慧鱼智能化立体旋转停车库的创新设计*
2013-08-18蒯苏苏陈寒松孙明权吴动波
蒯苏苏,陈寒松,孙明权,吴动波,张 闯,杨 君
(江苏大学,江苏 镇江 212013)
0 引言
智能机械是由执行机构、控制器、伺服驱动系统、检测传感装置及智能材料构成,是一种仿人操作、自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化设备,适合于多品种、变批量的柔性生产。以慧鱼创意组合模型为平台,以机械原理及设计、控制工程基础、微机原理及应用等为先修课程,在涉及机械学、计算机技术、传感器技术、人工智能等多学科理论的基础上,本文设计了一种智能化立体旋转停车库,并对复杂智能产品开发问题和控制运动特性矩阵的理论方法进行了深入研究。
1 建立产品功能模型
“智能立体旋转停车库”,创意来自于立体旋转式能充分地利用空间,每个车库可以在电机M1驱动“蜗轮蜗杆——齿轮传动”的二级传动下旋转,其二级传动的组合效率η=0.95×0.96=0.912,传动方案克服了带传动易打滑的缺点,在合理分配蜗轮蜗杆——齿轮传动比的基础上[1],车库可灵活地循环,自动伸缩,结构新颖,自动化程度好。
根据TRIZ理论中的“Stone的功能结构”,首先建立智能立体旋转停车库的总功能模型,如图1所示,然后完成各功能的解。

图1 智能车库功能结构
1.1 分功能1:停车场
设计车库底板(P板)的面积为定值,库门采用电磁阀控制气动门。图2是一电磁阀开关的工作原理图。该开关有两种状态:“打开”与“闭合”,气动门与车库用铰链连接,若操纵车库的气动门,使气缸处于进气,气动门开;或气缸处于排气、气动门关的状态。车库P板底面积与所允许通过的电流成正比。
图2 电磁阀开关控制气动门的工作原理图
原设计空车位所通过的额定电流为0.5 A,现希望再设计使存车库其额定电流增加到1 A,车库的体积保持不变。基于TRIZ中公理(AD)理论设计的冲突确定如下。
该车库原设计的功能与设计参数为:
FR1:电磁阀电机M4电流;DP1:车库P板的面积。此时,设计的约束为:C01:通过的电流0.5A;C02:P板的面积为定值。
由于P板面积与所允许通过的电流成正比,计算表明再设计中P板的面积加大才能满足增大电流的要求。但板的面积加大要使车库的体积加大,不满足约束。因此再设计约束出现冲突。故P板处需创新设计运动机构,一个创新的伸缩机构可解决该冲突。
创新的P板运动机构组成:在P板上叠加一个伸缩平板,伸缩平板下安装有定轴轮系和螺旋丝杠,P板上安装齿轮齿条机构、齿轮减速箱和电机M2(图3(a)),再在P板上安装有电子触点开关,改变电流控制电机M2的正反转,即可驱动定轴轮系带动螺旋丝杠传动并改变移动方向,同时也带动齿轮齿条机构啮合传动,实现控制伸缩平板中伸缩机构的平稳运动,如图3(b)所示。
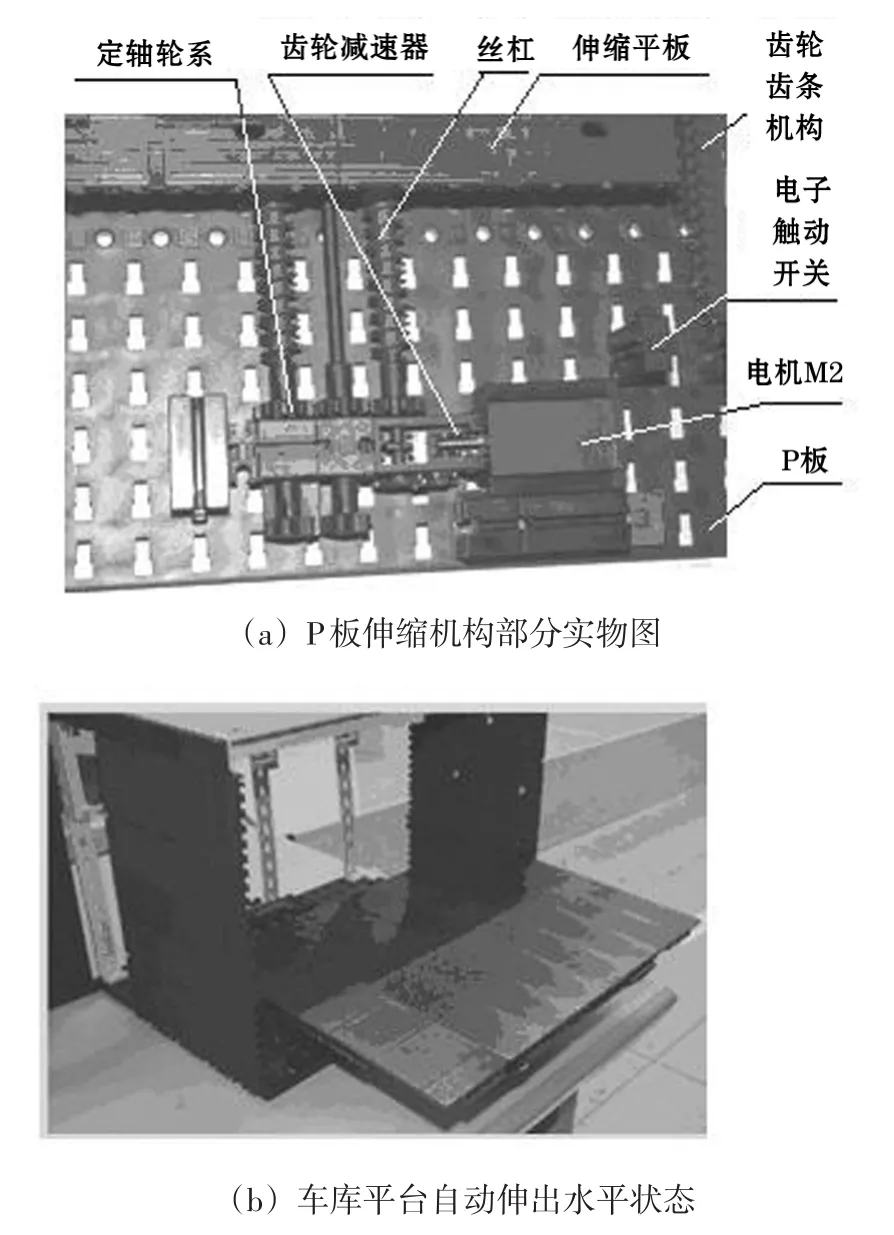
图3 车库平台伸缩机构的方案设计
该车库再设计的功能与设计参数为:
FR2:电机M2电流;DP2:P板伸缩机构。设计的矩阵式为非耦合设计[2],即:

公式(1)为对角线矩阵,设计控制解是完全解耦的,满足公理(AD)理论设计,
再设计的约束为:C11:通过的额定电流1 A;C12:车库的体积不变;当停车库气动门打开,伸缩板伸出,车库底面积增大,存车(或取车)后伸缩板缩进,气动门关闭,车库的体积保持不变。伸缩机构与气动门的逻辑关系见表1。

表1 伸缩机构与气动门的运动顺序
1.2 分功能2:车位与地面分离
使用“摩天轮”式转盘结构。转盘轴心处安装一个固定的中心轮,每60°安置一齿轮和链传动与中心轮啮合。在每个行星轮系的系杆上安装一个“停车库”停放1辆私家车,一个“摩天轮”可停放6辆车。电机M1驱动“蜗轮蜗杆——行星轮系”时,转盘转动,车库与地面分离。SolidWorks建模的旋转停车库见图4(a)。
由于汽车行走的是二维轨迹,用TRIZ中40个发明原理中的第15个原理“动态化”,概念设计时将智能车库的执行机构划分成具有相互关系的齿轮机构,形成动态车库解决车辆停放的空间化,采用行星轮系可实现将一维空间中静止的停车库变成在二维空间中运动或静止的停车库,在二维空间中的车位变成三维空间中的运动的车位。
该技术系统包含一个在重力作用下中心轮绕轴运动的物体,而且必须控制这个运动,问题可以通过给物体引入一种以控制的方式,在物体内运动的物质来移动物体的重心进行解决,需建立物-场模型。对照TRIZ中76个标准解,选用标准解法第2级:S2.1向合成物-场模型转化[3],S2.1.1链式物-场模型来解决问题。如图4(b)所示,其中F1为电能,S1为行星轮系,S2为车库;为保证车库在旋转时无相对滑动,添加物质S4,S4为链传动装置(并联在行星轮上),F2为机械能,S3为在旋转的过程中不至于出现倒置和摇晃的车库。
行星轮系及链传动复合传动装置[4],达到了将车库用多层排列代替单层排列的状态,如图4(c)所示。在图4(c)中,用三角固定杆固定中心齿轮,利用轮系中齿轮间的相互啮合,以无侧隙啮合保证车库在旋转的过程中时刻保持相对水平位置,当3号齿轮固定不动时,齿轮2和齿轮4保持相对位置做行星运动,齿轮1和齿轮5的旋转方向与齿轮3一致。由于齿轮3固定,所以齿轮1和齿轮5也相对静止。这样能保证车库在旋转的过程中始终水平。从而达到改善接触运动物体面积的根本目的。
1.3 分功能3:存车和取车
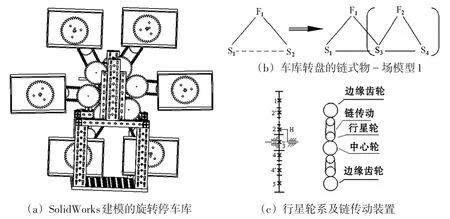
图4 立体旋转停车库结构设计
当一辆轿车进入停车场要求停车时,发散思维的工作流程为:信息输入→旋转臂旋转(行星轮系的系杆)→识别车位→伸缩板伸缩等步骤并进行模块化设计,过程控制采用循环软启动模式[5],工作流程如图5所示。
手按车主“所需车位按钮”触点开关[6],“摩天轮”根据相应的停车位信息指令要求,“旋转臂旋转”行星轮系传动,选定的“车主库号”车位到达接近地面距离最近时,电子触动开关呈“打开”状态,车库平台自动伸出,轿车开入停车库中的一个车位后,车库出入口装有感应开关,在检测到车辆存放进去且人员离开后,车库平台自动缩进,电子触动开关呈“闭合”状态,然后“摩天轮”旋转使之离开此位置,并将空车位的系杆旋转到达地面位置等待下一辆车的到来。当要求取出存放在车库里的轿车时,只需在控制端输入所存车库的对应编号使“摩天轮”旋转到地面位置由车主将车开出,整个过程完成。

图5 工作流程图
1.4 分功能4:清洁装置
图6是一种自动清洁装置,电机M3带动链条传动,用来传输动力到洗车板上;通过编程调用子程序控制清洗电机M3正反转,使得洗车连接器如毛刷来回运转,齿条和齿轮啮合使得洗车装置水平旋转,为车身清洁,由距离传感器感应距离发出输入信号至扩展板2的输入端,判断车辆的存在。
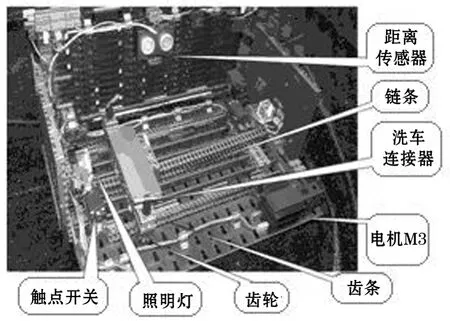
图6 自动清洁装置
2 智能化分选识别车位
智能化立体旋转停车库须完成一系列复杂动作:寻找车位——沿轨迹行走——遇到边界停止——回避边界——识别车位——清洁车身——继续沿轨迹行走等。其车库模式识别控制模型如图7所示。智能立体旋转停车库设计中,产品具有竞争力的关键是控制动态车位的运动轨迹。程序流程是根据使用者发出的指令或事先植入的程序来动作,是该机器的主功能[7-8]。主功能的实现就是关于车库在空间的点、线、面轨迹控制问题。多个触点开关信号(按钮)、距离传感器信号连接I/O扩展板1/扩展板2的输入端口,警示灯信号和红绿灯颜色信号连接I/O扩展板1/扩展板2的输出端口,与“ROBO控制器”耦合,USB串口输出信号至计算机COM1/2,编写相应ROBOPro图形化程序,进行模式识别,优化最小路径,定时控制车库到达指定位置,满足精度要求。

图7 智能化车库慧鱼模型控制
六个车位的1~6个触点开关信号L1、L2、L3、L4、L5、L6按数字量输入ROBO控制器的输入端口,识别车位控制部分主要使用了触点开关的限位作用,通过延时等待,判断数据并比较;距离传感器的感应发出反馈信号;而ROBO控制器接口板的输出端口分别连接M1~M4电机(执行器),这四路电机输出可以改变转速方向和进行8级调速。当操作与车库对应的触点开关按钮,电机M1驱动行星轮系,则车库所处的环境在每一个阶段由蜗轮蜗杆——行星轮系(M1驱动)、伸缩机构(M2驱动)、清洁装置(M3驱动)、气动门(M4驱动)等自动调整,ROBO控制器核心元件按软件指令传输信号实现识别和定时控制,主程序、子程序见图8,经过计算机编程控制后,实现机器主功能。
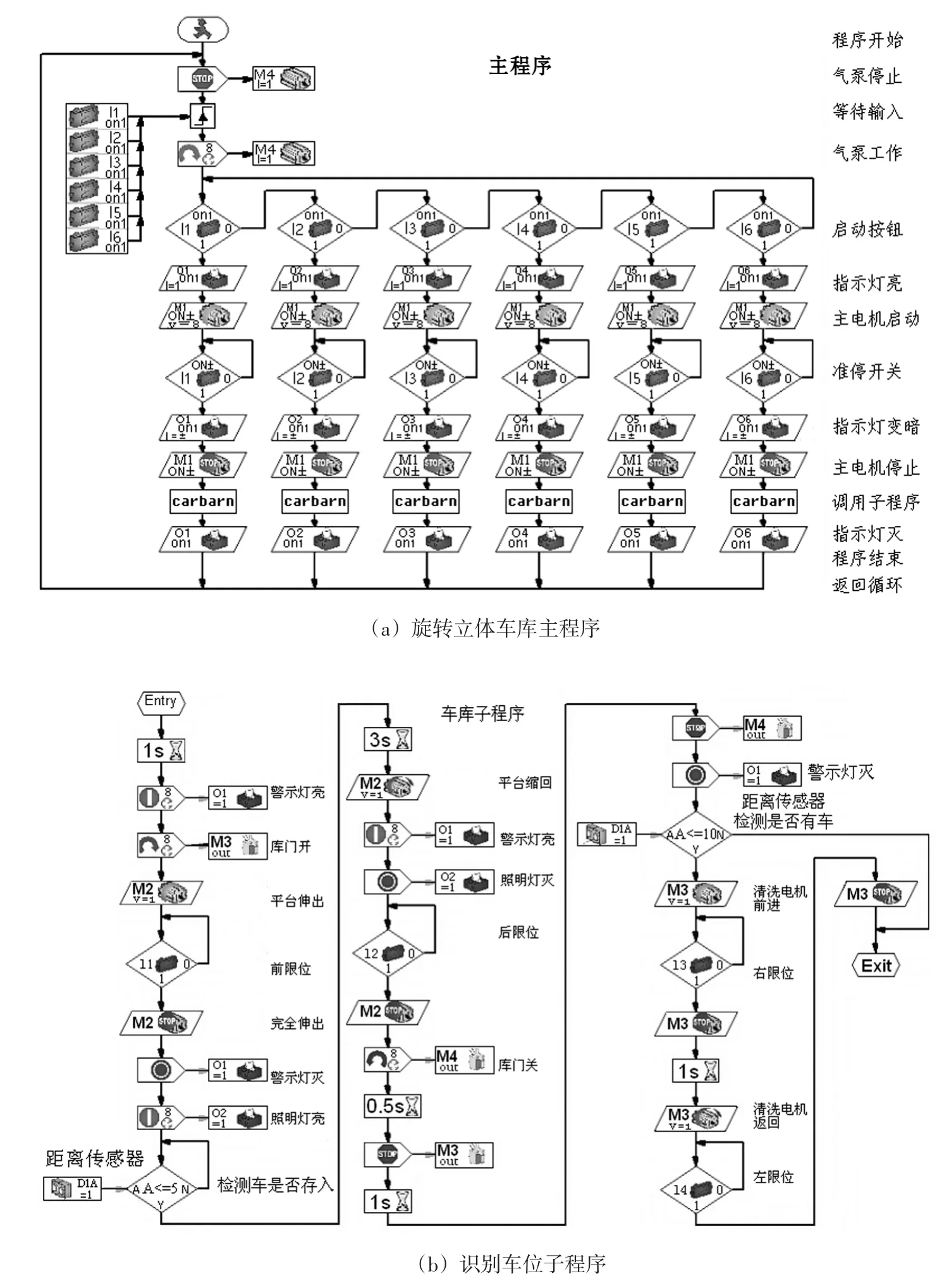
图8 智能车库硬件和软件ROBOPro程序
3 结论
(1)智能化立体旋转停车库,充分利用了创新智能,用ROBOPro图形化编程,控制车库完成寻找车库——沿轨迹行走——遇到边界停止——回避边界——识别车位——清洁车身——继续沿轨迹行走等功能。
(2)车库伸缩机构的伸缩平板下安装有定轴轮系、螺旋丝杠和电子触点开关,软件指令控制电磁阀开关和电机M2的正反转,设计控制解矩阵是完全解耦的,方便计算机集成控制,为实现识别车库位置和提高精度提供了保证。
(3)立体旋转停车库中行星轮系及链传动复合装置的无相对滑动和对称式结构设计,使得它在车辆比较多的时候仍然能够实现自身的静平衡状态。
[1]申永胜.机械原理教程[M].北京:清华大学出版社,2003.
[2]蒯苏苏,马履中.TRIZ理论机械创新设计工程训练教程[M].北京:北京大学出版社,2011.
[3]蒯苏苏.港口鹤式起重机的创新设计[J].机械传动 , 2012, 36 (5):56-70.
[4]濮良贵,纪名刚.机械设计:第八版[M].北京:高等教育出版社,2006.
[5]漆向军,刘武,刘明丹,等.基于慧鱼模型对焊接机器人无碰撞轨迹规划的研究[J].机械科学与技术 , 2007, 26 (11):1442-1446.
[6]曲凌.慧鱼创意机器人设计与实践教程[M].上海:上海交通大学出版社,2010.
[7]曹国忠,郭海霞,檀润华,等.面向功能创新的功能进化、组合与失效研究[J].机械工程学报,2012,48(11):29-38.
[8]杨清亮.发明是这样诞生的:TRIZ理论全接触[M].北京:机械工业出版社,2006.