非接触障碍检测技术在清筛机污土带避障中的应用
2013-09-05胡传亮高春雷王发灯周佳亮
胡传亮,高春雷,王发灯,周佳亮
(1.北京大型养路机械运用检修段,北京 100071;2.中国铁道科学研究院铁道建筑研究所,北京 100081)
道砟清筛机是用来清筛道砟的大型养路机械,将脏污的道砟从枕底挖出,筛分后,将清洁道砟回填至道床,通过污土输送装置将筛出的污土清除到线路外。
清筛机作业时,经常发生碰倒接触网支柱的事故,各铁路局也自行开发了多种安全保障装置,但是由于稳定性低和智能化程度不高,没有得到推广使用,现场主要还是依靠人眼观察,存在重大安全隐患。为解决清筛机作业时避让污土带的问题,迫切需要一套可靠的清筛机污土带避障系统。本文介绍了研发的自动避让接触网支柱的避障系统。
1 清筛机污土输送装置避障系统
1.1 避障系统的要求
避障系统应实现双重非接触测量,①精度保证,采用激光和超声波两种非接触检测技术,激光测量可以保证精度,超声波能穿透灰尘和小颗粒物,保证了测量可靠性;②响应速度快,如果系统检测到障碍物,将会在300ms内做出判断;③可靠性高,采用嵌入式系统软硬件,保证系统的高性能、高可靠性和高稳定性;④能实现自动避让的智能化要求。
1.2 传感器件的选择
激光传感器单色性好,方向性强,电子线路和半导体可集成化,可昼夜工作,测距精度高。超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求。
避障系统采用激光和超声波两种非接触式传感器检测障碍物的位置。激光测距传感器扫描角度可达180°,角度分辨率为0.25°,距离分辨率为10mm,测量精度为±60mm,最大扫描距离为30m。超声波传感器的扫描角度为10°,距离分辨率为10mm,最大探测范围为8 m。
通过测量污土带转角,计算污土带最远端位置,判断污土带位置。考虑到现有清筛机的安装方便,本系统研发了以绝对编码器为基础的污土带转角测量结构,如图1所示,从动轮和绝对编码器通过联轴器连接在一起。
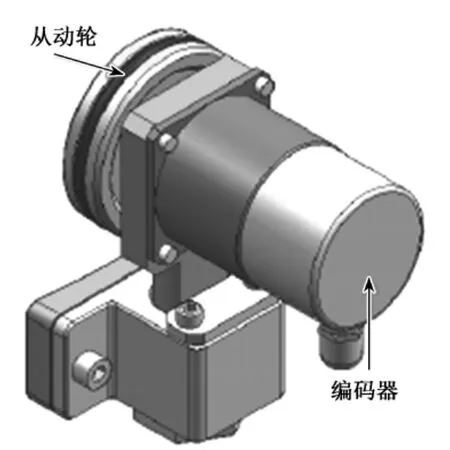
图1 污土带位置检测传感器
1.3 核心控制器件的选择
考虑避障系统的成本及使用要求,选用了嵌入式微处理器 DSPIC30F6012、嵌入式操作系统 Windows XP Embedded,嵌入式系统是一种“完全嵌入到受控器件内部,为特定应用而设计的专用计算机系统”。专用的嵌入式系统能保证系统的高性能、高可靠性和高稳定性。
1.4 硬件系统构成
硬件系统如图2所示,本系统采用激光扫描技术和超声波探测技术对障碍物进行非接触式检测;采用自主研发的传感器对污土带作业的最远端位置进行检测;采用高性能的处理器件对数据进行处理和分析,采用监控图像辅助系统避障。
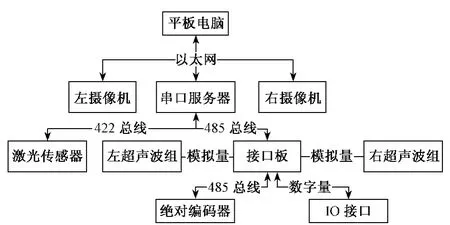
图2 硬件系统框图
1.5 传感器件的布置
传感器布置主要包括一个sick激光传感器总成、两个超声波传感器总成、两个摄像机总成和一个转角测量装置。激光传感器总成安装于清筛机左侧车头大灯上部,两个超声波总成和摄像机总成分别安装于清筛机左侧和右侧大灯上部,转角测量结构安装于右侧抛污带旋转基座上。共6个超声波传感器圆形分布,每两个间的夹角为8°,当输送装置向前进方向的左侧输送污土时,左侧传感器1~3进行循环检测,当输送装置向前进方向的右侧输送污土时,传感器4~6循环检测;由于每个超声波传感器的中心角为10°,每组单独工作时,覆盖区域为26°范围,在该区域内的障碍均有多次被检测到的机会,所以不容易漏测。清筛机左侧传感器的具体安装位置如图3。

图3 传感器的布置
2 系统工作原理
避障系统需要检测的项目有障碍物和污土带位置。
对于障碍物检测,为更好地保证障碍检测的可靠性,采用激光传感器与超声波传感器组同时检测,根据两种检测方式对障碍物信息进行智能判定,由上位机控制系统对障碍物的位置数据进行处理,通过回转机构收回污土输送带最终实现避障,避免输送带碰倒接触网支柱,从而提高清筛机作业时的安全性。两种检测系统各有优缺点,激光检测精度高范围广,但是易受灰尘的影响,适用于在灰尘较小的情况下使用。超声波检测可以不受灰尘的影响,可以全天候工作。本系统为了提高人机交互性,增加了摄像机监视系统,可以根据数字图像上的等距线直观判断障碍物的位置。
对于污土带位置的检测,本系统采用间接检测方法,通过检测污土带的转角,计算污土带最远端的位置。清筛机的整个污土带可以视为一个刚体,污土带上的每一点在相同的时间内相对于污土带的旋转中心转过的角度相同。污土带的转角测量目的就是测量污土带上某一点的转角。转角测量结构的安装位置如图4所示,设从动轮的半径为r,接触点到污土带旋转中心半径为R,绝对编码器输出的角度为φ,则污土带接触点的转角为
金枝君的“非自由恋爱”,是以为男女间的特殊关系,只有自由满足性欲的一件事情;至于恋爱应该是人与人普通的关系。并且他那篇文章里“满足性欲”等字样,原文本都做“交门”,是我代他改了的。所以金枝的主张实在和存统一样,“废婚后男女完全自由交门”,本不能说他浑朴。祖基君对于金枝君底论文,稍有误解;但他解释自由恋爱的意义,我认为很有研究的价值。

式中,φ0为污土带位于线路中心位置时绝对编码器输出的角度;θ即为污土带的转角,顺时针为正。
根据图5可得最远端(xb,yb)坐标的计算公式为

式中,γ=atan(2L/d),L为污土带长度,d为污土带宽度,S为污土带旋转中心到端板的距离。

图4 污土带安装位置
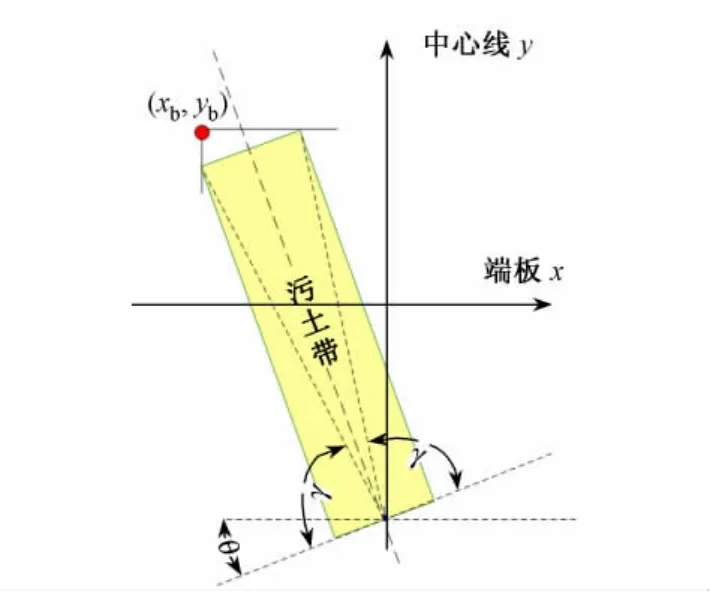
图5 污土带最远端
3 避障算法
本系统的避障原理包括四个步骤。
1)计算污土带最远端坐标(xb,yb)
绝对编码器检测到污土带的转角θ,根据公式(2)可得最远端(xb,yb)的位置。
2)计算物体危险点坐标(xz,yz)
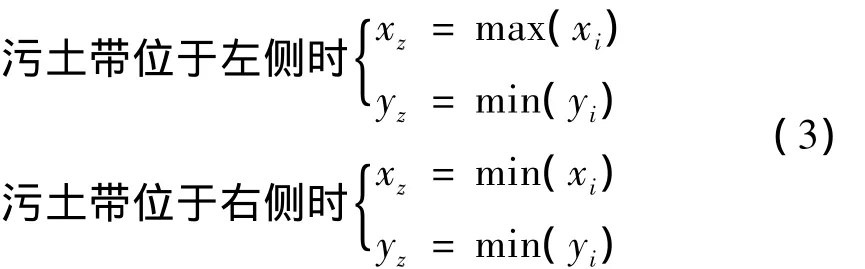
假设超声波检测到的物体距超声波安装位置的距离为R_CHAO,则物体的位置应该在超声波的扫描角φ范围内,即在中心角为φ、半径为R_CHAO的圆弧上。根据超声波的安装角度,可以计算出圆弧上两个端点的坐标(x1,y1)和(x2,y2),则超声波传感器检测的危险点坐标为
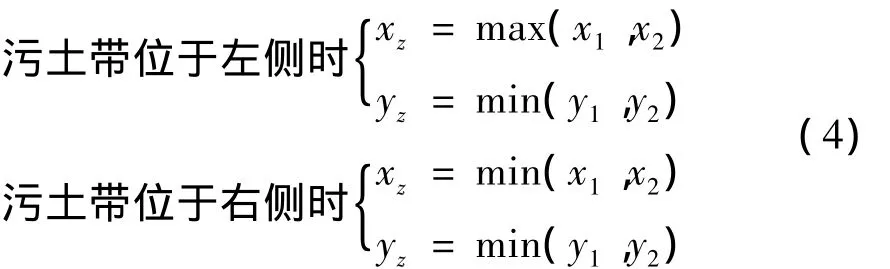
3)危险区域划分
当污土带在左侧时,危险区域为

当污土带在右侧时,危险区域为

其中D和L为安全距离参数,D与检测精度有关,L与清筛机行车速度有关。危险区域见图6。
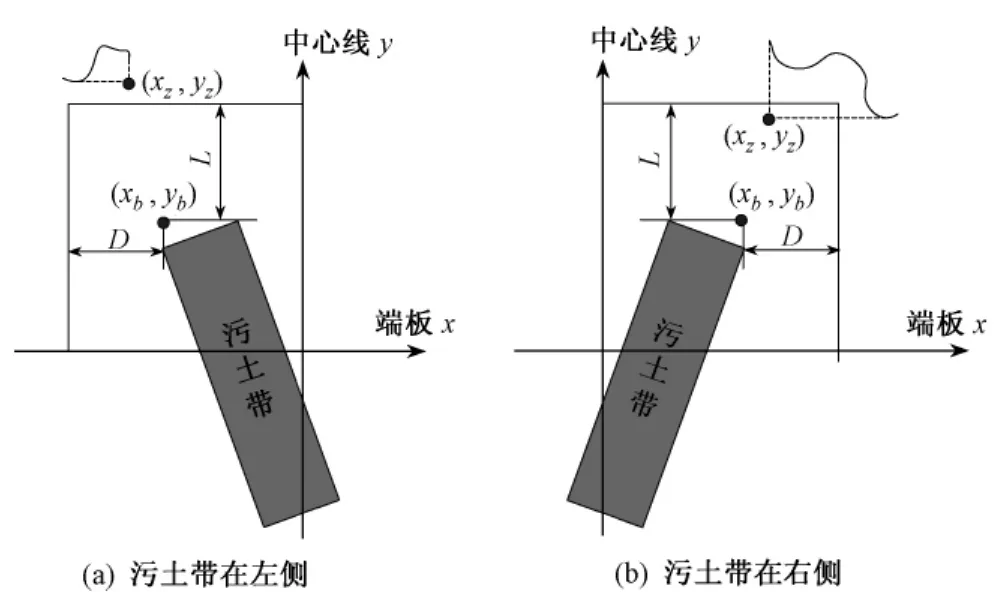
图6 危险区域
4)障碍判断
当物体危险点(xz,yz)进入了危险区域则构成障碍,给出声光报警信号,当物体危险点(xz,yz)不在此区域内则视为安全。
4 系统软件设计
系统软件采用C语言进行开发,采用模块化设计,分为单片机模块和计算机模块两部分。单片机程序如图7所示。
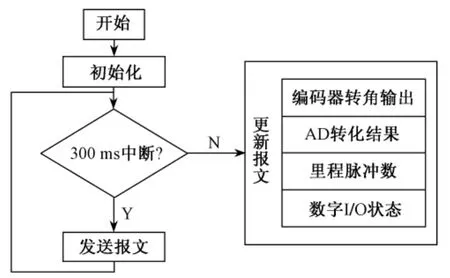
图7 单片机程序
单片机负责模拟量的采集、数字I/O处理、里程脉冲计数和绝对编码器(RS485接口)数据的接收,最后将处理结果打包传输给计算机。单片机采集的模拟量为超声波的输出,数字量输入包括清零信号、关机信号、车体前进信号、车体后退信号,数字量输出包括声光报警信号、停车信号、启动激光传感器信号、启动超声波传感器信号。
计算机软件在嵌入式操作系统平台上运行,采用VC语言进行编制。系统具体的软件框图如图8所示。在主程序中开启三个线程,图像采集线程采集网络摄像机的数字图像,并将采集结果保存到全局内存中。
图8 计算机软件
串口处理线程由硬件自动触发,将接收到的串口数据自动保存到全局变量数组里,数据处理线程则由串口处理线程发送消息控制,接收一帧串口数据后,调用全局内存中数字图像数据,并对相关数据进行计算、显示和保存。
5 结束语
本系统采用了激光和超声波两种非接触式检测技术对障碍物进行检测;采用了数字图像监控技术,辅助清筛机驾驶员避障,提高了系统的交互性;采用了自主研发的污土带转角传感器,实现对现有清筛机污土带的测量;采用了可靠的避障算法,保障清筛机作业的安全,提高避障系统预警能力;采用了高性能处理器,适应车体振动环境;采用嵌入式系统,提高了系统的速度和稳定性。
清筛机污土带避障系统从检测技术、避障算法到系统硬件和软件都是经过精心调研和技术论证的。本系统可以在白天、黑夜、风、雨、雪、漫天尘土等恶劣环境下使用,具有较高的可靠性。此系统解决了清筛机污土带安全生产避障问题,能产生良好的社会和经济效益。
[1]寇长青,宋慧京.全断面枕底清筛机[M].北京:中国铁道出版社,1998.
[2]赵珂.高精度超声波测距仪的研制[J].传感器技术,2003,22(2):55-57.
[3]高春雷,王发灯.清筛机污土输送装置避障系统的设计[J].铁道建筑,2007(8):97-99.
