改进LANDMARC最近邻居算法在嵌入式系统的实现
2013-08-17张玉茹谭丽萍张晓兰姜海涛苏晓东
张玉茹,谭丽萍,张晓兰,姜海涛,赵 明,李 云,苏晓东
(哈尔滨商业大学,计算机与信息工程学院,哈尔滨150028)
随着人性化计算研究的深入和发展,更多的应用需要知道目标的位置信息,基于位置的服务也越来越多地受到人们的关注.虽然GPS(Global Positioning System,全球定位系统)等定位技术在室外的应用已经非常成熟,但在室内环境中,由于电磁波屏蔽等因素,并不能满足用户的室内定位需求[1].而近些年来,基于无线网络、超声波以及RFID等技术的室内定位方法已经成为室内定位的主要研究方向.其中,RFID(Radio Frequency Identification,无线射频识别)技术是一种非接触式自动识别技术,利用射频信号通过空间耦合的方式实现信息的传递[2],并可以通过射频信号自动识别单个或多个目标,因此在室内定位中具有较为明显的优势.
随着计算机网络的发展,以及现场总线等技术的广泛使用,串口通讯在各种场合的应用越来越广泛.在某些集中控制场合,现场数据大都是通过串口实现通信[3].
ARM芯片是目前嵌入式系统中最主流的芯片之一,其外围接口芯片支持串口通讯,并且其上可以运行嵌入式操作系统Windows CE、LINUX等,因此ARM在控制领域得到了越来越多的应用.
1 改进的最近邻居算法
LANDMARC系统的最近邻居算法的可扩展性好,能适应较复杂的环境,是较实用的RFID室内定位算法.但在一些封闭环境中,该算法易受信号的多路径效应影响[4],从而导致其定位精度不高.改进的最近邻居算法在原算法中加入反馈校正值,可以得到更好的定位效果.
改进的最近邻居算法[5-6]的求解过程如下(假设有n个阅读器,m个参考标签和u个待定位标签):
1)定义待定位标签的信号强度矢量是S=(S1,S2,…Sn),其中表示待定位标签在阅读器 i上的值,i∈(1,n),对于参考标签,定义相应的信号强度矢量 θ =(θ1,θ2,…θn),其中 θ 表示参考标签在阅读器i上的值,因此,对于每个待定位标签p,p∈(1,u),得到与参考标签的欧几里得距离,如表达式(1)所示:

2)通过求得的E值,得到k个与待定位标签信号强度接近的参考标签,可以推算出待定位标签的坐标,如式(2)所示:
其中:(x,y)为待定位标签初始坐标,(xi,yi)分别为k个参考标签的坐标.wi表示的是第i个参考标签的权重,由公式(3)获得
3)得到待定位标签的初始坐标(x,y)后,根据第1)步所得的E值,选择具有最小择具有最小E值的参考标签为关键参考标签,记为Tkey,针对Tkey使用k-最近邻算法,先得到与它具有最小E值的k-1个参考标签坐标,同时加入刚计算所得到待定位标签初始位置坐标,从而得到距离Tkey最近的K个标签的坐标,最终得到Tkey的估计坐标,对比Tkey的真实位置和估计位置,得到坐标反馈校正值(Δx,Δy);
4)将反馈校正值(Δx,Δy)加入到刚才所得的参考标签初始坐标(x0,y0),得到校正后的待定标签最终的估计坐标(x',y');
5)通过比较待定位标签的实际坐标和理论所得坐标的比较,可以计算出它们之间的误差值,如式④所示:

其中:(x,y)表示待定位标签的真实坐标,(x',y')表示待定位标签的估计坐标.
2 改进算法实现
2.1 改进算法在WINCE系统下的实现
WINCE系统是可以加载到ARM处理器上的一种嵌入式操作系统.在WINCE系统下,可以处理由ARM处理器串口设备接收到的外部数据.
在LANDMARC系统中,RFID读卡器将接收到的参考标签和待定位标签的UID号和它们各自对应的信号强度,通过串口发送到ARM处理器的串口端.在WINCE系统下,通过读取ARM处理器串口的数据,将数据进行解析,并通过改进的最近邻居算法处理,最终得到待定位标签的UID号及其位置坐标.
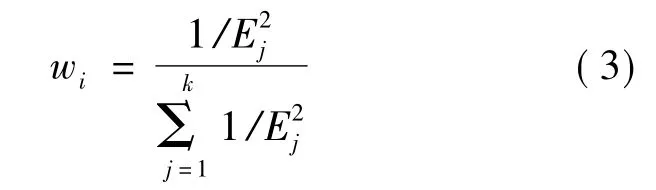
改进算法是用VS2005开发应用程序的形式实现的.首先,基于对话框类建立一个OpenPort()函数通过CreateFile()打开串口,SetCommState()配置串口,如图1所示.
在打开并配置好串口后,函数CommRecvTread(LPVOID lparam)通过ReadFile(pDlg->m_hComm,recvBuf,1024,&dwLength,NULL)接收串口数据并将数据放入recvBuf缓冲区,在成功接收数据后调用回调函数OnCommRecv(CWnd*pWnd,char*buf,int buflen)将接收到的串口数据通过PostMessage(WM_RECV_SERIAL_DATA,WPARAM(pRecvBuf),buflen)发送给与 WM_RECV_SERIAL_DATA消息关联的串口接收数据处理函 数 OnRecvSerialData(WPARAM wParam,LPARAM lParam),在该函数中对接收到的数据进行解析,提取待定位标签的UID号及其信号强度,并用C语言编程实现改进的定位算法,最终处理结果如图2所示.
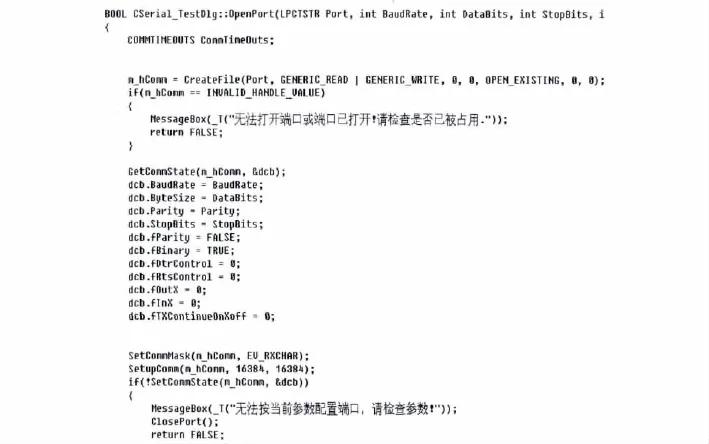
图1 WINCE下串口配置程序
图2 WINCE下算法处理结果
2.2 改进算法在LINUX系统下的实现
嵌入式LINUX系统也是一种可以加载到ARM处理器上的嵌入式操作系统,因其源码开放,故日益成为主流的嵌入式操作系统之一.
在加载LINUX操作系统的ARM处理器上,LINUX系统不仅可以读取ARM处理器串口中的数据,同时可以对串口中的数据进行解析处理,因此改进的最近邻居算法也是可以在LINUX操作系统下实现的.
在LINUX系统下,设备的操作如同普通文件的操作一样,所以打开ARM处理器的串口设备可以使用open()函数,该函数的返回值为-1时,说明打开串口设备失败.在打开串口设备后,需要对串口进行配置,以使其能够正确接收到外部数据,对串口的配置包括保存原先串口配置、设置波特率、字符大小、奇偶校验位、停止位、本地连接和接收使能、设置最少字符和等待时间、清空串口缓冲以及激活最新配置使最新的串口配置生效等,当外部有数据发送到ARM处理器的串口设备时,LINUX操作系统需要执行读串口操作来获得串口数据.和读普通文件一样,使用read()函数即可,该函数将读取到的串口数据放入缓冲区buff中,如图3所示.
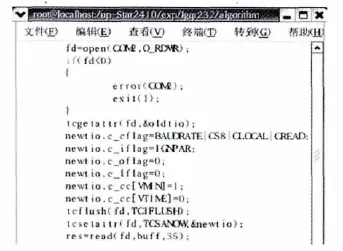
图3 LINUX下串口配置程序
接下来对接收缓冲区的数据进行解析,解析出改进后算法所需的数据,包括UID号和待定位标签的信号强度值,将解析数据所得的有用的数据应用到算法程序中,通过C语言编程改进后算法,最终得到待定位标签的位置坐标以及待定标签的UID号.
在编写完打开串口、配置串口、读取串口、解析串口数据、改进算法程序后,在LINUX系统中还需要编写MAKEFILE文件,如图4所示.使得上述编写的程序可以通过arm-linux-gcc编译成可执行程序,运行在ARM处理设备中.
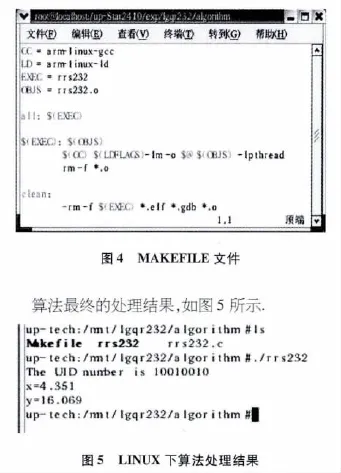
图5中,x值为标签所在位置的横坐标值,y值为标签所在位置的纵坐标值,与WINCE系统下算法处理结果是一样的.
3 结语
本文在介绍改进后最近邻居算法的基础上,给出改进后算法在嵌入式操作系统WINCE及LINUX中实现的步骤,包括了WINCE操作系统下对串口设备的配置、读操作以及回调函数、数据处理函数以及算法处理的编写,操作系统下对串口设备的配置、读操作、数据算法处理以及MAKEFILE文件的编写.最终开发了可在 WINCE系统和LINUX系统下执行的算法应用程序.从而给改进后算法被应用于基于ARM的RFID室内定位系统提供了依据.
[1] 李魏峰.基于RFID的室内定位技术研究[D].上海:上海交通大学,2010.
[2] 朱凤娟.射频识别(RFID)技术的室内定位算法研究[D].广州:华南理工大学,2010.
[3] 王海洋,陈美君.基于ARM9的串口扩展的设计[J].计算机与现代化,2008(12):84-87.
[4] KYUWON H,SUNG H C.Advanced LANDMARC with adaptive k-nearest algorithm for RFID location system[C]//Wireless and Optical Communications Conference(WOCC) ,[S.l.]:[s.n.]2010(19):1 -5.
[5] ZHANG Y R,TAN L P,JIANG H T.The Simulation and Improved K-nearest Neighbors Algorithm of LANDMARC for Books Positioning[C]//2012 International Conference on Measurement,Information and Control(MIC),[S.l.]:[s.n.],2012(5):410-414.
[6] 张玉茹,陈德龙,李彬彬.动态帧时隙算法的研究与改进[J].哈尔滨商业大学学报:自然科学版,2011,27(6):834-836.
