风力发电系统运行控制技术研究
2013-08-22赵海军
赵海军
(中广核风电公司 内蒙古分公司响泉风电场,内蒙古 锡林郭勒盟026000)
0 引言
在提倡可持续发展的今天,风能的开发利用具有积极的战略意义。特别是在能源供求日趋紧张的情况下,风能作为一种替代能源的意义就更加突出。风力发电系统根据运行方式和控制技术的不同可以分为恒速恒频系统和变速恒频系统,其中变速恒频风力发电系统能够更高效地利用风能。
并网型变速恒频风力发电系统一般由风轮、齿轮箱(在直驱方式中已略去齿轮箱)、发电机和变流设备组成,如图1风力发电系统框国所示。风轮的作用是捕捉风能,并将之转化为机械能;发电机则将机械能转化为电能;变流设备将发电机发出的频率幅值随风速波动的交流电转化为与电网电压同频同幅的交流电,然后馈送至电网。
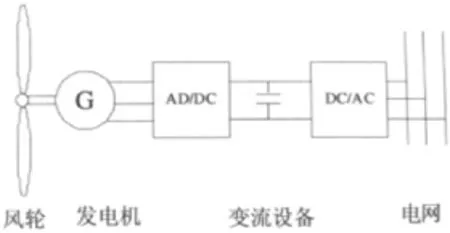
图1 风力发电系统框图
风力发电系统主要包括2种运行状态:
1)最大风能追踪状态。当风速低于额定风速时,风轮的转速会随着风速的波动而不断变化,以维持最佳叶尖速比及最大风能利用系数,从而有效提高风机的输出功率。
2)额定功率运行状态,当风速高于额定风速时,通过调节叶片桨距角和抑制风轮转速,降低风轮的风能捕获效率,保证风机运行在额定工作点附近。
可见,风力发电机组的运行控制在不同的运行状态有不同的控制策略:
1)最大功率点跟踪控制(MPPT控制):当实际风速低于额定风速时,对风力发电机组进行控制,保证机组运行在最大风能追踪状态下,最大限度地捕获风能。
2)恒功率控制:当实际风速高于额定风速时,受机械强度、发电机容量和变频器容量等限制,必须降低风轮捕获的能量,使功率保持在额定值附近。
实际的风电机组常通过电气功率调节和叶片技术2种手段实现上述控制目标。前者是通过调节发电机和变流设备的电气功率来改变风轮的转速,进而间接改变风轮转化风能的效率;后者主要利用叶片的空气动力学特性,如变桨距技术和失速状态,来直接改变风轮的捕风效率。
下面,本文将对MPPT控制策略和恒功率控制策略的原理及它们常用的实现方法进行研究和总结。
1 MPPT控制
1.1 MPPT控制的原理
根据贝兹理论,风轮从风能中吸收的功率可以表示为:

式中:P 为空气密度,kg/m3;R 为风轮的半径,m;v 为风速,m/s;Cp为风能利用系数,反映了风轮机利用风能的效率,它是叶尖速比λ和叶片桨距角β的函数。而叶尖速比为:

式中:ωr为风轮机械角速度,rad·s。
当风力发电系统运行于最大风能追踪状态时,桨距角固定。此时,Cp的值决定于λ。对于特定的风力机,其Cp-λ曲线是一定的。
可见,当λ为λopt时风力机达到最大风能利用系数Cpmax因而称λopt为最佳叶尖速比。由式(2)可知当λ为λopt时,不同的风速均对应一特定的最优转速ωropt。
其中,各曲线最优功率点对应的转速即为最优转速ωropt。连接各曲线的最优功率点即得风力机最优功率曲线。
MPPT控制的原理即,在不同风速下通过调节风力机转速使其始终运行于最优转速。以保证最佳叶尖速比,进而保证风力机运行于最优功率曲线上,最大限度地捕获风能。
1.2 MPPT控制的实现方法
MPPT控制一般采用电磁功率控制方式,目前最大风能跟踪主要有3种控制策略:叶尖速比控制、功率信号反馈法和爬山搜索法。
1.2.1 叶尖速比法
叶尖速比控制的目的是使风力机的叶尖速比λ始终保持在最佳值λopt上,在任何风速时就可获得最大风能转换效率。它不断测量风速和风力机转速,计算出实际叶尖速比,将其同最优叶尖速比相比较,将其误差送入控制器,控制器控制逆变器的输出来调节风机转速,从而保证叶尖速比最优。
该方案能有效根据风速变化及时调整发电机输出功率,控制方法简洁清晰,但是需要知 道风力机特性和测量风速,风速测量的不准确性导致系统可靠性降低。
1.2.2 功率信号反馈法
该方案不需要知道确切的风力机特性,也不需要相关的测风装置。当风带动风力机转动至发电机发电运行的转速范围内时,根据转速以及风力机特征参数计算出给定功率,并与发电机输出功率的观测值相比较得到误差量。经过PI调节器(PI调节器),就是对偏差乘以一个倍数P,再叠加这个偏差的积分I作用,利用这个量实施控制,调节器输出反馈参数,使系统趋于稳定)给出发电机可控参数值,调节发电机输出电流的大小,最终实现发电机输出功率的调节。
该方案是基于叶尖速比控制方案的修改提高方案,不同之处在于将输出功率与风速之间的关系转换成输出功率与发电机转速之间的关系,从而引转速反馈,可使系统工作在最佳功 率负载线附近,而且系统结构更简单、更可靠。
这种方法的缺点是:对于不同的风力机,最大功率曲线需要事先通过仿真或试验测得,这增加了率反馈控制难度和实际应用成本。
通过控制发电机输出功率来间接控制风力机的输入功率,以实现需检测风速的最大功率点跟踪。也有文献将功率信号反馈法与爬山法相结合设计了一种混合控制略,克服了功率信号反馈法的缺陷。
2 恒功率控制
2.1 恒功率控制的原理
由1.1节可知,Cp是叶尖速比λ和叶片桨距角β的函数典型Cp(λ,β)曲线。
可知:1)当λ为恒定值时,增大桨距角β则Cp减小(红色虚线所示);2)当λ为恒定值时,λ偏离最佳叶尖速比λopt时,Cp迅速减小。
恒功率控制的原理即,当风速高于额定风速时,通过调节叶尖速比λ或桨距角β(或同时调节λ和β)以减小Cp值,从而减少风力机捕获的风能,保证风力机处于额定功率运行状态。
2.2 恒功率控制的实现方法
额定风速上的恒功率控制的实现方法主要是叶片技术,应用较广泛的是定桨距失速控制和变桨距控制。
2.2.1 定桨距失速控制
该控制方式利用桨叶翼型本身的失速特性,在高于额定风速下,气流的功角增大到失速条件,使桨叶的表面产生紊流,风轮转速减小,导致叶尖速比减小,即降低风能利用效率,达到限制功率的目的。采用这种方式的风力发电系统控制调节简单可靠,但为了产生失速效应,导致叶片重,结构复杂,机组的整体效率较低,当风速达到一定值时必须停机。
2.2.2 变桨距控制
该控制方式通过调节风叶的桨距角,改变气流对叶片功角,从而改变风轮获得的空气动力转矩,使得当风速高于额定风速时风力发电机输出功率保持恒定。
风力发电系统是一个涵盖面广,控制对象复杂的非线性随机系统,因而其变桨距控制是一类非线性多变量控制问题。 变桨距控制策略有传统的PI控制及其改进控制策略,也有先进的智能控制,例如模糊控制、滑膜控制、非线性鲁棒控制和基于神经网络的控制等。
PID控制虽然结构简单,但是对于不同的风机需要进行大量的重复实验才能确定最优的PID控制参数,并且当风机运行偏离平衡点时,其控制性能严重降低甚至会导致系统不稳定。
许多学者将模糊控制法用于设计变桨距控制器,取得了较好的控制效果。此外,非线性 鲁棒控制、滑膜变结构、神经网络、变论域自适应模糊等先进控制策略也在变桨距控制中得到应用。
3 结论
风力发电是一个广泛的领域的研究前景,人们继续增加他们的重视程度,及其相关领域正在发生着日新月异的变化。风力发电系统的运行控制策略对系统效率,安全性和供电质量有直接关系。 MPPT控制,最优控制,基于智能控制的最大功率点跟踪控制策略将是未来的发展方向。通过经典的控制,以先进的智能控制,恒功率控制的控制处理的对象的局部线性化方法研制而成的线性控制,更好地整合系统的非线性特性,提高控制器和系统控制的鲁棒性的效果。
