基于Matlab的网络控制系统模糊控制算法应用研究
2013-08-16赵炜
赵炜
(北京工商大学,北京 100048)
网络控制系统 NCS(Networked Control System)是一种完全网络化、分布化的控制系统,是通过网络构成闭环的反馈控制系统。具体来说,网络控制系统以网络作为传输介质,实现传感器、控制器和执行器等系统各部件之间的信息交换,从而实现资源共享、远程监测与控制。
网络控制系统一般由三部分组成:控制器、被控对象以及通信网络。被控对象一般为连续系统,而控制器通常采用离散系统。被控对象的输出通道传感器采样的方式离散化,并通过通信网络发送到控制器的输入端。控制器进行运算后,将输出通过网络发送到被控对象的输入端,并由零阶保持器生成分段连续函数作为连续系统的输入。
利用由瑞典Lund工学院的Dan Henriksson和Anton Cervin等学者开发的、一种基于Matlab的、实时控制与网络控制仿真工具箱TrueTime[1],能够同时支持控制与实时调度,可以对网络时延、网络参数的系统性能的影响、控制方法和网络调度等多方面进行综合仿真研究,推进网络控制算法改进。
1 网络控制系统建模
与传统控制系统相比,网络控制系统会更多地受到网络环境的影响,如网络延迟、数据丢包、错序及单包与多包传输等,这些都将直接影响闭环系统的性能。对于一个被控对象,当采用不同类型网络环境时,所导致的网络控制系统的数学模型描述也将有所不同。在闭环系统中引入网络后,被控对象有了扩展,包含了直接控制对象及通信网络的广义被控对象。
网络控制系统仿真是将传统控制模型与网络结合的过程,其所依据的基本控制模型是常见的闭环控制系统,由控制器(比较环节、放大装置、校正装置)、执行机构、传感检测环节、被控对象等组成,接入网络后各器件通过网络相连接,其系统结构如图1所示。

图1 网络控制系统结构图
使用TrueTime进行仿真时,控制器节点、执行器节点等均通过网络模块相连接,而不再采用传统连接模式,在TrueTime环境下建立的系统仿真平台如图2所示[2]。

图2 网络控制系统仿真结构图
其中,节点1为干扰节点,节点2为执行器节点,节点3为传感器节点,节点4为控制器节点。其中,传感器节点周期地进行采样,采样值通过网络发送给控制器节点;控制器节点接收到采样数据后,立即进行控制计算,并将计算得到的控制信号通过网络发送给执行器节点。
网络控制系统中的传感器、控制器和执行器节点由实时内核模块实现,该模块最重要的参数就是初始化文件的名称。在初始化中需要完成以下工作:
(1)初始化功能模块内核,设置功能模块输入、输出端口的数目和调度的策略。
(2)定义任务函数,并根据节点采用的驱动方式设置不同的任务调度策略。
(3)初始化网络端口,设置节点对应的网络端口代号。
2 模糊控制在网络控制中的应用
在刘喜梅[3]等人的论文中曾证明,传统PID控制可以用于网络控制中,但考虑实际仿真过程中,时延网络控制系统的补偿手段主要采用传统的控制理论,且假定的理想化条件较多,如假设单包传送、通信无误等,因此应用于实际的控制网络时,控制效果难以预期。本文将模糊逻辑补偿算法引入传统PID控制器的设计中,以消除闭环网络控制系统中由时延引起的控制性能下降、系统不稳定等不利影响。在模糊PID时延补偿算法中,无需更改传统PID控制器的设计,以模糊补偿器调制PID控制器的输出,实现模糊逻辑条件参数与结论参数的整定。模糊调制器充分利用了模糊控制理论规则少、应用简单灵活的特点,在保持系统稳定性的同时,有效削弱了控制系统中由不确定性时延造成的脉动与振荡。在改善远程网络控制系统的动、静态性能方面表现出了较传统PID控制更强的功能特性。
仿真中的控制方法采用自适应模糊PID控制,自适应模糊PID控制器以误差e和误差变化率ec作为输入(利用模糊控制规则在线对PID参数进行修改),以满足不同时刻的e和ec对PID参数自整定的要求。自适应模糊PID控制器结构如图3所示[4]。

图3 模糊PID控制器结构
模糊控制设计的核心是总结工程设计人员的技术知识和实际操作经验,建立合适的模糊规则表。模糊控制器采用二维Mamdani控制器,模糊控制采用极大极小方法,解模糊方法采用重心法。比例增益KP、积分增益KI和微分增益KD的模糊控制规则表建立好后,可根据如下方法进行 KP、KI和 KD自适应校正。
将系统误差e和误差变化率ec变化范围定义为模糊集上的论域。 其模糊子集为 e,ec={NB,NM,NS,O,PS,PM,PB},子集中元素分别代表负大、负中、负小、零、正小、正中、正大。 设e、ec和 KP、KI、KD均服从正态分布,因此可得出各模糊子集的隶属度,根据各模糊子集的隶属度赋值表和各参数模糊控制模型,应用模糊合成推理设计PID参数的模糊矩阵表,查出修正参数代入下式计算:


3 仿真实验及其结果
在网络控制系统中假定:
(1)传感器为时钟驱动,即系统部件按照事先规定的时间间隔对控制对象进行采样。
(2)控制器和执行器为事件驱动,即系统部件在特定的事件发生时,部件才开始处理相应的任务。
(3)控制系统通信网络选择 CAN网络,不考虑数据包时序错乱问题 (假定在网络中存在数据包的时序错乱,网络可自行解决该问题)。
(4)调度采用 prioFP(固定优先级)策略,数据速率为1 000 000 b/s,网络节点数为4个。
(5)基于对网络的分析和建模抽象出网络时延模型。控制系统的采样周期设置为0.01 s,传感器到控制器的预计时延为0.002 s,控制计算时间预计为0.001 s,控制器到执行器的预计时延为0.002 s,这样,系统闭环预计时延为0.005 s。
(6)在实际网络控制系统的真实情况下,测量网络丢包率,系统丢包率参照实际网络传输情况设置为固定值3%。
网络系统参数如上设置完成后,为使得PID控制算法与模糊PID算法的对比更为清晰,被控对象选择四阶系统模型进行仿真,设定初始比例增益KP=150,初始积分增益KI=87,初始微分增益KD=17,对控制器节点设定不同任务代码,启动仿真即可分别得到常规PID控制与模糊PID控制下的阶跃响应仿真曲线。由于系统被控对象阶次高,调节时间长,为获得更加明显的对比效果,截取第一秒的图像如图4所示。
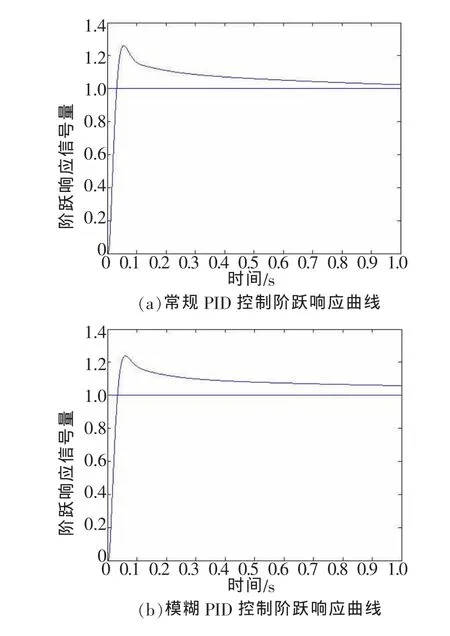

图4 常规PID控制与模糊PID控制阶跃响应仿真曲线
基于阶跃响应仿真曲线可以看出,在常规PID的控制作用下,系统阶跃响应超调量约为127%;在模糊PID的控制作用下,系统阶跃响应超调量约为123%。模糊PID控制下的系统超调量相比较常规PID控制得到明显改善,同时,模糊PID控制作用下调节时间等控制参数方面也略有提升,可见模糊PID控制算法适应于网络控制系统,对于实际网络系统的控制性能改善具有重要意义。
[1]HENRIKSSON D,CERVIN A.Truetime1.5-reference manual[R].Departmentof Automatic Control, Lund University, Sweden,2007.
[2]何坚强,张焕春.基于Matlab环境的网络控制系统仿真平台[J].计算机工程与应用,2005,2(1):142-145.
[3]刘喜梅,魏婉韵,于洁.基于 TrueTime的网络控制系统实时仿真[J].微计算机信息,2007,23(12):209-210.
[4]袁凤莲.Fuzzy自整定PID控制器设计及其Matlab仿真[J].沈阳航空工业学院学报,2006,23(1):71-75.
[5]黄赞,陈伟文.模糊自整定PID控制器设计及其Matlab仿真[J].控制与检测,2006(2):50-54.