下肢康复机器人训练改善缺血性脑卒中偏瘫患者下肢功能的临床效果研究
2013-09-06赵雅宁郝正玮李建民马素慧陈长香
赵雅宁,郝正玮,李建民,马素慧,陈长香
人在行走时,双侧下肢交替有节律地进行,两臂轻松地随着腿部进行交替运动而摆动,身体重心对称地左右移动,在整个步行过程中,下肢髋、膝和踝关节的角度变化是一个动态过程并且要相互之间进行协调[1]。20世纪90年代初,国内外的许多机构就开始利用机器人的康复技术进行康复训练以及进行减重步行辅助训练。当机器人训练临床策略应用于神经系统损伤的疾病时,成为众多研究人员和临床医生研究的对象,且发展到了临床的领域[2]。因此为了证实下肢康复机器人改善下肢偏瘫患者的临床效果,本研究采用由瑞士苏黎世Balgrist大学附属医院脊髓损伤中心开发、瑞士Hocoma公司生产的下肢康复训练机器人[3],探讨肌力对下肢关节活动度的影响,为偏瘫患者的关节活动度的改善提供更科学、更有效的治疗方法。
1 对象与方法
1.1 纳入与排除标准 纳入标准:(1)脑梗死诊断符合1995年第四届脑血管病学术会议制定的《各类脑血管疾病诊断要点》诊断标准[4],经颅脑CT或MRI检查确诊;(2)年龄30~70岁,病程1~3个月,患者生命体征平稳、意识清楚、能听从指令,单侧肢体瘫痪;(3)在服用降压药的情况下血压维持在150/90 mm Hg(1 mmHg=0.133 kPa),无严重的心脏病史,无其他神经系统疾病。排除标准:(1)患有其他影响步行能力的神经肌肉和骨关节疾病,患有严重的急慢性心瓣膜病、心肌病及其他器质性心脏病;(2)不愿意参加试验者,脑出血和颅脑创伤造成的偏瘫者;(3)有精神症状、听力障碍、理解障碍、严重的认知障碍者;(4)近期心绞痛频繁发作及不稳定型心绞痛者。
1.2 研究对象 选取2010年12月—2011年12月在河北联合大学附属医院神经内科住院的缺血性脑卒中 (稳定期)偏瘫患者40例,随机分为对照组 (20例)和 Lokomat组 (20例)。两组患者年龄、性别、偏瘫情况比较,差异均无统计学意义 (P>0.05,见表1)。
表1 两组患者的一般资料比较 ((±s)Table1 Comparison of general information between two groups

表1 两组患者的一般资料比较 ((±s)Table1 Comparison of general information between two groups
注:*为t值
组别 例数 年龄(岁) 男/女 偏瘫左例 右例对照组20 57.6±8.2 15/5 5 15 Lokomat组 20 51.8 ±10.1 17/3 7 13 χ2(t)值 -0.15*1.59 0.00 P值0.88 0.12 1.00
1.3 训练方法
1.3.1 对照组训练方法 给予常规康复疗法指导,出院后自行进行康复训练。
1.3.2 Lokomat组训练方法 采用Lokomat下肢康复机器人训练,训练前测量患者腿部长度,调节绑带尺寸和机器人装置。(1)患者系数的调节:患者系数大致相当于患者的小腿长度,在训练过程中,患者系数的波动受其他训练参数的影响,如果其偏离于最佳位置,需要对相应参数进行及时调整。自动调整只有引导力>95%,减重<50%的情况下才能发挥作用。多数情况下需要治疗师手动调整。(2)速度的调节:当训练速度变动较大时,患者系数会发生偏离,这时一方面可以通过适当增大或减少膝髋关节角度来调整,另一方面还可以通过计算机屏幕上的患者系数上调或下调按钮来直接调整。需要注意的是,每次训练的速度要根据患者的运动能力适当变化,不要波动太大,如果增加的速度超过患者的实际运动能力,患者系数很难调节到合适位置,这时需要适当减速。此外,训练速度不变,如果引导力的调整与患者的运动能力不合适,或患者主动用力的方向和大小偏离于Lokomat引导的步行模式时,患者系数也可以出现较大的波动,这时除治疗师及时对患者口头鼓励指导外还可以通过适当改变引导力来调整。(3)引导力的调节:引导力大小的设置要根据患者下肢的肌力,如果设置太高,不利于患者的主动参与及肌力训练。如果设置太低,患者感觉下肢沉重,步行吃力,因此训练过程中达不到调整的髋膝关节角度,致使步长缩短。因此,不同的患者或同一患者有不对称的下肢肌力时要选择不同的引导力。每周进行3次训练,30 min/次,5周为1个疗程,共进行2个疗程。
1.4 评价方法 训练前及训练10周后通过简式Fugl-Meyer下肢功能量表、L-ROM、L-FORCE和L-STIFF分别对其下肢运动功能、关节活动度、肌力及肌张力进行评测。
1.4.1 简式Fugl-Meyer下肢运动功能量表 评测下肢运动功能,上肢最高分66分,下肢最高分34分[5]。
1.4.2 关节活动度的测量 关节活动度由瑞士HOCOMA医疗器械公司生产的L-ROM进行测量。患者在没有进行Lokomat动力支持的情况下,精确测量髋部和膝部关节的被动活动范围。训练前后均在肌肉完全松弛的情况下,通过测量由外力使关节运动时所通过的运动弧度来完成关节活动度的评测。关节运动范围为中立位,髋关节:屈曲0°~125°、伸展0°~15°,膝关节:屈曲0°~150°、伸展0°。
1.4.3 肌力及肌张力的评定 由瑞士HOCOMA医疗器械公司生产的L-FORCE和L-STIFF检测4个肌肉群:左腿和右腿的臀部屈肌、臀部伸肌、膝部屈肌和膝部伸肌。肌力:由Lokomat评估系统中L-FORCE进行评定,患者被动地移动双腿到与臀部成30°和膝弯曲45°,然后固定在这个位置上,要求患者在倒计时结束时,在指示的运动方向上使用最大的力量,测试患者髋关节的前屈 (L-FORCE/HIP/Flex,简称FHF)、后伸 (L-FORCE/HIP/Ext,简称FHE)功能,膝关节的前屈 (L-FORCE/KNEE/Flex,简称 FKF)、后伸 (LFORCE/KNEE/Ext,简称FKE)功能。肌张力:由Lokomat评估系统中 (L-STIFF)进行评定,测试患者被动运动时的僵硬程度,髋关节的前屈 (L-SORCE/HIP/Flex,简称SHF)、后伸 (L-SORCE/HIP/Ext,简称SHE),膝关节的前屈 (LSORCE/KNEE/Flex,简称 SKF)、后伸 (L-SORCE/KNEE/Ext,简称SKE)。
1.5 统计学方法 采用SPSS 13.0统计软件进行分析。计量资料以 ((±s)表示,组间比较采用t检验。以P<0.05为差异有统计学意义。
2 结果
2.1 两组患者Fugl-Meyer下肢运动功能量表评分比较 两组患者训练前Fugl-Meyer下肢运动功能量表评分比较,差异无统计学意义 (P>0.05);训练后Fugl-Meyer下肢运动功能量表评分比较,差异有统计学意义 (P<0.05,见表2)。
表2 两组患者Fugl-Meyer下肢运动功能量表评分比较 ((±s,分)Table2 Comparison of scores of Fugl-Meyer lower limb between two groups

表2 两组患者Fugl-Meyer下肢运动功能量表评分比较 ((±s,分)Table2 Comparison of scores of Fugl-Meyer lower limb between two groups
组别 例数 训练前 训练后对照组20 14.9±1.0 23.6±3.6 Lokomat组 20 15.1±2.1 30.0±3.1 t 值0.39 0.07 P值0.70 0.00
2.2 两组患者髋、膝关节活动度比较 两组患者训练前髋、膝关节活动度比较,差异无统计学意义 (P>0.05);训练10周后髋、膝关节活动度比较,差异有统计学意义 (P<0.05,见表3)。
2.3 两组患者肌力及肌张力比较 两组患者训练前下肢肌力及肌张力比较,差异均无统计学意义 (P>0.05);训练10周后下肢肌力及肌张力比较,差异均有统计学意义 (P<0.05,见表4)。
表3 两组患者关节活动度的比较 (±s,°/s)Table3 Comparison of joint motion between two groups

表3 两组患者关节活动度的比较 (±s,°/s)Table3 Comparison of joint motion between two groups
组别 例数 髋关节活动度训练前 训练后膝关节活动度训练前 训练后对照组20 8.9±0.7 18.3±2.2 22.3±1.3 22.0±0.7 Lokomat组 20 8.9±0.9 20.6±1.2 22.9±1.2 26.1±1.2 t 值 -0.38 4.17 1.52 0.14 P值0.71 0.00 13.73 0.00
表4 两组患者肌力及肌张力的比较 (±s,N.m/°)Table4 Comparison of strength and muscle tension between two groups
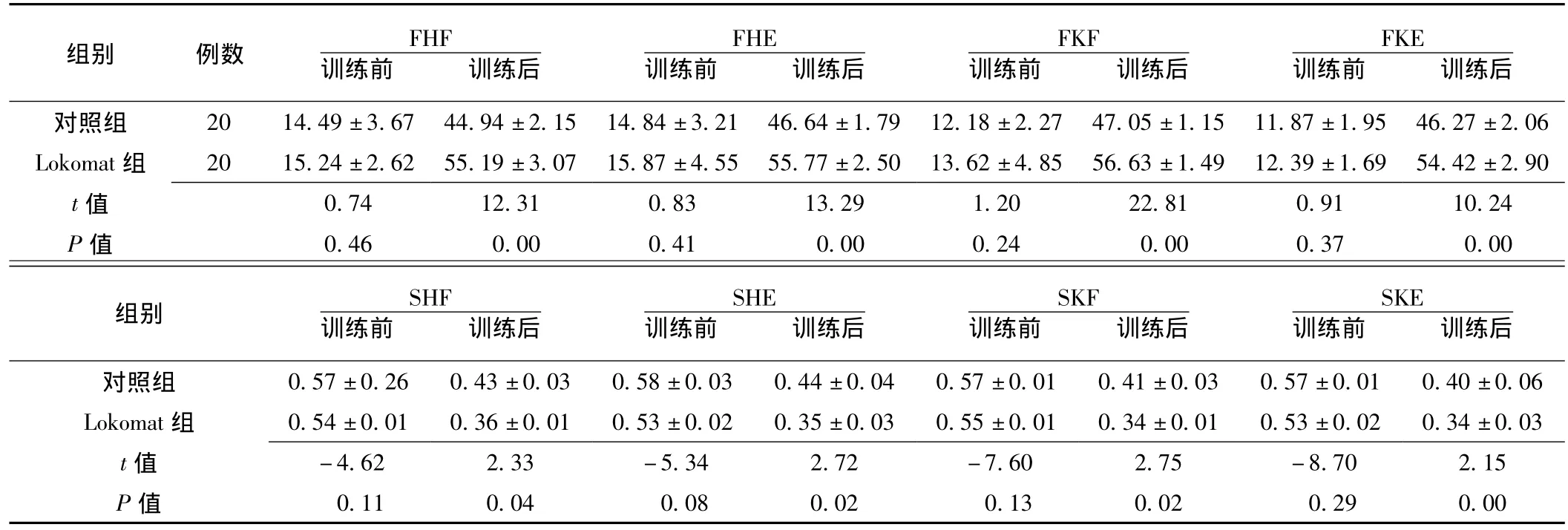
表4 两组患者肌力及肌张力的比较 (±s,N.m/°)Table4 Comparison of strength and muscle tension between two groups
注:FHF=髋关节前屈肌力,FHE=髋关节后伸肌力,FKF=膝关节前屈肌力,FKE=膝关节后伸肌力,SHF=髋关节前屈肌张力,SHE=髋关节后伸肌张力,SKF=膝关节前屈肌张力,SKE=膝关节后伸肌张力
组别 例数 FHF训练前 训练后FHE训练前 训练后FKF训练前 训练后FKE训练前 训练后对照组 20 14.49±3.67 44.94±2.15 14.84±3.21 46.64±1.79 12.18±2.27 47.05±1.15 11.87±1.95 46.27±2.06 Lokomat组 20 15.24±2.62 55.19±3.07 15.87±4.55 55.77±2.50 13.62±4.85 56.63±1.49 12.39±1.69 54.42±2.90 t 值0.74 12.31 0.83 13.29 1.20 22.81 0.91 10.24 P值 0.46 0.00 0.41 0.00 0.24 0.00 0.37 0.00组别 SHF训练前 训练后SHE训练前 训练后SKF训练前 训练后SKE训练前 训练后对照组 0.57±0.26 0.43±0.03 0.58±0.03 0.44±0.04 0.57±0.01 0.41±0.03 0.57±0.01 0.40±0.06 Lokomat组 0.54±0.01 0.36±0.01 0.53±0.02 0.35±0.03 0.55±0.01 0.34±0.01 0.53±0.02 0.34±0.03 t 值 -4.62 2.33 -5.34 2.72 -7.60 2.75 -8.70 2.15 P值0.11 0.04 0.08 0.02 0.13 0.02 0.29 0.00
3 讨论
脑卒中患者发病后最常见的功能障碍是肢体功能障碍,其引起的偏瘫是由于上运动神经元受损,从而使原始的、被抑制的、低位中枢的运动反射释放,引起运动模式异常,表现为肢体肌张力增高,肌群间协调紊乱,出现联合反应、共同运动和紧张性反射等脊髓水平的运动形式,其恢复过程是一种肌张力和运动模式不断衍变的质变过程,从而出现肢体运动功能障碍[6]。
各关节的运动是通过相关肌群的收缩和放松产生关节运动,步行中下肢关节同样也是通过主要肌群的运动而引起的。徐光青等[7]利用髋、膝、踝在步行中关节变化范围来判断康复的疗效,经训练后患侧膝、踝关节活动范围增加明显,而髋关节则由于训练后伸髋增加、屈髋减少,患者下肢功能显著改善。本研究结果显示,利用Lokomat机器人系统对关节活动度进行评测,训练后两组患者髋、膝关节活动度范围的弧度有所加大,且Lokomat组患者的关节活动度弧度明显大于对照组。表明下肢康复机器人训练对提高脑卒中偏瘫患者的下肢关节活动度具有显著的促进作用。其原因一方面为矫正器带动患者腿部在跑台上运动,可实现大幅度的步态训练;另一方面为在训练过程中患者的双腿在跑步台上大幅度的向前迈步,从而促进髋、膝关节的分离运动,增强了患侧下肢的负重能力。
近年来的研究均表明,肌力缺乏是导致偏瘫肢体运动障碍的主要原因[8]。但卒中后如何使偏瘫肢体较早产生主动收缩,实现运动控制以及痉挛后发生严重功能问题始终未有突破性进展[9]。Bolliger等[10]研究结果表明,Lokomat等长肌力评价系统是一种非常有效的工具,可以对使用驱动步态矫形器患者的康复进程进行记录和控制。本研究中利用 Lokomat的L-FORCE对肌力进行测量,训练后髋、膝关节肌力有所增加。其原因是:通过对臀大肌、股四头肌收缩,使髋膝伸展,维持身体前后方向稳定,防止屈曲;膝关节的屈肌和伸肌的训练,以保持膝关节的稳定性。说明缺血性脑卒中患者的偏瘫侧下肢肌力明显影响着患者的下肢运动功能,合理地评价和改善偏瘫侧肌力对下肢运动功能的改善具有重要意义。Iverson等[11]研究报道等长肌力训练能增强肌力。而且对患侧肢体进行肌力增强训练的重要性也已经得到了认可[12]。脑卒中患者肌张力增高是低位神经中枢的代偿性改变,具有一定的意义,而过高的肌张力易产生痉挛[13]。传统观念认为力量弱是由拮抗肌痉挛引起,肌力训练被认为会增加痉挛、加重异常模式[14]。但本研究表明在进行机器人康复训练时,下肢伸髋、屈髋、伸膝和屈膝在重复进行着分离的动作,其向前蹬离的动作使下肢伸屈肌力得到强化和协调性训练,有助于使肌力增强并且降低痉挛。经过训练后,Lokomat组下肢痉挛有所降低,较对照组明显改善,而且运动功能也较对照组明显改善。因为利用Lokomat的L-STIFF对痉挛状态进行测量时,在步态训练过程中,如果患者痉挛强度过大,机器人将自动停止运行,以避免关节受损或肌肉拉伤。因此下肢康复机器人训练对缺血性脑卒中后肌力肌痉挛的改善有良好的效果。
综上所述,下肢康复机器人训练可在一定程度上增强肌力,缓解肌痉挛,进而起到改善关节活动度的作用,但其长期疗效尚有待进一步观察研究。其反馈训练可提高患者训练的兴趣和动力。评估工具可以对患者的改善范围得到简单和可重复的测量结果,有利于增强患者训练信心和采用最优的控制模式及高级的控制策略。
1 徐光青,黄东锋,兰月,等.脑卒中患者下肢关节运动对步行能力影响的三维运动学研究[J].中国临床康复,2004,8(31):6816-6818.
2 谢欲晓,白伟,张羽.下肢康复训练机器人的研究现状与趋势[J].中国医疗器械信息,2010,16(2):5-8.
3 丁敏,李建民,吴庆文,等.下肢步态康复机器人:研究进展及临床应用[J].中国组织工程研究与临床康复,2010,14(35):6604-6607.
4 中华神经病学会.各类脑血管疾病诊断要点[J].中华神经外科杂志,1996,29(6):379-380.
5 黄怡,潘翠环,万新炉,等.重复性下肢训练对脑梗死患者下肢功能改善的作用[J].中国康复,2009,24(3):167-168.
6 邵天民,马立军,刘吻,等.运动再学习方案对脑卒中患者下肢运动功能的影响[J].中国康复医学杂志,2006,21(5):404.
7 徐光青,黄东锋,毛玉瑢,等.脑卒中患者步行时躯体运动的三维运动学研究[J].中国康复医学杂志,2004,19(10):728-729.
8 杨杰华,张盘德,周惠嫦,等.视觉反馈等速肌力训练在偏瘫患者下肢运动功能康复中的应用[J].中国康复医学杂志,2009,24(11):1012-1014.
9 徐英.电生物反馈治疗对老年脑卒中患者下肢肌力的疗效观察[J].四川医学,2011,32(11):1801-1802.
10 Bolliger M,Banz R,Dietz V,et al.Standardized voluntary force measurement in a lower extremity rehabilitation robot[J].J Neuroeng Rehabil,2008,5:23.
11 Iverson BD,Gossman MR,Shanneau SA,et al.Balance performance,force production,and activity levels in noninstitutionalized men 60 to 90 years of age[J].Phys Ther,1990,70(6):348-355.
12 谢远见,瓮长水,毕胜,等.脑卒中患者患侧下肢肌力与步行速度和步行独立性的关系[J].中国临床康复,2003,7(10):1532-1533.
13 王桂茂,齐瑞,严隽陶,等.中风偏瘫步态的生物力学及其运动学特征分析[J].中国组织工程研究与临床康复,2007,11(40):8169-8172.
14 朱燕,丁莹,强乙,等.不对称性等速肌力训练对恢复期偏瘫患者上肢运动功能的影响[J].中国康复,2011,26(3):174-176.
