模糊控制在温度控制系统中的仿真研究
2013-08-20王振
王 振
德州职业技术学院,山东德州 253034
0 引言
温度控制系统是以温度为被控参数的控制系统,它在工业中的各个领域都有广泛的应用。在工业生产过程中,有很多地方需要对控制对象进行温度控制,使温度高精度地保持在给定的数值,如冶炼、纺织、食品、化工、医药电子等场合均对温度提出了相当高的要求。
1 模糊控制器的设计
1.1 模糊控制的基本原理
模糊控制系统,它的核心部分为模糊控制器。通常模糊控制器包括4 个部分:1)模糊化接口;2)知识库;3)推理机;4)精确化。
1.2 模糊温度控制器的设计
1.2.1 模糊控制器输入输出变量的确定
假设温度的设定值为Td,系统的实际温度为T,则偏差e=Td-T,其变化率为偏差率de,把e 和de 作为系统的输入变量,模糊控制器的输出变量为晶闸管SCR 导通角u 的变化,SCR开度可以间接控制系统的温度。这样就可以构成一个二维的模糊控制器。
1.2.2 输入输出变量的语言描述
选取输人语言变量为温度误差e 和温度误差的变化率de,输出语言变量为控制量的变化u。本控制器设计中描述输入变量和输出变量的语言值都取七个模糊子集,即{NB(负大),NM(负中),NS(负小),ZE(零),PS(正小),PM(正中),PB(正大)}。其中各值论域为:
e 的基本论域为(-5 ℃,5 ℃);de 的基本论域为(-10,10);u 的基本论域为(-0.5,+0.5);
这里注意的是偏差的论域为(-5℃,5℃),当偏差大于5℃时按照5℃时的情况进行运算,小于-5℃时按照-5℃时的情况运算。
2 模糊控制在温度控制系统中的仿真
2.1 模糊控制器的仿真
锅炉是工业比较常见的设备,锅炉的水温可以通过晶闸管SCR 控制加热器加热提高,设计一个模糊控制器使水温能稳定在一个固定点(设定值)。
在这个系统中,被调整参数是水温,控制量是SCR 导通角。因为锅炉里水是流动的,故SCR 导通角适当小的时候水温可以下降。所以,理论是能实现水温稳定在某点。

图1 锅炉结构示意图
2.2 MATLAB 仿真
为了检测模糊控制器的控制效果,我们必须对其进行Simulink 仿真。如图3-2 模糊控制温度系统仿真框图。
采用模糊及常规PID 控制,通过辨识,得到系统传递函数

图2 模糊控制仿真框图
采用模糊控制器对温度系统进行控制,仿真运行的结果如图3 所示。常规控制器对温度系统进行控制的仿真结构为图4所示。
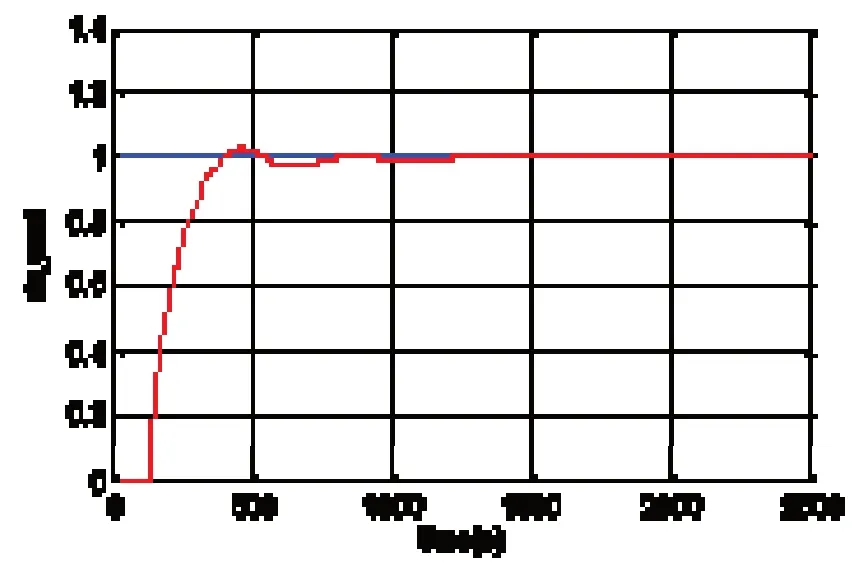
图3 模糊控制时系统响应曲线

图4 常规PID 控制时系统响应曲线
由上面的图可以看出,采用模糊控制比常规PID 具有更好的控制效果。
3 结论
模糊控制器克服了单纯的PID 控制器超调量大,过渡时间长的缺点;模糊控制器具有超调量小,过渡时间短,控制稳定时控制精度高,仅存在很小稳态偏差以及很小范围的振荡。
从目前模糊控制及其参数整定的研究和应用现状来看,以下方面是今后需进一步研究和实践的重点:
1)在模糊规则调整方面,在设计控制器时,应该总结出系统化设计方法,到目前为止还未有成熟的模糊规则可以借鉴。
2)智能控制器有待于进一步研究,将自适应、自整定和增益计划设定有机结合,使其具有自动诊断功能;结合专家经验知识、直觉推理逻辑等专家系统思想方法对原有PID 控制器设计思想及整定方法进行改进;以及从生产过程的实际出发,设计满足实际过程要求的控制方案,将预测控制、模糊控制、优化控制和PID 控制相结合,进一步提高控制系统的性能,是智能模糊控制发展极其有前途的方向。
[1]石辛民.模糊控制及其MATLAB仿真[M].清华大学出版社,2008:201-230.
[2]张立峰,金秀章,田沛.基于模糊自调整PID技术的励磁控制器研究[J].华北电力大学学报,2006,33(4):2022.
