CTCS-3系统中ATP子系统的仿真研究
2013-09-06黄秀玲朱文良
黄秀玲,朱文良,原 萍
(上海工程技术大学城市轨道交通学院)
1 CTCS-3系统中ATP车载子系统的防护原理
在CTCS-3级系统中无线闭塞中心(Radio Block Center,以下简称RBC)通过GSM-R无线通信系统将行车许可和限速信息发送给车载ATP子系统。ATP子系统首先根据接收到的行车许可信息,列车位置信息,限速信息等动态信息,以及列车制动性能信息、线路信息、列车构造速度信息等静态数据计算列车运行的安全防护曲线,列车安全防护曲线一般包括:最大允许速度曲线、报警速度曲线、常用制动曲线、紧急制动曲线,允许缓解曲线。接着车载ATP系统根据接收到的列车位置信息、行车许可终点信息、当前运行速度信息等判断列车当前运行是否安全:若根据当前的运行速度计算的制动距离大于行车许可的终点,则车载设备启动紧急制动,使列车以最大的减速度停止,从而最大程度地减少事故的发生。然后根据车载ATP系统生成的防护曲线判断列车是否超速运行:在正常情况下,列车按小于等于最大允许速度安全运行,此时ATP不输出任何制动指令;当列车速度超过最大允许速度,并且超过报警速度值时,车载设备向司机发出报警,报警持续到实际速度低于允许速度后,再持续报警2S时间;当列车速度继续超速,并且达到常用制动速度值时,车载设备实施常用制动直到实际速度低于缓解速度,由设备或司机选择缓解常用制动;当列车因常用全制动失效或者前有突发事件使列车的行车许可缩短导致列车当前速度超出紧急制动曲线,车载设备实施紧急制动,此时必须待列车停稳后司机才能实施缓解紧急制动操作。
2 CTCS-3系统中ATP子系统的相关规定
在300 km/h及以上线路,CTCS-3级列控系统车载设备速度容限规定为超速2 km/h报警、超速5 km/h触发常用制动、超速15 km/h触发紧急制动。
为保障列车安全运行,ATP生成的常用制动模式曲线终点与列车获得的行车许可界限间有一定的安全防护距离,以防止列车因特殊原因超出ATP防护曲线,确保列车在危险点之前停车。即根据文献2在设计列车的制动模式曲线时,站内列车安全防护距离最大值控制在小于等于60m、区间控制在小于等于110 m内。
3 列车防护曲线模型的计算
根据《牵规》列车在制动过程中的合力为C

其中:B为列车的制动力,kN;W0为列车运行过程中的基本阻力,如风对列车造成的阻力,kN;W附为附加阻力,包括由于坡度,曲线,隧道等原因造成的阻力,kN。
根据牛顿等二定律:F=ma。列车在制动过程中的减速度为:

其中:M为列车总重量,包括列车车辆的质量以及列车转动质量,t。
当考虑回转质量时:

其中:γ为质量回转系数。
根据式(1),式(2),式(3)即可得到列车在制动过程中的减速度。
列车在发生紧急制动过程中采用气电混合制动(本文以CRH3为例),如图1所示,其制动力B的大小在整个制动过程中并非一直不变,而是随着速度的变化而变化,因此紧急过程中制动力B的大小为:

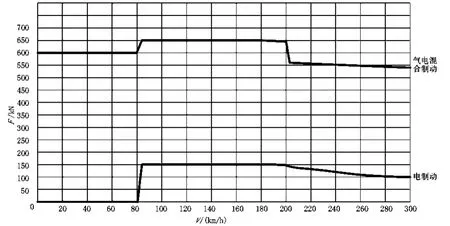
图1 CRH3列车制动力-速度图
6,可得列车在空气中的运行阻力为W0,如式(5)所示:

其中:W0为列车阻力,N;M为列车质量,t;n为轴数;N为车辆数;ν为列车运行速度,km/h;A为正面的截面积,m2。
4 仿真分析
根据图1以及式(1)及式(5)可知,列车在制动过程中制动力的大小随速度大小改变而变化,因此列车在制动过程中负加速度也在变化,使列车作非匀减速运动,而这给列车防护曲线的计算造成一定的难度。为解决这难题,本仿真系统采用等步长法,即将距离均匀地划分成若干,并假设列车在每段中作匀速运动。为使仿真结果更接近实际,本仿真系统借助matlab强大的计算功能设:。
ATP防护曲线的计算需要行车许可终点以及相应的限速信息。在CTCS-3系统中,RBC通过GSM-R系统循环发送给车载设备行车许可信息以及限速信息,列车根据获得的行车许可终点减去防护距离作为本列车此次的停车点,车载ATP需根据此停车点判断列车运行是否安全,并计算此行车许可终点内的安全防护曲线。根据式(1)~式(5),并假设一列8编组的CRH3型列车侧线出站,道岔限速为80 km/h,坡道为6‰,发车进路为1 600 m,其出站过程的防护曲线如图2所示。
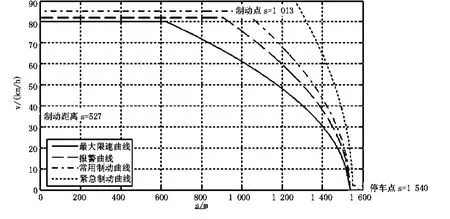
图2 列车出站过程防护曲线
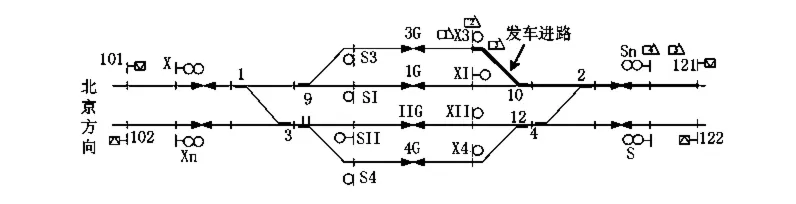
图3 列车出站示意图
根据CTCS-3列控系统的要求,列车在发车前即在图4中位置1获得行车许可终点,为121站界标处,并生成如图3所示的防护曲线。根据仿真结果得其制动距离(即从起模点到列车停稳的距离)为527 m,因此列车在距离行车许可终点即121站界标前大于:制动距离527 m+安全防护距离60 m+附加距离(制动响应时间3.5 s+信息传输及处理时间内行走的距离)内方发送给车载ATP新的行车许可终点,否则将会造列车实施常用制动甚至是紧急制动。
当列车行车许可终点得到更新后,行车许可向前延伸到区间中,此时生成防护曲线如图5所示。其中设区间限速为300 km/h,一次行车许可终点包括15个闭塞分区,每个闭塞分区为2 000 m。此时列车的制动距离由图4可得为7 037 m。因此当列车在区间运行时,行车许可必须在当障碍物在列车前方大于:制动距离7 037 m+安全防护距离110 m+附加距离(制动响应时间3.5 s+信息传输及处理时间内行走的距离)的距离得到更新。

图4 列车区间运行防护曲线
5 结论
本仿真软件主要针对CRH3型列车的ATP子系统,通过仿真可清楚直观地得到列车的制动距离,并可以计算得出列车行车许可更新的时间要求,从而有助于提高列车运行的安全性和舒适性。由于列车运行环境非常复杂,并且不同的车型相关的参数不同,但是在本仿真系统中只需给出不同列车的牵引、制动特性,以及线路的坡度、曲率等相关数据,即可得出相应的防护曲线、列车的制动距离以及行车许可的更新时间等重要信息。而RBC发送给车载的行车许可信息的更新时间是直接关系列车运行的安全性和运营效率,因此本仿真软件对提高铁路运输的安全性和运营效率具有一定的参考价值。
:
[1]中华人民共和国铁道部科学技术司.CTCS技术规范总则(暂行)[S].科技运函,2004,14.
[2]中华人民共和国铁道部科学技术司.CTCS-3级列控系统需求功能规范(FRS)(V1.0)[S].科技运函,2008,113
[3]中华人民共和国铁道部科学技术司.CTCS-3级列控系统总体技术方案(V1.0)[S].科技运函,2008,34.
[4]饶忠.列车牵引计算[M].北京:中国铁道出版社,2002.
[5]朱帼蓉,陈慧民.CRH3高速动车组牵引特性分析[J].上海铁道科技,2010,(4):97-99.
