的安全性问题,并对安全性提出了解决方案,该系统控制效果良好,能为电池片生产企业降低人工成本,提高生产效率,增强了设备的安全性,适合大规模电池片生产要求。
自动上下料系统;扩散炉;系统安全性
随着晶体硅电池产业的快速发展,电池片生产厂家为了降低人工成本,提高生产效率,增强设备的安全性,对电池生产设备的要求也不断提高。卧式扩散设备作为生产光伏电池的主要设备,其性能和生产效率尤其受到广大光伏电池生产厂家的关注,现在电池生产厂家要求提高扩散设备的自动化程度,提高人取放舟的安全性,同时要保证舟在放取的时候SiC桨和舟的安全性[1][2]。
因此,设计自动上下料系统时必须考虑系统运行的安全性。中国电子科技集团公司第四十八研究所为适应客户的新要求研制了一套用于扩散炉的自动上下料系统。这套系统能很好地提高扩散炉的自动化程度,同时也保证了设备和人的安全。
1 系统安全性分析
下面结合国内外现有的自动上下料系统进行安全性分析。图1为自动上下料系统,从图中可以看出,本系统是实现石英舟在桨上的自动装卸,因此,包括沿X轴方向运动的SiC桨在内,装卸系统是一个X、Y、Z三维立体运动系统。由于SiC桨、石英舟及硅片价格昂贵,因此系统的安全显得尤为重要。
首先是Z轴方向,卧式扩散炉一般是几根反应管竖直分层叠放,根据反应管的位置不同,装卸舟所要达到的高度也不同,机械手臂通过Z轴方向运动将舟在不同炉管与不同位置的缓存区间传递。因此,对应不同的高度需要有精确的位置检测,既要防止机械手臂过了所要求的位置却没有停止的情况,也要防止机械手臂没达到所要求的位置就停下来的情况。通过在所需的高度安装检测装置,结合电机的反馈信息能很好地实现Z轴方向的运动。
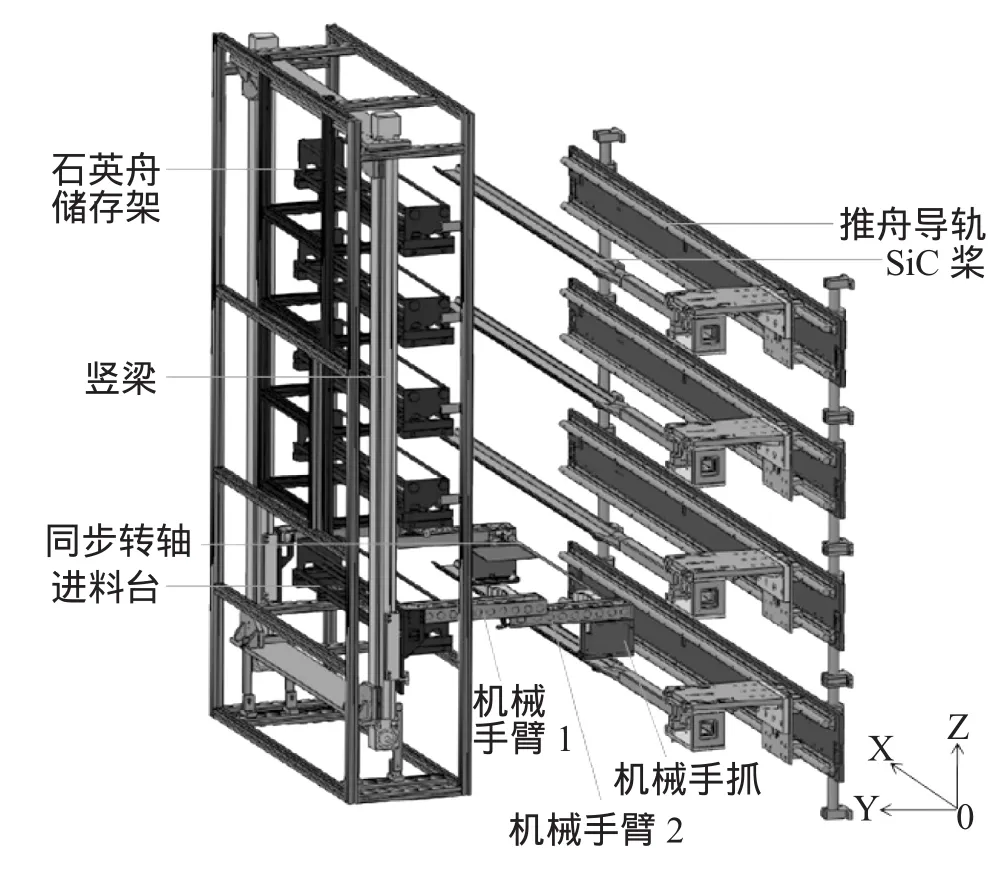
图1 自动上下料系统
在Y轴方向,机械手爪沿着Y轴方向运动,根据实践经验,几根反应管竖直分层叠放时不可能在同一竖直平面,因此相对应的SiC桨也不在同一竖直平面,有微小的差异。因此机械手爪对应每层Y轴方向运动的距离也是有差异的,这种微小的差异通过在机械手臂上安装位置检测装置是无法实现的。一般地,通过在在电机上安装旋转编码器,根据编码器反馈的信息来确定位置。这种方式只有在电机与传动机构连接完好的情况下能很好的实现。然而如果电机与传动机构连接出现异常,编码器却不能反应传动机构的实际运行情况,给系统带来了安全隐患。
在X轴方向,当机械手臂将舟放到SiC桨上时,SiC桨将舟送入反应管内,当工艺完成时,SiC桨将舟取出回到机械手臂取舟位置,再由机械手臂将舟取走。一般地,取放舟只是一个重复动作,对舟的位置不会造成影响,只需检测SiC桨的位置。实际上,软着陆扩散炉中工艺时舟与桨是分离的,也就是说SiC桨将舟送入反应管后,SiC桨是脱离舟退出反应管再进行工艺的。如果SiC桨没有调好或者其他因素可能导致桨与舟的相对位置发生变化,那么桨载舟出来后,舟就不能回到机械手臂放舟位置,机械手臂无法安全地取到舟。
3 M5111-5WK/UM自动上下料系统
3.1 自动上下料组成
本文研制的自动上下料系统为龙门结构,如图1所示。包括:沿竖直轴(Z轴)方向的龙门升降机;在水平面内沿Y轴方向运动的机械手臂;提舟用的机械手爪;石英舟储存架;进料台;控制系统。
龙门升降机结构由两根竖直安装的梁作为滑台,梁上有带刹车装置的驱动电机。龙门升降机用来执行垂直方向的运动,负责石英舟在进料台,扩散炉各管之间和石英舟储存架的垂直运动。
在水平方向设计两个机械手臂及取舟机械手爪,机械手臂分别固定在竖梁的两个滑台上,可沿Y轴方向前后运动;两个机械手爪采用同一个电机驱动,中间通过同步轴连接保证左右机械手爪动作一致。机械手爪成“L”型且相对设置在机械手臂的下部。机械手爪用于对进料台,储存架和SiC桨上的石英舟的抓取,并且能够在水平方向移动,配合龙门升降机完成石英舟的装卸。
竖梁的内侧还分别对称设有先向内再向前延伸而成的石英舟暂存区,石英舟暂存区的内侧设有两个放舟支架。用来对加工完毕的热石英舟进行冷却或在加工忙和出现故障时,对正在运输中的石英舟进行储存。
自动上下料系统通过独立的PLC控制,通过控制龙门升降机在滑台上下运动及机械手臂在Y轴方向运动,实现对石英舟的自动装卸。
3.2 控制系统安全性设计
图2为自动上下料控制系统框图,其中可编程控制器采用三菱FX3U80MT+FX2N16EX,控制控制龙门升降机在滑台上下运动及机械手臂在Y轴方向运动及系统的位置检测。而SiC桨上的对舟检测由扩散炉各管的控制系统检测,通过上位机将检测信息传送给自动上下料控制系统。下面着重讨论系统的安全性设计。
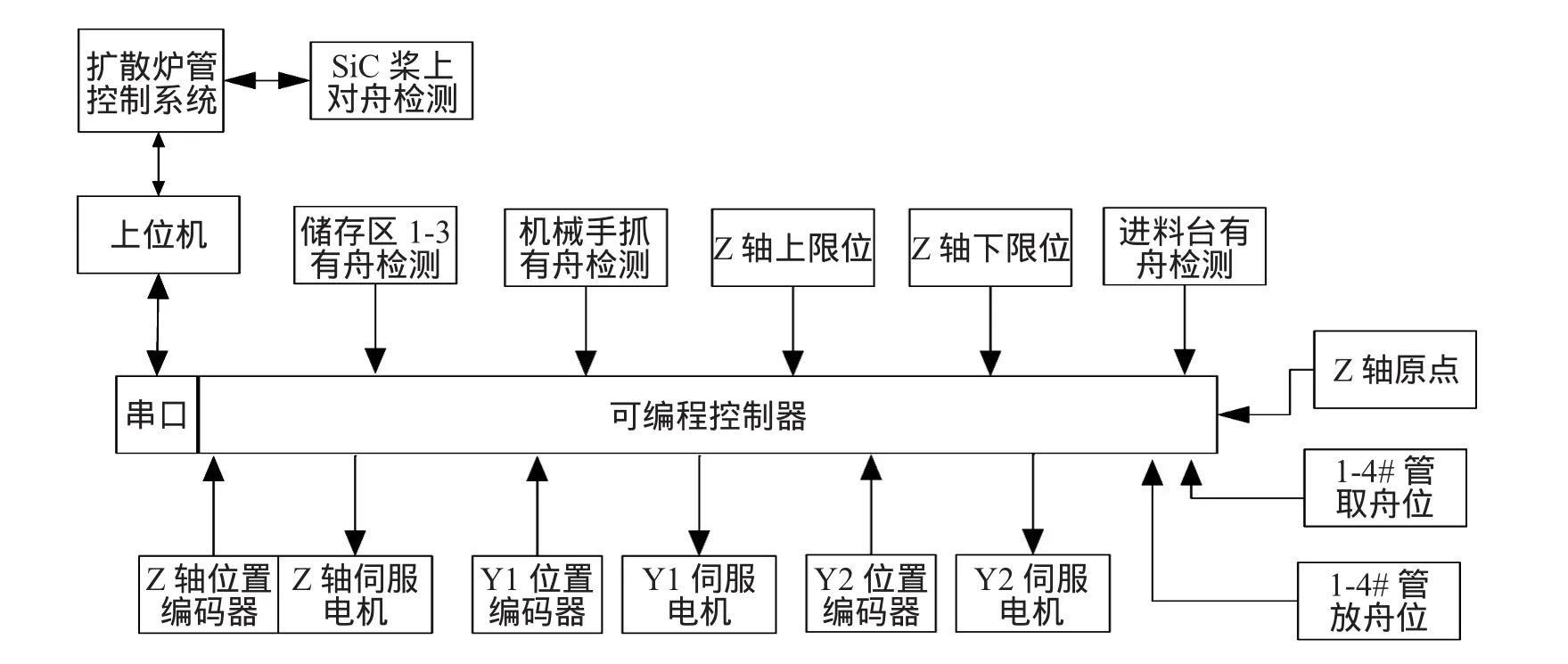
图2 控制系统框图
首先在Z轴方向的位置检测,在所需的高度将到位开关装置安装在竖梁上,如1#管的取舟位和放舟位。电机使用带有编码器的伺服电机。驱动电机配有刹车装置,能够保证在非工作状态下,滑块机构自锁,保证在掉电状态下石英舟的安全。其工作原理如图3所示,当升降机在长距离检测开关1运动到2时,在两开关之间升降机将高速运动,为防止在检测开关2过冲,在离检测开关2一段距离时升降机就须减速运行。升降机从检测开关1运行到检测开关2的过程为:升降机在检测开关1开始以3 000 mm/min运行,电机编码器同时计数,计数到距离检测开关2还有200 mm时,速度变为300 mm/min,当开关2检测到升降机,电机停止运行,如果在运行时间容差10 s内检测开关2没有检测到信号,系统发出报警信号进行人工干预。当升降机竖梁的两端装有限位检测开关,一方面作为调试过程中升降找原点的参考点,另一方面作为保证在生产过程中龙门升降机的安全。
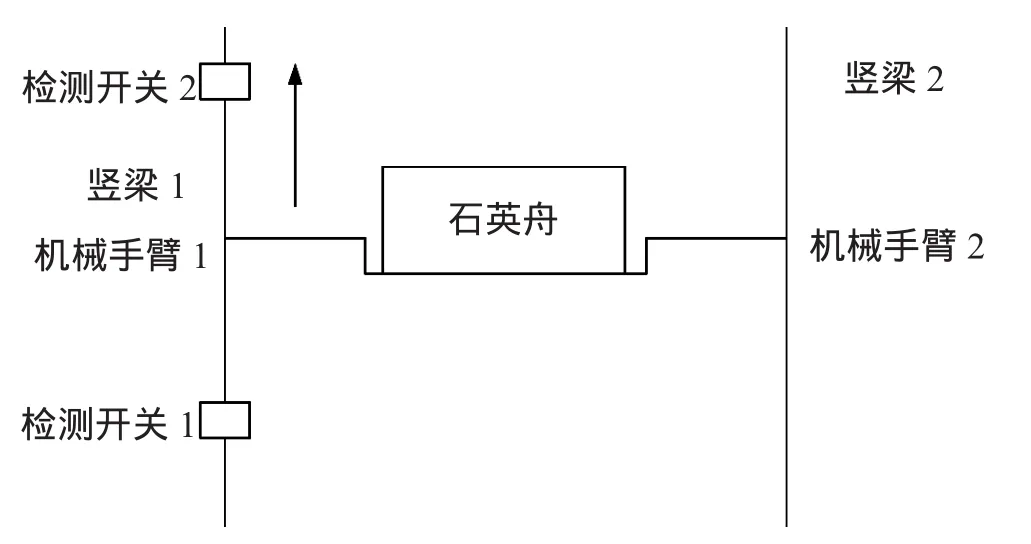
图3 升降机在Z轴方向运动原理图
在Y轴方向,机械手爪的位置检测靠独立编码器完成。在两个机械手爪之间的如图1所示同步转轴的从动一端安装编码器,实时反馈机械手爪的运行情况,如果运行时间在容差范围5 s内编码器没有检测满足所要求的计数量,认为系统出现故障,系统发出报警信号进行人工干预。在机械手臂与竖梁连接端安装一个检测开关作为机械手爪原点。
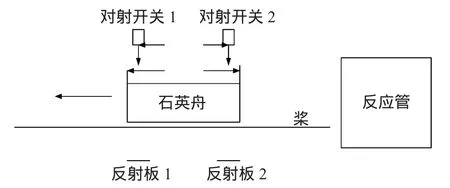
图4 SiC桨上对舟开关原理图
在X轴方向,SiC桨上对舟检测如图4所示,在扩散炉推舟底板上安装两个对射开关,检测到石英舟出炉后是否在两个对射开关之间,确定机械手爪是否安全取舟。其工作原理是当桨和石英舟从反应管退出时,对射开关2检测到石英舟,桨和舟继续退出直到对射开关1检测到石英舟,出舟运动立即停止,此时舟还在对射开关2的检测范伟内即舟在取舟安全范围内。如果舟停止后不是两个对射开关同时有检测信号,则认为系统故障,系统将发出报警信号进行人工干预。两个对射开关之间的距离与石英舟的长度容差范围小于5 mm,假设石英舟的长度为1 205 mm,那么对射开关的距离要大于1 200 mm,且小于1 205 mm,保证两对射开关都同时检测到舟。由于一般的光电开关发出的光有一定散射,很难保证石英舟的安全区域,在此选用欧姆龙的E3Z-Laser激光传感器。
机械手爪上有舟检测,通过在两个手爪上分别安装小型安全限位开关,只有当系统检测到两个开关同时作用时才确定机械手爪上的舟是安全的,如果只有一个机械手爪检测到有舟而5s后还没检测到另一机械手爪有舟,则认为系统出现异常,系统发出报警信号进行人工干预。限位开关采用柱塞式,只有当一定的重物压在机械手爪上时,开关才会作用,这样判断石英舟是否安全放在手爪上。
储存区和进料台的有舟检测同机械手爪上有舟检测原理相同。
4 结 论
M5111-5WK/UM型扩散炉自动上下料系统目前运行了将近两年,系统运行平稳。系统提高了扩散工序的自动化操作程度,减轻了对人工操作的依赖,避免了人工取放石英舟操作的随意性对扩散工艺的影响,而且可以排除因刚出炉的石英舟在高温时或在高处取放石英舟对操作人员带来的安全隐患。本文从系统的安全角度分析了自动上下料系统可能带来的安全问题,并提出了解决方案,保证了系统的安全可靠。
:
[1]向小龙,禹庆荣,文庚云,等.光伏行业扩散炉的技术现状及发展趋势[J].太阳能,2007(11):32-33.
[2]刘良玉,彭志坚.软着陆洁净闭管扩散炉研制[J].电子工业专用设备,2010,181:39-42.
The Automatic Loading and Unloading Diffusion Furnace System Safety Design
LIN Boqi,LUO Liang,MAO Zhaobin,CHEN Techao
(The 48th Research Institute of CETC,Changsha 410111,China)
Abstract:A kind of automatic loading and unloading system for horizontal diffusion furnace is mentioned in this dissertation,in which the security about this system is discussed and the resolution is produced especially.This system has good control effect,reduce labor costs ,increase productivity,and enhance the security of the device,which is suitable for large-scale solar cell production requirements.
Keywords:Automatic loading and unloading system;Diffusion furnace;System security
TN305
B
1004-4507(2013)07-0037-04
2013-06-16
林伯奇:(1969-),男,湖南武冈人,高级工程师。研究方向:半导体、光伏装备制造。