一种高精度自适应温控算法的设计与实现
2013-09-12郭天天周明安
郭天天,沈 青,周明安
(国防科技大学指挥军官基础教育学院,长沙 410072)
在温度控制领域PID控制是应用最广泛的控制方法,它结构简单、易于实现。PID参数对控制效果起着至关重要的作用,为了取得好的效果,当受控对象特征发生变化时,需要对参数作相应的调整,但传统PID方法对此无能为力。为此,在有些温度控制中采用了模糊控制技术(Fuzzy control),使控制过程可以随受控对象的变化而变化,并取得了较好的控制效果,但当精度要求较高时,模糊算法难以满足。所以,有人提出采用模糊控制和PID控制相结合的方法来进行温度控制[1-4],这些方法在各自的应用中都取得了较好的效果,但有的算法较为复杂,不适合在单片机上实现;有的控制精度不高;有的需要采用精密器件,成本较高。
本文针对采用电阻丝加热的温控系统,融合PID控制和模糊控制的优点,设计实现了一个高精度自适应温控算法。
1 系统结构
某恒温化学检测仪器的研制需要设计并实现一个温控系统,要求恒温37℃,误差允许范围范围为±0.1℃,其硬件结构如图1所示。

图1 仪器温控硬件结构框图
受控对象为铝制试管架,共有3种尺寸,加热部件为电阻丝绕制而成的加热片,也有3种规格,用螺丝固定在试管架的底部。控制部件为AT89S52单片机,它采集温度传感器DS18B20的输出,输出PWM信号,通过可控硅控制加热片的通断,以达到温控的目的。
该温控系统的要求和特点如下:
1)温控精度高,达到±0.1℃;
2)温控稳定性高,不能出现过冲,即任何时候温度都不能高于 37.1℃;
3)受环境因素影响大,受控对象尺寸、加热片功率和效率各不相同,且铝吸热、散热快。
为解决上述问题,根据被控系统的实际响应,运用模糊推理,考虑加热片的功率和效率、目标温度与环境温度差等因素,提出了一种高精度自适应温控算法,实现温控过程中PID参数的自适应调整,以满足系统要求。
2 PID与模糊温控原理
2.1 PID控制原理
PID是一种闭环控制,其原理如图2所示。

图2 PID控制原理
图2中r(t)为设定值,y(t)为实际值,e(t)=r(t)-y(t)为两者的偏差。PID控制的主要原理为将e(t)的比例项、积分项和微分项,通过线性组合构成控制量进行控制,故称PID控制器,其控制规律为

式中:KP、KI和KD分别为比例系数、积分系数和微分系数;比例系数KP决定系统的响应速度;积分系数KI主要用的消除系统的稳态误差;微分系数KD改善系统的动态特性。PID控制实现简单、应用方便,并可以连续控制。但如果受控对象具有时变、非线性、大滞后等特点,则PID控制算法难以满足要求。
2.2 模糊控制原理
模糊控制系统是一种以模糊数学为理论基础,采用模糊表示语言和模糊逻辑规则推理,利用计算机技术构成的闭环自控系统,适用于控制无法取得精确数学模型、数学模型不确定或经常变化的对象,它主要依赖于操作人员的经验和直观判断,非常容易应用[5-6]。其结构如图3所示。

图3 模糊控制系统的组成
温度控制系统的模型通常是不完善的,即使模型已知,也存在参数变化的问题。PID控制虽然简单、方便,但难以解决非线性和参数变化等问题。模糊控制不需要对象的精确模型,适合复杂温控系统的控制。但在实际应用中,如果温控精度较高,则模糊控制难以达到。
2.3 模糊-PID复合控制
模糊-PID复合控制是一种PID与模糊控制相结合的控制方法[7]。其主要原理为,当温度偏差较大时采用模糊控制,响应速度快,动态性能好;当温度偏差较小时采用PID控制,使其具有良好的静态性能,以满足系统控制精度。模糊-PID复合控制可以实现两者的优势互补,比单一的模糊控制或单一的PID调节有更好的控制性能,其原理如图4所示。

图4 模糊推理-PID复合控制原理框图
3 自适应温控算法设计与实现
3.1 设计思想
算法针对的是一个具有大惯性、纯滞后、非线性的时变系统,其变化机理非常复杂,难以建立精确数学模型。采用模糊-PID复合控制既具有模糊控制灵活而适应性强的优点,又具有PID控制精度高的特点,可以较好地解决动态响应和稳定精度之间的矛盾。
如果采用模糊和PID分段控制,在切换时容易产生干扰,且模糊推理规则和PID控制参数都难以确定。所以将模糊控制与PID控制并联使用,主要思想为,先找出PID控制器的3个参数与偏差e(t)和偏差变化率c(t)之间的模糊关系,在控制过程中采样和计算e(t)和c(t),根据事先确定好的模糊推理规则实时计算参数的修正量,再使用修正后的参数进行PID控制。在模糊推理中,e(t)和c(t)作为输入,PID控制器3个参数的修正量作为输出,如图5所示。

图5 自适应算法框图
3.2 离散PID算法
因为算法要在单片机上实现,所以使用离散PID算法,式(1)所示的PID公式可变换如下所示的离散形式。

因为系统加热速度较快,温控精度要求高,且不能出现过冲,这就要求较高的采样频率和较多的历史数据,所以算法中 TS的取值为2 s,n的取值为 20,KP=KP_INIT+ ΔKP,KI=KI_INIT+ΔKI,KD=KD_INIT+ ΔKD,KP_INIT=10、KI_INIT=0.22 和KD_INIT=100分别为3个系数的初始值。
3.3 模糊推理
3.3.1 模糊化处理
模糊控制器中系统输入、输出变量的实际变化范围,称为变量的基本论域。在进行模糊推理时,必须先将输入变量从基本论域转化到相应模糊集的论域[8],在算法中,采用模糊化处理

式中:x为闭区间[a,b]上的精确量;y为[-n,m](n为不小于2的正整数)中的模糊离散量为量化因子。
本算法中,模糊控制系统的输入变量为温度偏差e和偏差变化率c,输出变量为PID的3个参数。e和c的论域为{-3,-2,-1,0,1,2,3},模糊集为:{NB,NM,NS,ZO,PS,PM,PB}。ΔKP的论域为{-0.3,-0.2,-0.1,0,0.1,0.2,0.3},ΔKI的论域为{-3,-2,-1,0,1,2,3},ΔKD的论域为{-0.03,-0.02,-0.01,0,0.01,0.02,0.03},三者的模糊集均为{NB,NM,NS,ZO,PS,PM,PB}。为了计算和编程的方便,所有变量都采用三角形隶属函数。
3.3.2 模糊控制规则
制定模糊控制规则要从温控系统的实际情况出发,根据PID 3个参数的作用以及它们之间的相互关系,综合考虑稳定性、响应速度、超调量、控制精度等因素[9],在不同阶段采用不同的规则。根据经验和反复测试,我们采用的控制规则如下:
1)初始阶段,取较大的KP以提高响应速度,取较小的KI以防止积分饱和,KD取小值。
2)中间阶段,KP、KI和KD都取中间值,以保证一定的响应速度及避免超调。
3)最后阶段,KP取大值以减小静差,增大KI以减小静差并提高稳定性,减小KD以防止产生振荡[10]。
采用“若A且B则C”(if A and B then C),即R=(A×C)∩(B ×C)的推理策略。ΔKP、ΔKI、ΔKD的模糊控制规则如表1~表3所示。

表1 ΔKP模糊控制规则

表2 ΔKI模糊控制规则

表3 ΔKD模糊控制规则
模糊推理得到的结果是控制量的一个模糊子集,采用加权平均法将其去模糊化,变为精确量输出。
3.4 算法流程
算法采用C51语言编写,在AT89S52单片机上实现,流程如图6所示。

图6 软件流程
首先设置参数的初始值,然后定时器每2 s钟产生中断,进入中断服务程序进行模糊推理和PID运算,输出PWM信号控制加热片的通断,中断服务程序的流程如图7所示。

图7 中断服务程序流程
4 试验结果与分析
将算法应用于所研制的仪器进行了一系列试验。由于仪器为一次开机,长期使用,对加热时间不是很敏感,所以重点测试了温控精度,对模糊-PID复合控制和单PID控制进行了对比。由于仪器的研制历经2年的时间,得以在不同环境温度下进行试验,图8~图10为试验结果。
试验采用的温度传感器的分辨率为0.0625℃,记录试验结果时将其进行了四舍五入,图中的数据均为不同仪器多次试验结果的平均值,横坐标为时间(分钟),纵坐标为温度(℃)。通过分析可以发现:
1)模糊-PID自适应算法温度控制稳定,出现的波动较少,当环境温度为4℃和30℃时,在2h的试验时间里,出现了3次波动,而环境温度为18℃时只有2次波动,超调和振荡特性都较好。而单PID控制算法出现的波动较多,当环境温度为4℃时,出现了6次波动,超调和振荡特性都不够好。
2)模糊-PID自适应算法温度精度高,不论环境如何,温度的波动幅度都在误差允许范围内;而单PID控制算法的波动幅度均大于误差允许范围,不能满足设计要求。
3)模糊-PID自适应算法的适应性较好,不论环境温度是多少,绝大部分时间温度均保持在目标温度。而对单PID算法来说,当环境温度较低时,大部分时间的温度低于目标温度;当环境温度较高时,大部分时间的温度高于目标温度。
从上述试验结果可以看出,本文提出的自适应算法满足系统需求,在稳定性、控制精度和适应性等方面均要优于单PID控制。

图8 环境温度4℃的试验结果
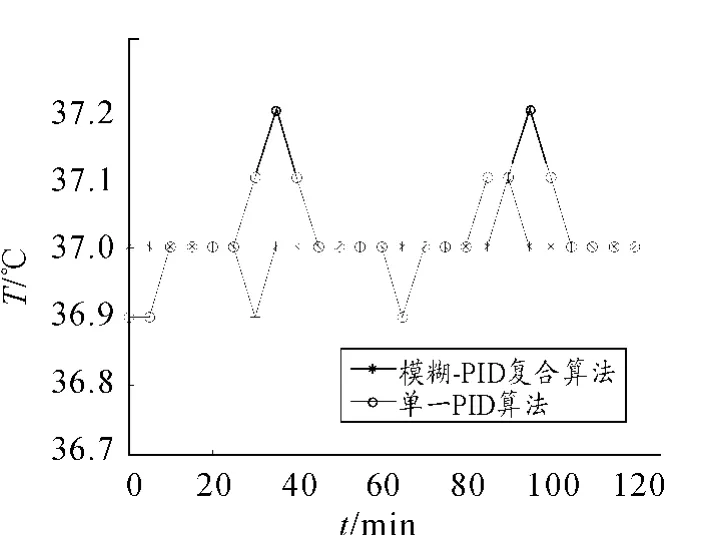
图9 环境温度18℃的试验结果

图10 环境温度30℃的试验结果
5 结束语
在对温控技术进行深入研究的基础上,针对某仪器温控系统,结合模糊控制和PID控制技术,利用它们各自的优势,设计了一个高精度自适应温控算法,并在单片机上实现。试验结果表明,本算法在稳定性、控制精度和适应性方面均优于单PID控制算法,仪器的实际运行情况也证明了这一点。本算法在类似的化学仪器中具有很强的实用价值[11]。
[1]孙丽飞,田小建,艾宝丽.大功率半导体激光器的精密模糊PID温控系统[J].量子电子学报,2005,22(3):382-386.
[2]王晓冲.模糊参数自整定PID温控系统的设计与研究[D].长沙:中南大学,2007.
[3]杨红,陈颖,何莉,等.基于模糊-PID控制算法的温控系统设计[J].广西师范大学学报:自然科学版,2005,23(1):106-110.
[4]周黎英,赵国树.模糊PID控制算法在恒速升温系统中的应用[J].仪器仪表学报,2008,29(2):405-409.
[5]汤兵勇,路林吉,王文杰.模糊控制理论与应用技术[M].北京:清华大学出版社,2002:107-109.
[6]曾光奇,胡均安,王东,等.模糊控制理论与工程应用[M].武汉:华中科技大学出版社,2006.
[7]樊军庆,张宝珍.温度控制理论的发展概况[J].工业炉,2008,30(6):12-14.
[8]Juang Chia-Feng,Chen Jung—Shing.A recurrent neural fuzzy network controller for a temperature control system[C]//IEEE International Conference on Fuzzy Systems.[S.l.]:[s.n.],2003(1):408-413.
[9]Kaehler,Steven D.Applying fuzzy logic in a complex temperature control system[C]//Proceedings of SPIE—The International Society for 0ptical Engineering.[S.l.]:[s.n.],2002(4787):218-231.
[10]韩大平,林国海,杜钢,等.模糊PID控制算法在回转窑温度控制中的应用[J].材料与冶金学报,2005,4(4):321-325.
[11]刘建斌.高精度温控电路设计[J].导航与控制,2012,11(1):38-40.
[12]卢海洋,林平.基于模糊PID控制的UUV定深控制系统设计[J].重庆理工大学学报:自然科学版,2011(6):58-62.
