PLC控制系统可靠性研究
2013-09-07
(黑龙江技师学院,黑龙江 鸡西 158100)
引言
由于PLC是专门为工业生产环境设计的装置,PLC控制系统如果设计不当,由PLC组成的控制系统往往在应用中会产生一些可靠性方面的问题。如干扰特别强烈,可能使PLC引起错误的输入信号,因此为提高控制系统的可靠性,在设计时采取相应有效的抗干扰措施是非常必要的。
1 PLC控制系统可靠性因素分析
PLC可靠性研究思路:描述的通信模型可推出如图1所示的低压PLC通信模型。
2 提高PLC控制系统可靠性的方法
2.1 输出输入配线注意的问题
抑制电路断开时产生的电弧对PLC的影响。电阻可以取51-120欧,电容的额定电压应大于电源峰值电压。电容可以取0.1-0.47uF,续流二极管可以选1A的管子,其额定电压应大于电源电压的3倍。要提高现场输入PLC信号的可靠性,首先要选择可靠性较高的变送器和各种开关,防止各种原因引起传送信号线短路、断路或接触不良。其次在程序设计时增加数字滤波程序,增加输入信号的可靠性。在现场输入触点后加一定时器,定时时间根据触点抖动情况和系统所需要的响应速度确定,一般在几十毫秒,这样可保证触点确实稳定闭合后,才有其它响应。模拟信号滤波可采用程序设计方法,对现场模拟信号连续采用3次,采样间隔由A/D转换速度和该模拟信号变化速率决定。
3次采样数据比较、数据交换指令、数据段比较指令去掉其最大值最小值,保留中间值作为本次采样结果存放在数据寄存器中,提高读入PLC现场信号的可靠性还可以利用控制系统自身特点,利用信号之间关系来判断信号的可信程度。如进行液位控制,由于储罐的尺寸为已知,进液和出液的阀门开度和压力是事先给定,在一定时间内罐内液体变化高度大约在什么范围是知道的,如果这时液位计送给PLC的数据和估算液位高度相差较大,则可判断为液位计故障,通过故障报警系统通知操作人员检查该液位计。又如各储罐有上下液位极限保护,当开关动作时发出信号给PLC,这个信号是否真实可靠,在程序设计时我们将此信号和该罐液位计信号对比,如果液位计读数也在极限位置,说明该信号是真实的;如果液位计读数不在极限位置,则可判断为液位极限开关故障或传送信号线路故障,同样通过报警系统通知操作人员处理该故障。由于在程序设计时,采用了上述方法,大大提高了输入信号的可靠性。
2.2 用软硬件互锁解决误发讯及误动作
在PLC的输出装置中,有的执行元件如电机的正反转、机械零件的前进和后退等 ,有两个动作。连锁分动作优先和输入信号优先。动作优先指先进入信号优先,后进入信号从前输出信号OFF有效,其梯形图如图2所示。
输入信号优先指:先进入信号输出ON后进入信号也是前输出为OFF,用新的信号使输出为ON。其梯形图如图3所示。
3 PLC控制系统可靠性的措施
当输入端或输出端接有感性元件时,对于直流电路,应在它们两端并联二极管如图(4)所示对于交流电路,应在它们两端并联阻容吸收电路如图(5)所示。

图1 低压PLC通信模型
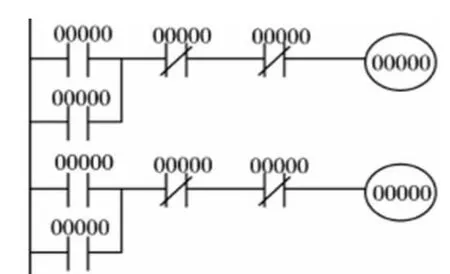
图2 动作优先梯形图

图3 输入信号优先梯形图
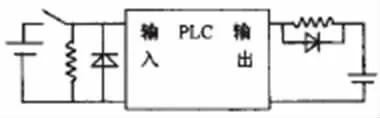
图4 直流输入输出点的保护
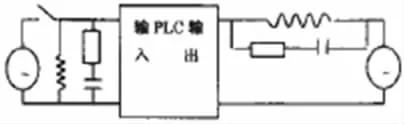
图5 交流输入输出点的保护
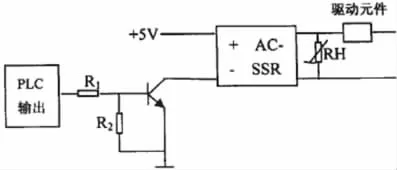
图6 电磁阀及交流接触器驱动电路
当PLC的输出驱动的负载为电磁阀或交流接触器之类的元件时,在输出端与驱动元件之间增加固定继电器,如图6。
4 电源部分防干扰措施
电源质量的好坏直接影响PLC控制系统的可靠性,PLC的交流电源输入端加接带屏蔽层的隔离变压器和低通滤波器。考虑到高频谐波干扰不是通过变压器绕组的互感耦合,而是靠初、次级寄生电容耦合,初、次级之间应采用三层屏蔽层保护,这样可明显提高对共模干扰信号的抑制。在实际控制系统中,接地是抑制干扰、使系统可靠工作的主要方法。在设计中如能把接地和正确的屏蔽结合起来就可以解决大部分干扰问题。接地设计有两个基本目的:消除各电路流经公共地线所产生的噪声电压和避免磁场与电位差的影响,使其不形成地环路,如果接地方式不好就会形成环路,造成噪声耦合。理想的接地是一个系统的所有接地点与大地之间阻抗为零,但这是难以做到的。在实际接地中总存在着连接阻抗和分散电容,所以如果接地线不佳或接地点不当,都会影响接地质量。
5 PLC冗余设计研究方法
由于冗余设备长期处于空闲状态,使得控制系统的成本大幅度地增加,因此其应用必然受到一定程度的限制。以下介绍一种新的冗余设计方法:双重并联冗余设计,内部原因包括系统的偶然性故障和长时间使用后的性能老化,以及经过可靠性增长试验仍未能发现的软件和硬件缺陷等引起的故障。冗余设计技术主要针对系统可能出现的永久性、瞬间性和间歇性故障进行冗余设计。冗余技术即采用备用的硬件或软件参与系统的运行或处于准备状态,一旦系统出现故障,能自动切换,保持系统不间断地正常工作。软件冗余:采用程序复执的方式,能有效地预防和处理瞬时故障。所谓复执,是指在系统出现瞬时故障时,重复执行故障的那一部分程序,这样系统不必停机,往往可以自动回复到原来正确的动作,这实际上是一种时间冗余方式。
[1]袁任光.可编程序控制器应用技术与实例[M].广州:华南理工大学出版社,1997.
[2]段苏振.提高PLC控制系统可靠性的设计因素[J].电气传动,2003(05):45-49.
[3]赵跃华.可编程序控制器及其应用[M].成都:电子科技大学出版社,1998。
