3-TPT型并联机床静力学及刚度研究*
2013-09-12付红栓赵恒华
付红栓,赵恒华,杨 辉
(辽宁石油化工大学机械工程学院,辽宁抚顺 113001)
0 引言
并联机床作为一种新概念机床[1],与传统的机床相比具有结构简单、刚度大、承载能力强、位置精度高、响应快等优点[2-3],已经成为数控机床的发展趋势。静力学特性是并联机床重要性能指标,也是并联机床的设计基础;而机床运动平台的刚度影响并联机床的动态特性和在受负载情况下的定位精度,刚度随运动平台位姿的变化而变化,所以刚度分析对机床结构的设计也是十分重要的。本文基于3-TPT型并联机床作为研究对象,首先建立该机床的静力学平衡方程[4-6]和柔度系数变化矩阵C,然后运用Matlab软件得到运动平台与各杆之间的受力关系以及运动平台分别在X、Y和Z方向的变形变化趋势,这一研究为并联机床的结构优化及性能分析提供了理论依据。
1 静力学方程的建立
由于三自由度3-TPT并联机床机构上下平台间的平行机构[7,8]限制了运动平台的三个转动自由度,即平行机构将承受施加在运动平台上的转矩,故机床静止状态下的受力情况如图1所示。
机床在平衡状态下,根据虚功原理,由任意虚位移产生的虚功总和为0,即关节空间虚位移产生的虚功等于操作空间虚位移产生的虚功


图1 并联机床静力示意图

其中 c=R - r,R=600mm,r=200mm,(xp,yp,zp)为动坐标系的原点Op在基坐标系中的坐标。
由于虚位移的任意性,可令 δl1=0,δl2=0得:

式中:F是运动平台的受力矩阵,Fl是机床各杆的受力矩阵,为运动平台的力雅可比矩阵。
即:

2 静力分析
由机床所受外力求出各杆的驱动力,由此可对各杆件进行受力分析和驱动功率设计[9-10]。根据式(6)所示的静力学正解方程,且利用Matlab仿真软件[11-12]可作出该三杆并联机床的运动平台与各驱动杆之间的受力关系如图2所示。
图2a、b和c分别为运动平台在z=lmin截面上Y方向承受1000N的载荷时,驱动杆杆1、杆2和杆3的受力变化情况。由图可见,驱动杆所承受的最大载荷不超过运动平台负载的2.5倍,当运动平台在z=lmin截面上时,驱动杆受力大小和方向都与运动平台的位置有关。
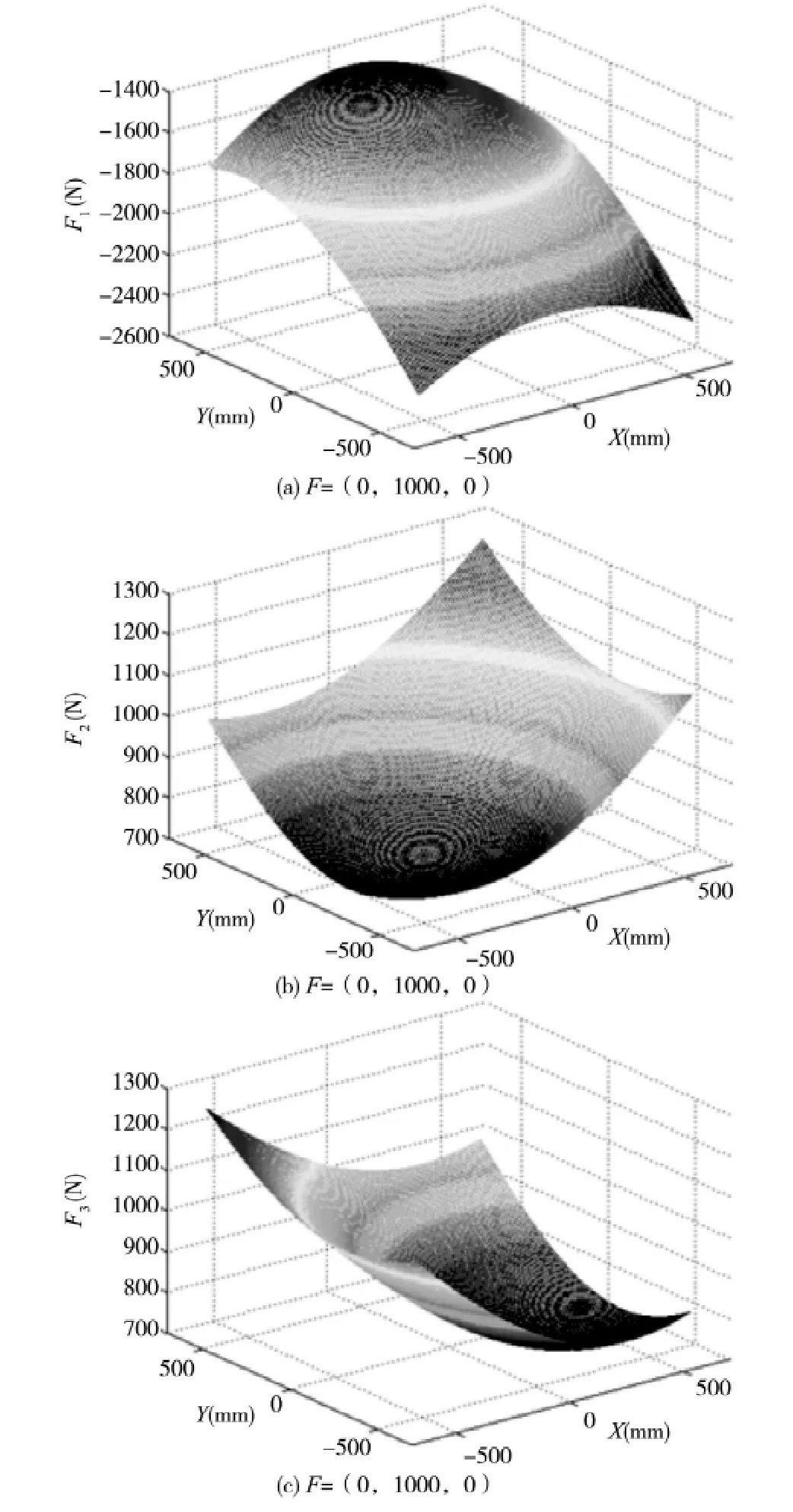
图2 运动平台与驱动杆之间的受力关系
3 刚度研究
在受到外力作用下时机床运动平台会产生变形。变形的大小与运动平台的刚度以及作用力的大小有关。
各杆的受力与关节传动刚度及驱动杆变形之间的关系为:

式中k为杆系刚度矩阵,是一个对角矩阵。

由(7)式和(9)式得机床的柔度矩阵为:

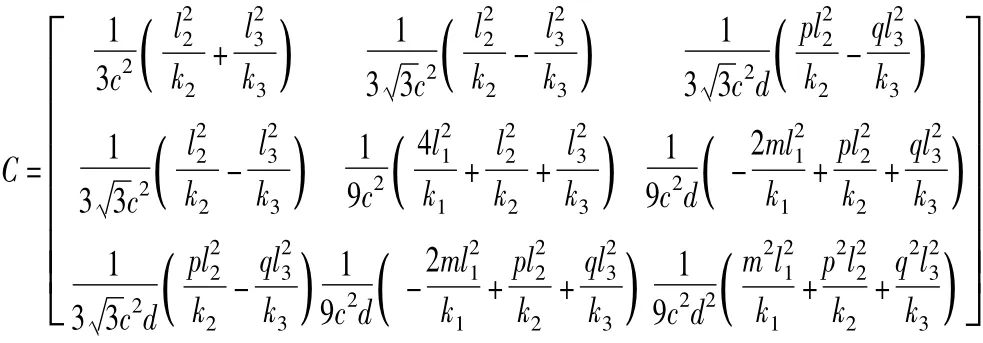
利用Matlab软件可仿真出三杆并联机床的运动平台在z=lmin截面上的柔度系数变化特性。

图3 并联机床柔度特性
图3a、b和c中分别为结构柔度矩阵C正对角线上的三个元素变化特性,当运动平台在z=lmin截面上承受X、Y和Z方向单位载荷时,运动平台在X、Y和Z方向上的变形变化趋势。从仿真结果可以看出:从水平截面中心到截面边缘,Z方向的刚度降低近一个数量级,而X、Y方向刚度降低2.2倍左右,即随着运动平台远离Z轴,Z方向刚度急剧下降,X、Y方向刚度降低较为缓慢。
4 结束语
本文对3-TPT并联机床静力学及刚度进行了研究与分析,首先根据虚功原理建立了并联机床的静力学平衡方程,并利用Matlab软件计算出运动平台与各杆之间的受力关系,由结果可知,驱动杆所承受的最大载荷不超过运动平台负载的2.5倍;此外在Matlab环境下对运动平台刚度的变化趋势做出了仿真分析,结果表明:运动平台远离Z轴时,其Z方向刚度变化较为明显,这为并联机床的动力学研究及其最优化设计提供了理论基础。
[1]程仙国.三杆并联机床化机床研究[D].抚顺:辽宁石油化工大学,2008.
[2]蔡光起,胡明.机器人化的三腿磨削机床的研制[J].制造技术与机床,1998,10(10):4 -6.
[3]孙希龙,蔡光起.三杆并联机器人计算机仿真研究[D].沈阳:东北大学,1997.
[4]王传强,赵恒华.3-TPT并联机床奇异性及平稳性研究[J].组合机床及自动化加工技术,2010(3):26-28.
[5]蔡光起,原所先,胡明.三自由度虚拟轴机床静力学及动力学的若研究[J].中国机械工程,1999,10(10):1108-1111.
[6]朱春霞,朱立达,刘阳.并联机床的整机静力特性分析[J].东北大学学报,2007,8(28):1171 -1173.
[7]Li Yuwen,Wang jinsong,Liu Xinjun,et al.Dynamic performance comparison and counterweight optimization of two 3-DOF parallel manipulators for a new hybid machine tool[J].Mechanism and Machine Theory,2010,45(11):1668-1680.
[8]Cai G Q,Wang Q M.Hu M,A study on the kinematics and dynamics of a 3-DOF parallel machine tool[J].Journal of Material of Processing Technology,2001,111:269 -272.
[9]李兴山,蔡光起.基于MATLAB的三自由度并联机床的静力学特性分析[J].制造业自动化,2011,33(3):80-81.
[10]李永刚,宋轶民,黄田.少自由度并联机床机构的静力分析[J].机械工程学报,2007,43(9):80-83.
[11]崔智全,赖一楠,赵韩涛,等.MATLAB 2009从入门到精通[M].北京:中国铁道出版社,2011.
[12]胡晓冬,董辰辉.MATLAB 2009从入门到精通[M].北京:人民邮电出版社,2010.
