自适应交通路口控制系统设计与实现
2013-09-13赵金亮
赵金亮
(山西省自动化研究所,太原030024)
随着城市化步伐的加快和发展,加之汽车的普及,使得城市中交通拥堵现象越来越严重,为此带来的事故、噪声以及环境污染等社会问题也日益严重。人们开始认识到单从车辆或道路方面考虑,很难解决交通拥挤现象,只有将现代的各种高新技术与路口的交通流量和信号控制有机结合,提出相对应的交通控制系统方可优化相关问题[1]。
把交通系统作为一个不确定性的系统,能够连续测量其状态,如车流量、停车次数、延迟时间、排队长度等,逐渐理解和掌握对象,根据动态随机车流量的变化自动调整信号控制参数,使控制系统自动地适应交通流,从而确保无论环境如何变化,均可使控制效果达到最优或次优[2]。这种控制方式就是自适应交通控制方式。
目前,我国所引用的交通信号控制都是国外20世纪八九十年代的技术,核心算法并未结合我国特殊的路网情况和道路状况。近几年,结合这种特殊的交通特点,部分城市路口采用了自适应控制,但是都是单路口实现控制。在城市中,周边路口交通流是相互影响的,笔者结合模糊控制原理,设计了一种各相位之间转换随着交通流量不同而自适应变化的交通控制策略。该策略把等待车辆长度作为控制目标,结合周边路口地感线圈实时测试到的车流量确定放行时间,以此来决定某路口各相位的绿时分配,优化交通路口信号控制,最大限度地提高道路通行能力及交通安全。同时,因为我国现行城市道路地下设施以及十字路口地下布线复杂情况,给工程施工以及车辆通行带来了许多不便与困难,工程成本高、实施难,为此本文采用无线通信技术实现交通信号无线传输,能有效解决以上存在问题。自适应交通路口控制系统尤其对城市的智能交通具有研究意义,不仅具有经济效益,同时具有更大的社会效益。
1 现有交通信号传输控制模式
现有路口交通灯的控制算法制定流程是:对车辆流量进行采样统计调查,运用统计学原理将两个方向红绿灯的延迟时间预先设定[3]。然而,在实践中,交通流量的变化往往是未知的,某些路口车流量在不同的时间段存在很大差异;原先统计方法得到的交通信号灯控制策略,已经跟不上城市交通的快速发展。针对交通流量的不确定性,需要一种交通灯能够自适应交通流量的变化完成交通疏导。
交通系统中控制器可支持定周期控制、绿波带控制、半感应和全感应控制、自适应控制等5种交通控制算法[4]。前4种算法是比较常用的控制算法,笔者利用车辆检测器以及系统,根据检测到的车辆数,预算排队车辆等待长度,提出了一种基于模糊控制原理的交通自适应控制算法。随着电子技术、网络通信技术的发展,实现小型化、较低施工成本、更加强大功能的交通信号控制系统已完全可能,微型化、网络化、分布式和开放性将成为未来交通信号控制系统的发展方向[5-6]。笔者针对实际存在的问题,提出一种信号控制系统——自适应交通路口控制系统,能有效解决城市拥堵现象,并为智能化城市交通奠定了基础。
2 自适应交通路口控制系统设计
2.1 自适应系统概述
系统主要有主控制器、从控制器、车辆检测单元构成,采用无线技术连接通信,实现交通灯信号的无线控制。其中主控制器通过远程无线与中心通信,系统基本组成如图1所示。
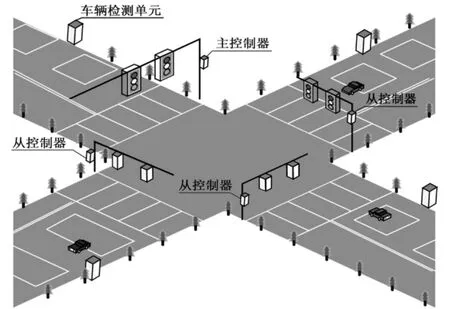
图1 自适应交通控制系统的基本组成
车辆检测单元中的地感线圈检测通过各车道的车辆数,然后将检测信号通过无线设备传输到交通主控制器,主控制器再根据交通流数学模型,通过计算车辆数得出排队等待长度,进而对信号控制进行优化,实时计算出合适的配时方案,主控制柜通过无线指挥从控制器控制交通灯变化。系统工作原理如图2所示。

图2 自适应交通控制系统工作原理
2.2 车辆检测单元
车辆检测器,即交通信息检测器,是实现交通实时控制的关键,目前在国内外交通信息采集系统中得到广泛应用。车辆检测器可采用无线地钉或者感应线圈式检测。无线地钉检测将交叉路口的车流量、车速以及道路占用率等数据通过无线网络送入主控制器,完善该路口的交通流数据库,为交通灯配时方案提供依据。车辆检测器提供的路口车辆实时信息为有效完成整个自适应过程奠定了基础(本文以地感应线圈为例)。
环形地感线圈工作原理是基于电磁感应原理完成对各车道车辆的检测。埋在地下的感应线圈与探测器卡内的电容共同构成LC振荡器,设定本底频率F为无车辆通过时的振荡器振荡频率,当车辆经过埋设有感应线圈的车道时,由于车辆底盘是金属材质将产生电涡流,此时就会促使地感线圈电感量L减小。记LC振荡器实时振荡频率为f,此时f将随着L的减小而增大,处理器将f与F进行比较,计算差异值得到车辆信息[7-8]。检测原理如图3所示。
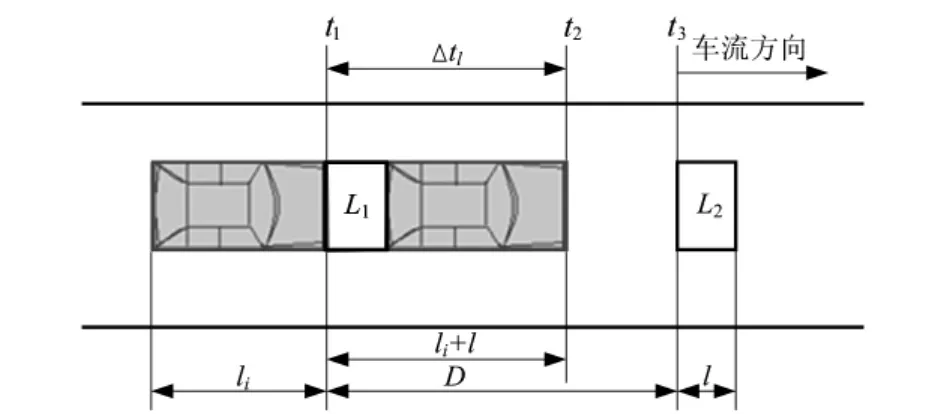
图3 车速和车长检测原理
每条车道检测区是由前后相距一定距离的两个地感线圈组成。设在路口处(即停车线处)的检测器用于探测离开该车道的车辆数,另一个用于检测进入检测区的车辆数量。检测器将路口各车道实时检测的车辆信息通过无线网络送入主控制器,处理器根据车流模型计算车辆等待长度,为系统中的自适应控制算法提供数据。本文用到的交通参数包括单车信息和车流状态信息[9]。
2.2.1 单车信息
如图3所示,同一车道埋设有间距为D的前后两个地感线圈,前后线圈分别标记为L1和L2。计算单车信息包括车辆速度和车辆长度。
设,测得第i辆车通过L1地感线圈的时间点为t1,通过L2地感线圈的时间点为t3,记Δt为两时间点差值(t3-t1),于是得到瞬时点车辆速度为:vi=D/Δt。检测第i辆车通过地感线圈L1时,记车辆电平持续时间 Δtl为(t2-t1)。由图可知,Δtl时间内,车辆所行驶距离为车身长li与线圈长度l之和,即li+l,得到车辆长度为:li=viΔtl-l。
2.2.2 车流状态信息
主控制器中,处理器模块根据检测到的各车道车辆的单车信息统计构建数据库,计算得出指定周期内的车流状态数据,包括交通流量、平均车速、占有率、交通密度和车头间距等。
1)交通流量。流量为指定时间内通过道路某地点或某断面的车辆数量,它是随机变化的。若在采样周期T内,通过此车道有N辆不同型号的车辆,则有交通流量:Q=N/T。
2)平均车速。此处检测器处理的是平均车速中的路段平均车速,定义为指定路段内某一时间段内通过的所有车辆的速度平均值,记为¯vS。
取长度为S的某一路段,单车信息中各辆车通过检测器瞬时点速度为vi,则可知驶完这一路段的平均时间为:
于是该观测期内的空间平均速度为:
即所有车辆通过地感线圈时的车辆瞬时速度平均值为路段平均速度。
3)占有率。为指定路段内所有车辆占有的道路长度总和与该路段长度之比。车辆之间有一定间隔,占有率测量难度大,一般用时间占有率代替。设,在采样周期T内,通过地感线圈车辆有N辆,测得第i车道第j辆车通过地感线圈的持续电平时间为Δtji,则T内车道i上车辆的时间占有率为:
4)交通密度。指路段区间单位长度瞬时存在的车辆数。长度为S的路段内探测有N辆车,得出交通密度为:

5)车头间距。同一车道i上相邻的两辆车对应点的距离为车头间距,第i辆车的车头间距记为HSi。平均车头间距

即车头间距HSi为交通密度的倒数。
2.3 交通流模型
本文以“十”字形交叉口为例进行研究,如图4所示。

图4 交叉路口示意图
车流中有大、中、小型以及轻、重型等多种交通车辆种类,不同类型车辆占用道路面积以及行驶灵活性不一样,停止启动缓冲时间的不同导致通过停止线的时间也不同。为计算方便,选用一种常出现类型车辆作为标准车辆单位,通常车流中占比例最高的车种为小车,本文中就选择小车为标准车辆单位。
设,模型采样步长为tu,tu的典型值为1~3s。参数定义(如图4)为:D为两地感线圈之间距离(m),结合道路车流量以及两路口相距长度确定,一般为30~60m;l(k)为k时间点相应车道上的排队车辆数;L(k)为k时间点对应相位上的排队车辆数;s(k)为k时间点相应车道的道路容量,m;min(k)为[ktu,(k+1)tu]期间进入相应车道车辆检测范围的车辆数;marr(k)为[ktu,(k+1)tu]期间到达相应车道车辆排队队列末尾的车辆数;mdep(k)为[ktu,(k+1)tu]期间离开相应车道停止线的车辆数[9]。
相邻路口间车流量是相互影响的,由于上游交叉口驶出的车流量具有一定时间延迟,将会影响本路口车道车辆排队队列[10],这个时间可用车辆驶离上游路口前置地感线圈到达本路口车辆排队队列末尾所消耗的时间:
式中:vfree为自然状态下车辆行驶的平均速度;int(·)为取整函数。
交叉路口车道上新车流排队长度等于原队列长度与驶进检测区车辆数之和减去驶离车辆数,即:

取某一相位车道中最大的队列长度为车辆排队长度L(k):

P为对应相位的车道集合。
小客车平均长度与平均停车间距之和表示为d。车道新的道路容量与进入和离开的车辆数有关:

最小绿灯时间tmin是在交叉口的几何形状基础上确定的,同时考虑的因素还包括机动车流量、非机动车流量和行人数等。此外,在绿灯开始前,结合车辆队列长度L(0),可计算得出使相应相位上所有等待车辆全部驶离路口的初始绿灯时间tini:
其中,tmax为该相位的最大绿灯时间。
2.4 信号灯控制算法步骤
完整的自适应控制算法流程如图5所示。具体的交通信号灯自适应控制算法可表述成以下几步:

图5 自适应控制算法流程图
1)根据交叉口实际车流量,指定控制系统中各相位的最大绿灯时间和最短绿灯时间,以及周期中绿灯、黄灯、红灯时间,和遇到特殊情况下的全红灯时间,从而确定最小相位控制周期时间tmin和最大相位控制周期时间tmax。
2)计算相应相位i下各车道车辆通行权绿灯时间,判断得出获得通行权的相位放行对应车道车辆,绿灯时间为ti=max(ti,min,ti,ini)。
3)放行时间ti内根据地感线圈送来的交叉口驶进和驶离的车辆数,处理器计算得出当前放行相位排队长度Li以及下一放行相位的队列长度Li+1。
4)如果当前放行相位已无车辆(Li=0),或者队列长度Li小于最小队列设定值r,或者累积绿灯时间ti等于最大绿灯时间ti,max,执行下一相位绿灯放行,回到第2步,否则继续。
5)系统结合实际路口车流量信息建立了模糊控制数据库,按照当前相位队列长度Li及ΔLi值的大小来决定新的绿灯延长时间Δti,若ti+Δti≥ti,max则ti=ti,max-ti,否则ti+Δti⇒ti,回到步骤3。
整个系统在运行过程中,除自身的自适应特性外,还设置有应急事件处理功能,方便应对特殊情况。
2.5 工业无线网技术优势及应用
本文选用无线WIA技术完成无线传输,技术优势有以下几方面:具有高可靠、超低功耗的智能多跳无线传感器网络技术;能够针对应用条件和环境的动态变化实现自组织、自治愈的智能Mesh网络构建,保持网络性能的可靠性和稳定性;用户可以方便地使用、管理,无需较高的专业知识。
3 自适应系统性能测试和分析
3.1 车辆检测部分
笔者运用所设计的控制方案,在太原市区的长风西街西环路口进行了长时期的测试,得出了车流量检测器测试结果和人工测量的真实流量结果,如表1所示。
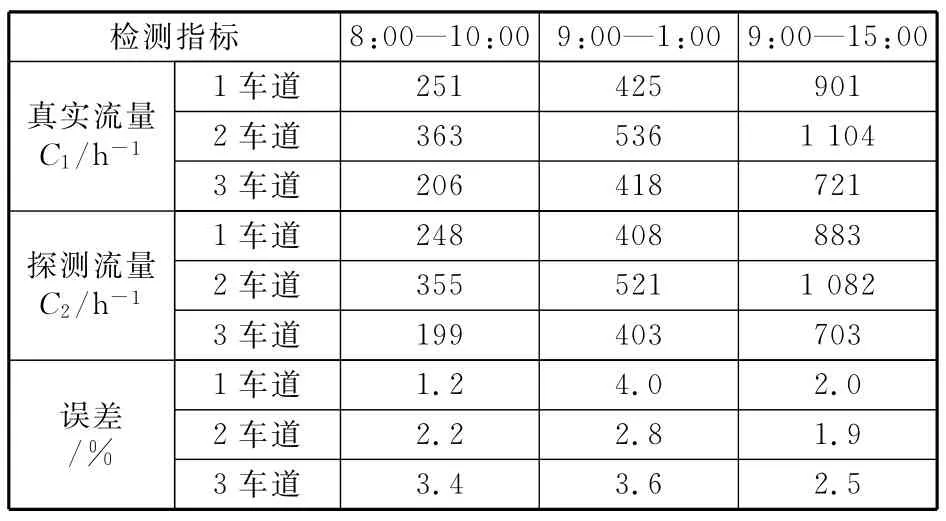
表1 车流量检测结果
现有的探测系统的探测精度最大也只有95%。从表1中可以看出,地感线圈测试各时段各车道的车流量准确率均超过95%,其准确性满足实际需要。
车流量感应线圈检测的误差来源于多方面,主要有以下3种原因造成检测器的误检或漏检。
1)车辆变道行驶使车辆金属底板通过感应线圈面积过小,产生感应电涡流过小,造成漏检。
2)部分行驶速度较快的车辆经过两感应线圈的时间跨度比较小,造成探测器认为没有辆车通过。
3)部分车辆的底盘过高,互感系数小引起电感变化量小而造成漏检。
3.2 路口车辆运行监管
对于自适应交通信号控制的交叉路口,为保证车辆安全驶离,需要设定每个相位的最短绿灯持续时间,绿灯时间一般大于6s,在本实验中最小绿灯时间全部设置为8s。经过24h观测,车流量时间段可分为高峰段、平峰段和低峰段。高峰时期,车流量较多,车道放行时间变长,很好地解决了单方向车辆拥堵问题;同时,红灯等待时间不超过人的忍耐时间。平峰时期,各相位放行时间基本不变,以一定的周期运行。低峰时期,由于车流量不大,以最短周期运行。在整个24h的运行过程中,地感线圈根据测试实时车流量确定放行时间,完成了整个自适应过程,显著提高了公路的通行能力和服务水平,大大缩短了行车时间。
3.3 系统应用
1)在一个区域或整个城市范围内,相邻路口的交通流是相互影响相互制约的,一旦某路口交通信号配时方案调整,将会影响周边路口交通状况。因此,从整个交通系统控制的最优效果考虑,周边路口检测到的交通流量数据要联系在一起相互协调,制定最有效的自适应系统交通信号配时方案。
2)当某一路口发生特殊情况,如交通事故,导致该路口车辆滞留时,系统设置有反馈信息功能,参与相邻路口信号控制,及时诱导司机避开堵塞、封路的路段,有效地疏导堵塞地区的交通流量。
3)在主要道路上,车流量大的情况时有发生,交通信号灯不能无限时放行,此时,发挥交通系统诱导作用,使后续车辆改道行驶,可以避免交通堵塞。
4 结论
由于城市交通系统自身的特点,交通流量的变化随着时间的不同而不同,为了实现有效的控制,各个相位之间的转换也应随着交通流量的不同而自适应地变化,才能达到最终的目的。笔者采用模糊自适应控制算法,来控制交叉路口车流量起到了显著效果,使交叉路口的红绿灯能够根据需要达到最高的使用效率,非常适用于随机性很大的城市交通控制。本系统的应用使得通行效率显著提高,车道过车由系统自动实现;系统合理利用交通诱导技术,实现交通流量优化、避免交通阻塞,更有效地管理现代交通。自适应交通路口控制系统是交通信号控制的一种新方法,为构建整个城市智能交通网络打下坚实的基础,促进人、车、路三位一体协调发展。
[1] 刘智勇.智能交通控制理论及其应用[M].上海:科学出版社,2003.
[2] 陶志祥,黄卫.城市交通控制的新发展[J].交通运输系统工程与信息,2002,2(3):14-17.
[3] 陆化普.智能运输系统[M].北京:人民交通出版社,2002.
[4] 陈建平,房海蓉,胡准庆.城市交通的智能控制系统综述[J].北京汽车,2001(4):10-13.
[5] Papageorgiou M,Diakaki C,Dinopoulou V,et al.Review of road traffic control strategies[J].2003(12):2043-2067.
[6] Richard Bishop.A Survey of Intelligent Vehicle Applications Worldwide[D]∥ Richard Bishop Consulting,Proceedings of the IEEE Intelligent Vehicles Symposium,USA,2000:25-30.
[7] 郭敏.车辆检测技术和车辆检测器的比较分析[J].中国交通信息产业,2003(10):55-56.
[8] 赵祥模,靳引利,张洋.高速公路监控系统的理论及应用[M].北京:电子工业出版社,2003.
[9] 金稳.多相位智能交通控制器的研究[D].杭州:浙江大学硕士论文,2007.
[10] 郝记秀,郑兆瑞.基于面向对象的交通仿真研究[J].太原理工大学学报,2004(4):437-440.
