汽车主动悬架模糊控制方法研究
2013-09-04陶业英高嵩
陶业英 高嵩
(武汉理工大学现代汽车零部件技术湖北省重点实验室)
1 前言
最早的主动悬架控制算法参照天棚(sky-hook)原理,是在车身和汽车惯性参考点之间加一阻尼器[1],这种控制算法简单,在国外某些车型上已经得到了应用。随着现代控制理论的发展,提出了主动悬架的最优控制方法[2],它比天棚原理考虑了更多的变量,控制效果更好。由于实际悬架系统中有许多非线性的、时变的、高阶动力系统,使最优控制方法变得不稳定,为此又发展了自适应控制方法。自适应控制方法具有参数识别功能,能适应悬架载荷和元件特性的变化,自动调整控制参数,保持性能最优[3]。尽管自适应控制方法有上述优点,但当被控对象具有模型不确定性时,其控制结果不一定有效。为此,以车身速度与加速度为控制变量,采用混合型模糊PID控制作为控制方法,有效提高了汽车行驶平顺性。
2 路面谱和1/4主动悬架模型的建立
2.1 路面不平度功率谱
采用宽带限幅白噪声作为路面激励,则路面垂直方向位移为:
式中,n0为参考空间频率;G0(n0)为参考空间频率n0下的路面功率谱密度值;w(t)为单位白噪声;v为车速;t为时间;x0(t)为路面垂直方向位移。
路面输入模型如图1所示。
当车辆以50 km/h速度行驶在C级路面上时,n0=-0.1 m-1,G0(n0)=256×10-6m3。 将上述各参数带入式(1),并通过图1模型模拟得到图2所示的路面垂直位移曲线。
2.2 1/4主动悬架模型
在能够反映主动悬架控制器控制策略的前提下,为减少主动悬架控制参量,建立1/4主动悬架力学模型(图3),根据牛顿定理得到悬架系统的状态方程(不计轮胎阻尼)为:
式中,ms=240kg为簧上质量;zs、zu为车身位移;mu=24 kg为簧下质量;bs=1000Ns/m为悬架阻尼;ks=9475 N/m为悬架刚度;kt=85270 N/m为轮胎刚度;Fa为主动力。
式中,x1为弹簧变形量;x2为簧上质量绝对速度;x3为轮胎压缩量;x4为簧下质量速度。
可以得到主动悬架的状态空间方程为:
3 混合型模糊PID控制器设计
3.1 混合型模糊PID控制器控制原理
模糊控制系统是以模糊数学、模糊语言形式的知识表示和模糊逻辑的规则推理为理论基础,以具有智能性的模糊控制器为核心,采用计算机控制技术构成的一种具有反馈通道的闭环结构的数字控制系统[2,4]。
混合型模糊控制器由1个常规PI控制器和1个二维的模糊控制器并联构成(图4)。常规PI控制器输出为ui=KI>ei,与二维模糊控制器输出控制量uf相叠加,作为混合型模糊PID控制器的总输出un,即un=uf+ui。这种混合型模糊PID控制器不仅可消除普通模糊控制器所产生的极限环震荡,而且可完全消除系统余差[5]。
3.2 PI控制器参数设定方法
PID控制器由比例系数kp、积分作用系数ki和微分作用系数kd组成[6]。在混合型模糊PID控制器中,选用PI控制器即可满足系统要求,这里仅选取kp和ki进行参数调节。
比例系数kp可加快系统的响应速度,提高系统的调节精度,但kp过大会导致系统超调,甚至会导致系统不稳定。积分作用系数ki可消除系统的稳态误差,但ki过大会使系统在响应过程初期产生积分饱和,从而引起响应过程的较大超调。
利用试凑法调节参数kp和ki。令ki=0,逐步增加kp值,在系统不产生超调的前提下,使系统的响应速度加快;调整ki值和微调kp值,在保证响应速度快的前提下,使系统有较小的稳态误差。最终确定 kp=1000,ki=500。
3.3 模糊规则的确定
根据主动悬架状态空间方程,取车身速度Z˙与车身加速度Z¨作为模糊控制器的输入量,主动力Fa为输出量,分别对应系统的误差E、误差变化率EC和输出量V。设定系统输入量Z˙和Z¨模糊集为A=B=(NB,NS,ZO,PS,PB),输出量 Fa模糊集为 C=(NB,NM,NS,ZO,PS,PM,PM)。根据被动悬架在路面谱激励下的车身速度、加速度值确定各模糊子集隶属度函数论域区间,以便于系统参数调节,见图5。以减小车身速度、加速度为前提,由语言规则Ri:if E is Aiand EC is Bithen V is Ci制定模糊控制规则表,模糊逻辑推理采用mamdani法,见表1。
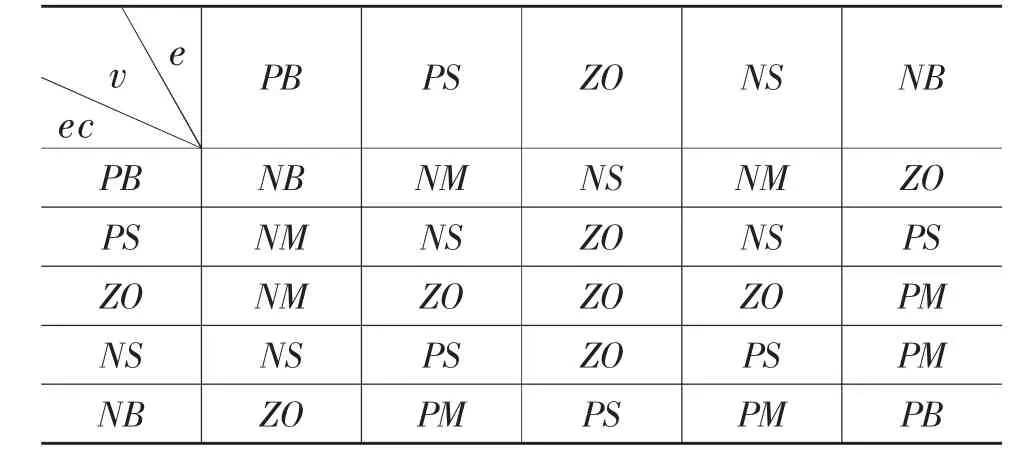
表1 基于mamdani法模糊控制规则表
3.4 混合型模糊PID控制器的建立
在Amesim中建立主、被动悬架的力学模型(如图6),在MATLAB/Simulink中搭建混合型模糊PID控制器。
如图 4 所示,输入定值 Vd(t)和实际输出值 V(t)构成控制偏差 e(t):
输入定值 Vd(t)为车身速度期望值。 令 Vd(t)=0,V(t)为车身速度,则 e(t)=-误差变化率 ec(t)=-
PI控制器的控制规律表达式为:
模糊控制器将控制偏差e(t)及误差变化率ec(t)模糊化为模糊集,通过模糊规则R运算和解模糊化得到最终输出量为:
将模糊控制器结果与PI控制器结果叠加,即为系统输出主动力Fa值。
4 主动悬架仿真及结果分析
为显示混合型模糊PID控制器的控制效果,在相同的路面激励下,将PI控制和混合型模糊PID控制下的主动悬架与被动悬架搭建在同一模型中,见图7。在MATLAB/Simulink中得到在10 s激励内各系统车身速度曲线和加速度曲线(图8)、加速度均方根值和车轮动载荷。表3为各输出值比较。
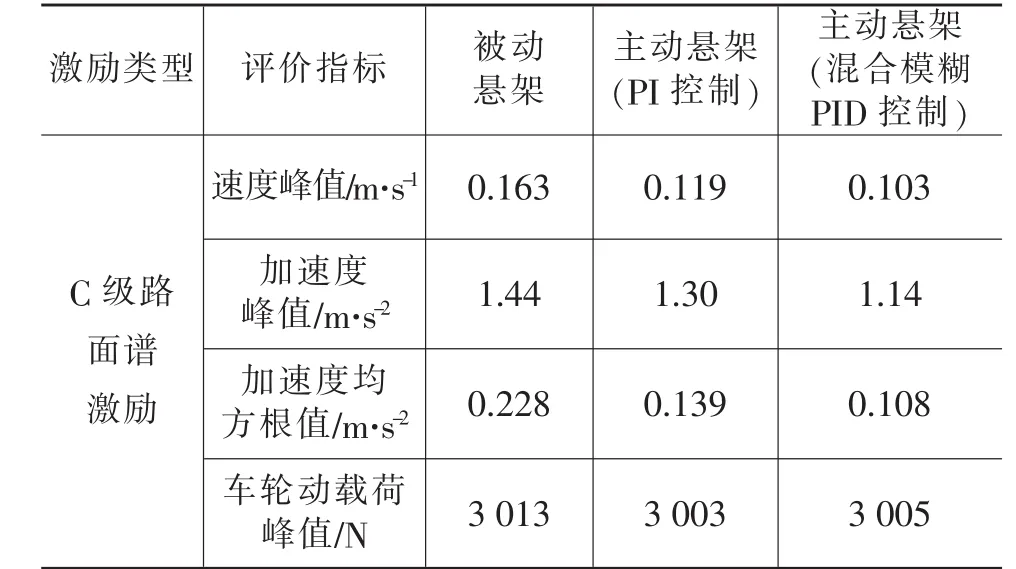
表3 输出值比较
由表3可知,PI控制器与混合型模糊PID控制器均可使悬架系统得到快速反应,车身速度峰值分别减小了27.0%和36.8%,加速度峰值分别减小了9.7%和20.8%,加速度均方根值分别减小了39.0%和52.6%。2种主动悬架控制方法使汽车舒适性得到提高,车身速度峰值与加速度均方根值有较大幅度降低。但是在加速度峰值的控制上,PI控制器控制效果不如混合型模糊PID控制器控制效果。主动悬架与被动悬架的车轮动载荷大小相当,说明力发生器产生的主动力对车轮影响不大。
从3个车身输出量之间的关系分析,加速度均方根值与速度峰值均为加速度的积分量,属于系统稳态误差,加速度值表现为系统的动态特性。与PI控制器相比,混合型模糊PID控制器能根据模糊规则有条件地改善系统的动态特性,在响应过程中抑制偏差向任何方向的变化,对误差变化提前预警,所以混合型模糊PID控制器能够更有效地降低车身加速度峰值,也可减小速度峰值与加速度均方根值。
5 结束语
混合型模糊PID控制器结合了PID控制器与模糊控制器的优点,可对悬架系统的动态特性进行有选择调节,根据不同路况对悬架系统及时反馈,提高了车辆的行驶平顺性和乘坐舒适性,且主动悬架产生的主动力对车轮动载荷的影响不大,不会对汽车行驶安全性产生不良的影响。仿真结果表明,主动悬架产生的主动力对车轮动载荷的影响不大,不会对汽车行驶安全性产生不良影响。
1 郝赫.半主动悬架控制方法的研究:[学位论文].沈阳:东北大学机械工程与自动化学院,2008.
2 闻新,周露,李东江,等.模糊逻辑工具箱的分析与应用.北京:科学出版社,2002.
3 郭孔辉,王金珠,郭耀华,等.基于混合阻尼控制的车辆半主动悬架可调性研究.汽车技术,2013(3):1~4.
4 Pekgokgoz R K,Gurel M A,Bilgehan M.Active suspension cars using fuzzy logic controller optimized by genetic algorithm.International Journal of Engineering and Applied Sciences,2004,4(2):27~37.
5 诸静.模糊控制原理与应用.北京:机械工业出版社,1995.
6 刘金琨.先进PID控制MATLAB仿真(第3版).北京:电子工业出版社,2011.
