基于机载 LiDAR的数字电网巡线应用研究
2013-08-29蓝增荣胡庆武隆华平
蓝增荣 胡庆武 隆华平
(1.广州建通测绘技术开发有限公司,广东 广州 710064;2.武汉大学遥感信息工程学院,湖北 武汉 430079)
智能电网是建立在集成的、高速双向通信网络的基础上,通过先进的传感和测量技术、先进的设备技术、先进的控制方法以及先进的决策支持系统技术的应用,实现电网的可靠、安全、经济、高效、环境友好和使用安全的目标。为实现智能电网的建设,建立详细、三维的数字电网数据库是一项关键的基础性工作。机载激光雷达技术作为新一代遥感技术,以激光脉冲作为测量媒介,高度集成GPS、INS以及激光扫描测距仪等先进设备[1]-[3],可快速获取高精度的目标三维坐标,凭借激光脉冲穿透性好的优势,可快速探测植被下的地表信息,用来建立三维数字电网数据库。进一步获取电力线及其走廊环境内的地表物高精度三维坐标,利用该坐标数据对电力线进行快速准确地矢量化,并计算电力线与地表物的间距,从而实现对电力线安全运行的检测。与传统的摄影测量技术相比,机载激光扫描技术不仅测量精度高、数据处理快、而且可节省大量的人力、物力、时间及经费,大大提高作业效率。尤其是在植被茂密的山区,其优势更加明显。本文对基于机载LiDAR的电力巡线应用进行系统研究,提出了基于输电线路 LiDAR点云数据自动提取电力线的思路与方法。以南方电网LiDAR勘测项目为例,对基于LiDAR的电力线提取精度进行了试验分析,表明基于LiDAR可快速高精度建立三维数字电网数据库,满足智能电网应用要求。
1 数字电网巡线应用需求
电力巡线是电网运营维护管理部门需要进行的一项重要工作。为了确保电力线路的运营安全,通常需要定期对线路进行巡检,以便及时发现和排除安全隐患。随着我国经济高速发展,高电压、大功率、长距离输电线路越来越多,线路走廊穿越的地理环境也越来越复杂,如经过大面积的水库、湖泊和崇山峻岭,对其运行维护日趋困难[4]-[10]。对于数字电网巡线应用,主要需要解决以下问题:
(1)电力线及电力设施三维形体:需要动态获取电力线及电力设施的三维形态,为电网安全计算和分析提供数据支持,为了获得电网的实时形态,建立数字化的三维电网模型是各种电网巡线方法必须要解决的关键问题。
(2)快速获取高精度的数字地面模型,利用数字地面模型结合高分辨率正射影像构建三维数字电网走廊,为电网安全计算提供基础参考数据。
(3)快速获取高精度的地表物三维坐标以及植被,结合电力线及电力设施的三维模型,准确计算电力线与其附近树木、地表构造物的间距,从而确定电网危险线段。
可见,针对数字电网巡线应用的数据需求,传统的人工巡线、基于多光谱还是热红外摄影巡线技术无法满足电网巡线高精度定位需求,且无法一次获取电网安全计算的全方位数据。机载LiDAR技术可以通过激光测量多次回波在一次测量时同时获取电力线、电力设施、植被、地表构造物的三维坐标,在数字地面模型和高分辨影像支持下,实现高效、高精度巡线应用。
2 基于LiDAR点云的电力线安全要素提取和分析
为了进行电网安全计算和分析,必须要解决电力线安全计算所需要的电力线和植被等安全要素的提取和分析。其中,电力线可通过提取拟合得到,植被则采用滤波分析计算。
2.1 基于LiDAR点云的电力线提取
由于机载激光雷达测量技术测量的媒介是激光脉冲,其具有一定的发散性,故测量过程中其测量的地物标志往往与实际位置存有偏差,造成所获取的电力线点云并不是在一条线上,而是呈弯曲点线状(如图1),给电力线提取带来困难。
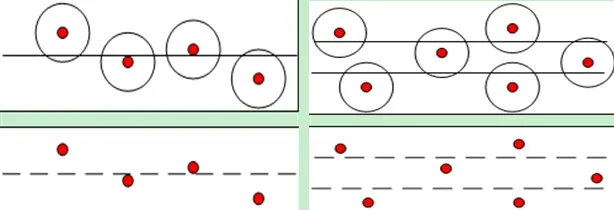
图1 基于LiDAR点云的电力线单双线测量示意图
为了从非规则、非线性的点云束中获得电力线几何参数,需要对电力线进行提取和拟合。基于LiDAR点云数据提取电力线包括以下步骤:
(1)电力线点云数据分类
提取电力线的第一个步骤首先是将电力线点云数据从所有点云中分类出来。由于点云数据除了三位坐标值外(有的附带点云强度信息),没有其他属性值。首先需要将电力线点云、铁塔点云及地表物点云与地面点云分开,通常可采用基于高程投影分割方法对电力线点云数据进行分类。
(2)电力线初步提取(提取大致走向和重要节点)
电力线点云数据提取后,根据其点云数据对电力线路的走向进行粗提取。跟踪相邻点云数据,将同一条线路上的点云数据识别出来。根据其电力线点云走向的斜率变化确定电力线初步节点,将其节点连接成多段线,即为初步电力线,初步电力线的作用就是确立电力线的基本走向和形状。
(3)电力线精提取(精确提取各节点)
根据提取的初步电力线按照实际电力线点云对其节点准确提取。确保电力线与点云的实际位置贴近程度更高、更准确。精确提取电力线节点的原理就是根据电力线点云束状垂直截面上点云坐标确立截面的中心点。如图2所示。图1中上左图为原始点云,从原始点云数据中提取电力线点云后(上中图),则根据电力线点云进行电力线初步提取(上右图)。根据提取的节点位置再进一步精确提取其节点(右下图),从而完成对整个电力线精确提取。
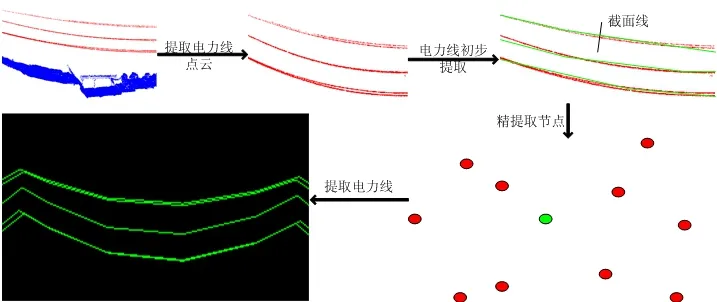
图2 提取电力线示意图
(4)电力线平滑
电力线提取后,其显示的仍然是一条多段线,因此最后的工作就是要对提取的多段线利用多元函数进行平滑处理,从而得到一条圆滑曲线,即最终电力线矢量化产品,如图 3所示。
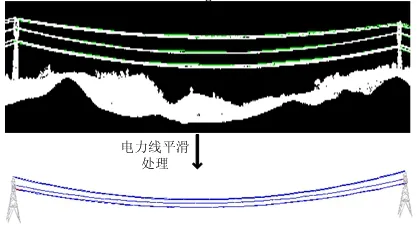
图3 平滑处理后的电力线状图
(5)电力线扩展
利用电力线点云束提取并拟合出的中间电力线,根据实际电力线相互之间的间隔对其进行扩展拟合,从而最终获取四根或八根电力线束。
2.2 基于剖面切割滤波方法植被分析
对于植被等地表物计算,需要通过点云滤波得到。目前,有多种点云过滤方法,比较典型的有:数学形态学方法、移动窗口、迭代线性最小二乘内插及基于坡度变化的滤波算法等。各算法具有自己独特的应用特点,针对不同地形各算法具有不同优缺点[11][12]。目前还没有一种算法可以实现全自动地进行滤波剔除地表物,大多还是基于人工干预过滤。剖面切割滤波方法是一种较常用的滤波方法。其滤波原理示意图如下图4。

图4 剖面切割滤波法原理示意图
图4中,L1表示切割基准线,L2表示平行于切割基准线的切割线,Ascent 表示切割基准线 L1的剖面角度,Delta表示切割基准线的长度。Hmax表示切割的阈值,也就是切割线与切割基准线间的垂直方向上的距离值,超过切割线以上部分的地表物就将被切割过滤掉。Ascent、Delta和Hmax为剖面切割滤波法的三个关键参数,针对不同地形情况选择不同的参数值。本文通过几组不同的参数值对植被进行滤波试验,确定平坦植被区域,其剖面角度和切割阈值相对要低些,尤其对于低植被区域,其剖面角度、切割阈值和切割线均应较小。当切割线与切割阈值一定时,剖面角度15°的过滤效果明显不如 5°。当剖面角和切割阈值相同的情况下,切割基线短的不如切割线长的过滤效果。当地形起伏较大时,其切割线不宜过长,采用该方法可以获得较好的植被分析结果。
3 试验结果分析
为了评价基于机载LiDAR的电力线提取拟合的精度,以TopSys Facon-II获取的南方电网电力巡线LiDAR点云数据进行了试验,试验段为广西来宾段机载LiDAR点云数据中的一段。其中,机载LiDAR点云数据的点密度为每平方米平均20个激光点。采用电力设计软件PLS拟合的电力线与基于点云数据自动化提取的电力线进行比较。由于PLS内附电力线的各种力学方程,属电力线路设计方面的国际知名软件,加以人工干预拟合,因此,其精度近似认为为 0,即其拟合的电力线坐标为真实电力线坐标。利用电力线点云提取的电力线与PLS拟合的电力线导入Cass软件里对其三维坐标进行比较,如图5。
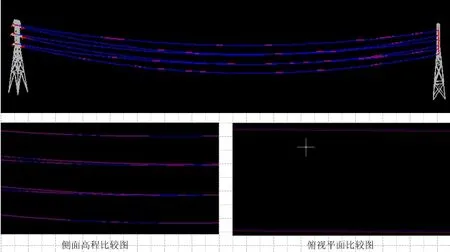
图5 电力线矢量化比较图
试验段电力线束截面直径在40cm左右。通过侧面和俯视面分别对两条电力线进行高程和平面位移差进行比较,从而得出两条线的位置差别,差值比较表如表1。
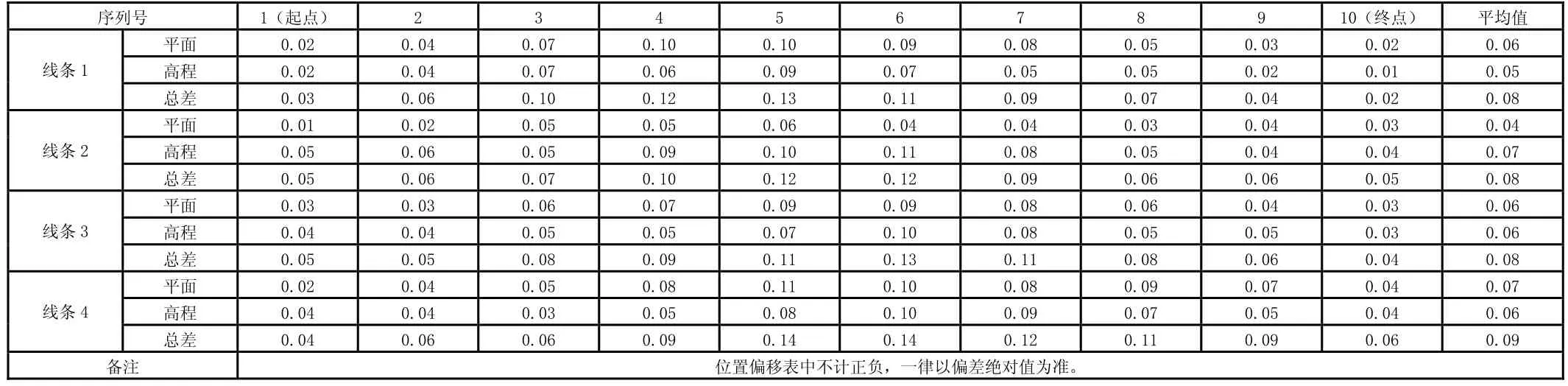
表1 PLS拟合线与自动提取电力线位置比较表(m)
由表1,基于LiDAR点云自动提取拟合的电力线平面和高程偏差基本上都在10cm以内,其偏差值在两端较小,中间较大,呈单峰分布(如图6),其主要原因可能由于中间段位电力线由于风力的影像而导致偏位较大,从而导致PLS拟合值与真实值有轻微偏动,最终导致自动提取的电力线与其手工拟合值偏动较大,但最终统计结果显示:其平面位置平均偏差分别为:0.06m、0.04m、0.06m、0.07m,高程平均偏差分别为:0.05m、0.07m、0.06m、0.06m,总偏差分别为:0.08m、0.08m、0.08m、0.09m。因此,我们可以得出结论:利用机载激光雷达获取的点云数据自动提取电力线的平面和高程误差在6cm左右,其总体误差在8cm左右。而对于截面直径只有40cm的线束来说,其半径为20cm,因此,可认为8cm的偏差对于半径20cm的线束来说,其拟合效果足以满足实际工程中的应用。
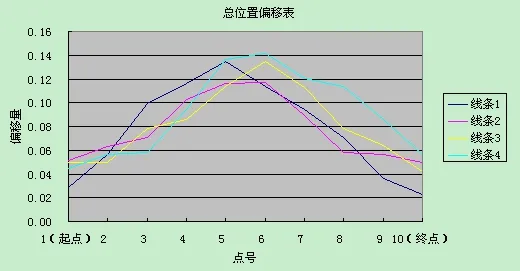
图6 电力线位置偏移分布图
4 结论
由于激光脉冲的发散性,其获取的电力线等线状物的点云并不是呈现一条线性状,而是以电力线为中心的一条带弧度的线柱状点云集。本文就是从这种思想出发,提出了基于获取的电力线点云数据自动提取电力线的方法。根据电力线点云求取出垂直于电力线走向的法截面上的点云面中心点位置作为节点,根据各节点拟合出电力线。该方法相比现有的基于电力线点云数据进行人工拟合电力线要更加方便快捷、准确,可用作计算电力线与线下植被距离测量的对象,另外还可作为数字电网中的模型等应用,为电力巡检带来一种新思路和新方法。此外,机载LiDAR技术除了用在数字电网巡线外,还可以用于输电线路选线、排位设计、电力安全巡线以及数字电网运营管理等方面,相比于传统人工测量和摄影测量,机载激光雷达技术不仅大大提高了工作效率,而且在测量产品的应用方面也具有独特优势,需要进一步利用LiDAR系统获取的可见光影像、近红外影像对输电线路下的地表物点云数据进行自动或半自动分类,单独对兴趣点云数据(一般指植被、树木等)与电力线间的距离进行量测,根据树木生长的特性预估出其生长的高度极限,从而对其进行有计划的砍伐,避免其树木生长过高导致与输电线路的碰触危险。
[1]张小红.机载激光雷达测量技术理论与方法[M].武汉:武汉大学出版社,2007.
[2]张小红.机载激光扫描数据滤波及地物提取[D].武汉: 武汉大学,2002.
[3]蔡喜平,赵远,黄建民,等.成像激光雷达系统性能的研究.光学技术,2001,27(1):60-62.
[4]李朝阳.高压线路走廊特征物提取和高程计算研究[D].北京:北京邮电大学,2006.
[5]黄朝华,鲍艳,黄斌.基于LIDAR技术的电力机载巡线测量系统[C].北京:测绘科技信息交流论文集,2007,4-5.
[6]朱宏波,殷金华.机载激光测量技术在高压输电线路工程中应用[J].电力勘测设计,2007(3):37-40.
[7]黄志明.21世纪中国输电线路发展前景展望[J].国际电力,2000,4(3):29-33.
[8]王平.输电线路应用直升飞机巡线维护试验研究[J].四川电力技术,2002,25(1):4-6.
[9]陈功,程正逢,石克勤,等.激光雷达在电力线路工程勘测设计中的应用[J].电力勘测设计,2006(5):53-57.
[10]殷金华,孙朝阳,郑彦春.机载激光测量技术在特高压输电线路工程中的应用研究[J].电力建设,2007,28(7): 9-13.
[11]Bin Jiang.Extraction of spatial lbjects from laser-scanning data using a clustering technique [C].XXth ISPRS Congress,Commission 3,Istanbul,Turkey: ISPRS,2004:219- 224.
[12]Sithole,G. and Vosselman. Experimental comparison of filtering algorithms for bare-earth extraction from airborne laser scanning point clouds[C].ISPRS Journal of Photogrammetry and Remote Sensing,2004,59(1-2):85-101.