车辆压线检测方法
2013-09-14王建华徐贵力糜长军田裕鹏徐培智
王建华,徐贵力,糜长军,赵 敏,田裕鹏,王 彪,徐培智
(1.江苏省交通科学研究院股份交科院,江苏南京 211112;2.南京航空航天大学自动化学院,江苏南京 210016)
随着交通运输业的快速发展,汽车数量的急剧增加,各种车辆违章行为层出不穷,车辆压黄线属于一种严重的交通违章行为,用视频的方法检测车辆压黄线具有一定的实用价值。文中针对这个问题,提出了一种基于计算机视觉的车辆压线检测方法。
1 车辆压黄线检测算法
1.1 图像预处理
图像预处理是视频图像处理的第一步,它是将输入的图像进行滤波去除噪声,增强图像的过程。经过图像的灰度化、二值化、中值滤波后可以使得感兴趣的区域可视化效果得到改善,有利于对图像的进一步处理。
1.2 边缘检测
边缘检测的基本思想首先是利用边缘增强算子,突出图像中的局部边缘,然后定义像素的“边缘强度”,通过设置阈值的方法提取边缘点集。常用的检测算子有Roberts算子、Sobel算子、Canny算子、拉普拉斯算子。经实验对比后发现使用Canny算子的边缘提取效果优于其他算子,因此文中在黄线提取中使用了Canny算子[1]。
1.3 直线提取
判断车辆是否压线,要预先确定黄线的位置。文中采用Hough变换[2]进行直线提取,即通过图像信息来自动获取直线位置。
Hough变换是利用图像的全局特性而直接检测目标轮廓,将图像的边缘像素连接起来的常用方法。在预先知道区域形状的条件下,利用Hough变换可以方便地得到边界曲线而将不连续的边缘像素点连接起来。Hough变换的基本思想是利用点、线的对偶性。图像变换前在图像空间,变换后在参数空间。在图像空间XY中,所有通过点(x,y)的直线一定满足方程

式中,p为斜率;q为截距。如果将x,y看成参数,它又代表参数空间PQ中通过点(p,q)的一条直线。图像XY中通过点(xi,yi)和(xj,yj)的直线上的每一点都对应参数空间中的每一条直线,而这些直线相交于(p',q'),(p',q')恰好就是图像XY中过点(xi,yi)和(xj,yj)的直线的参数。由此可知,在图像空间中同一条直线上的点对应在参数空间里是相交的直线,当给定图像空间中一些边缘点时,就可通过Hough变换确定连接这些点的直线方程。
1.4 车辆提取
常用的运动目标提取算法有帧间差法、背景差分法、背景模型法以及在这些基本算法基础上提出的很多改进算法。其中,背景差分法主要应用于摄像机固定,背景图像相对静止的条件下,选取一帧图像作为背景图像,计算当前图像与背景图像的差来实现运动目标的检测

其中,R(i,j)为待测的运动目标;F(i,j)为视频序列图像;G(i,j)为背景图像。
文中以固定道路交通视频为基础进行研究,满足使用背景差分法的条件,因此选用背景差分法来提取目标车辆。背景差分法的优点是位置精确、运算速度快,不足之处是对环境光线的变化比较敏感,在非受控环境下需要加入背景图像进行更新。目前主要的背景更新算法有图像序列平均法[3-4]、IIR 滤波器法[5-6]等。
1.5车辆标记
为更明显地表示车辆的位置,文中采用矩形框对车辆区域进行标记。首先采用图像分割技术将车辆从图像中分割出来。图像分割的定义为:令集合R代表整个图像区域,对R的分割可看作将R分为N个满足以下条件的非空子集R1,R2,…,RN。
(2)对于所有的i,j,当i≠j时,满足Ri∩Rj= ∅。
(3)对i=1,2,…,N,有P(Ri)=TRUE。
(4)对于i≠j,有P(Ri∪Rj)=FALSE。
(5)对i=1,2,…,N,Ri是连通的区域。
其中,P为对所有集合Ri中元素的逻辑谓词,∅则代表空集。文中使用大津法作为阈值分割法。大津法(Ostu)是大津于1979年提出,对图像I,记T为前景与背景的分割阈值,前景点数占图像比例为w0,平均灰度为u0;背景点数占图像比例为w1,平均灰度为u1。图像的总平均灰度为uT=w0×u0+w1×u1。从最小灰度值到最大灰度值遍历T,当T使方差值σ2=w0×(u0-uT)2+w1×(u1-uT)2最大时,T即为分割的最佳阈值。方差是灰度分布均匀性的一种度量,方差值越大,说明构成图像的两部分差别越大,当部分前景错分为背景或部分背景错分为前景都会导致两部分差别变小,因此使方差最大的分割意味着错分概率最小。直接用大津法计算量较大,因此在实现时采用等价公式σ2=w0×w1×(u0-u1)2。完成车辆分割后,再进行图像形态学处理,进而完成矩形框标记。
2 实验结果与分析
选取固定摄像机获取的一段城市道路交通视频作为研究对象。首先采用图像分割技术,只选取黄线附近的大致区域,得到检测带,从而减少数据量,提高处理速度。实际情况中,由于光线影响以及人为划定的黄线存在偏差,会造成图像中的黄线不一定为严格意义上的直线。在用Hough变换标定黄线时会造成图1右侧所示的情况:两条黄线并非完整直线,而是由直线段连接而成。通过连接距离最远的端点即可得到道路中两条黄线。而Hough变换后,就可以得到所有线段的端点,即用十字标出的端点。再用Matlab在图中标定出黄线的位置[7],如图1所示。

图1 压黄线车辆检测示意图
图1(b)中两条直色线即为用上述方法标定的黄线。黄线标定后,这两者之间即为黄线区域,通过判断这个区域内是否有车辆,即可判断是否有车辆压线,达到检测目的。由图可以看出,图中有车辆存在压黄线的行为。确定黄线位置后,需要在图中用矩形框标出车辆位置,图2为车辆分割结果,图3即为处理结果。
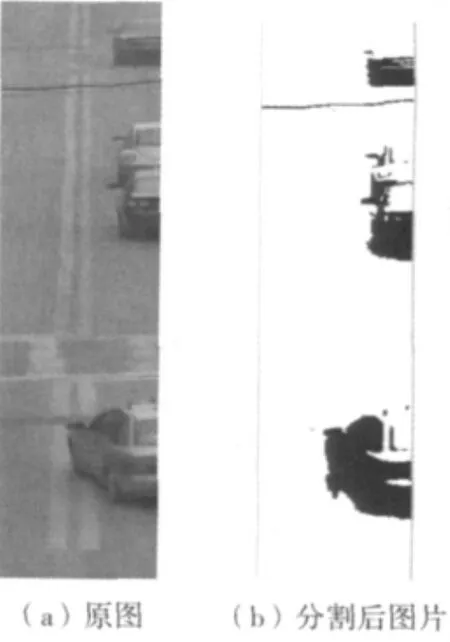
图2 车辆分割结果

图3 车辆标记
通过这个方法可以达到判断车辆压线的目的,并且算法简单有效。但与此同时,由于实际车辆行进中车距较小,车辆之间存在遮挡现象,在分割以及标记中容易把几辆连在一起的车误判为一辆,对车辆的判断和跟踪造成影响,这也将是后续研究中需要解决的问题。
3 结束语
文中提出车辆压线的检测方法,可以比较准确地实现运动目标的检测、分割、以及压线的判断,从整体效果看,基本满足使用要求。
[1]CANNY J.A computational approach to edge detection[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1986,8(6):679-698.
[2]ILLNGWORTH J,KITTLER J.A survey of the hough transform[J].Computer Vision,Graphics and Image Processing,1988,44(1):87-116.
[3]JUNG Y K,HO Y.Traffic parameter extraction using videobased vehicle tracking[C].Proceeding of IEEE/I EEJ/JSAI International Conference on Intelligent Transportation Systems,1999:764-769.
[4]KAMIJO,MATSUSHITA,IKEUCHI K,et al.Traffic monitoring and accident detection at intersections[C].Proceeding of IEEE/IEEJ/J SAI International Conference on Intelligent Transportation Systems,1999:703-708.
[5]STAUFFER C,GRIMSON W E L.Learning patterns of activity using real-time tracking[J].IEEE Trans.PAMI,2000,22(8):747-757.
[6]崔锦泰.小波分析导论[M].西安:西安交通大学出版社,1997.
[7]王家文,李仰军.Matlab 7.0图形图像处理[M].北京:国防工业出版社,2006.