煤矿井下架空索道存在缺陷及安全保护新技术
2013-08-16张庆军王学军
张庆军 王学军
(1.肥城白庄煤矿有限公司,山东 肥城271623;2.山东煤矿安全监察局 鲁中监察分局,山东 济南250031)
1 煤矿井下架空索道简介
地下矿用架空索道属于无极绳运输系统,其基本工作原理为驱动装置的电动机带动减速器与其直联的驱动轮转动,并依靠驱动轮(带衬垫)和牵引索之间的摩擦带动牵引索和吊椅,在线路上不停地循环运行,完成运送人员的任务。整个索道主要由机头驱动装置、托绳轮、四轮托(压)绳轮组、吊椅组件、同向捻钢丝绳(运载索)、机尾组件、机尾张紧装置、电控系统等组成,其基本结构如图1 所示。
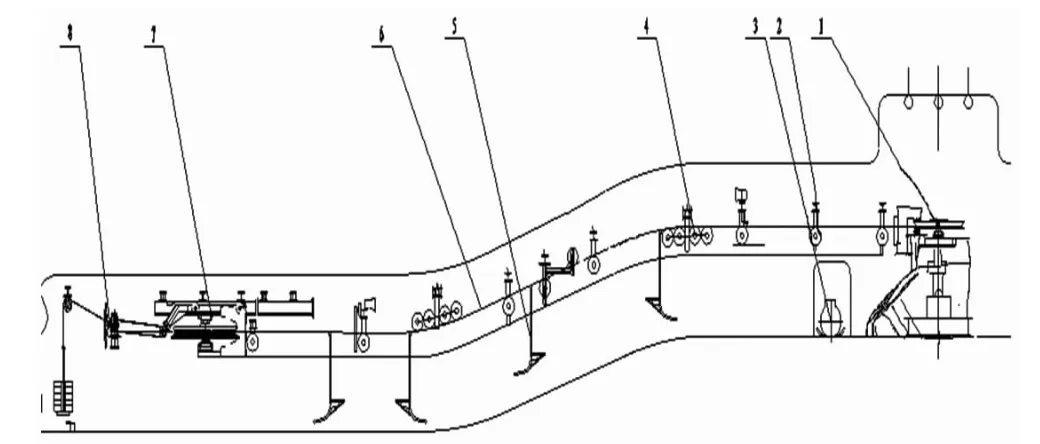
图1 地下矿用架空索道结构
2 架空索道安全保护存在缺陷
由于各生产厂家设计制造能力参差不齐,各矿井在用设备很多不能满足国家规范的要求,主要存在以下几个方面的问题:首先,与速度相关的保护功能不全,过速、欠速保护、反转保护信号选取不稳定或制动不灵活;其次,沿途无急停装置,设备运行过程中发生紧急情况,途中很难紧急制动;再次,驱动装置仅有工作制动器无安全制动器。由于上述问题的存在以及井下使用环境的影响,地下矿用架空索道运行故障和伤人事件时有发生。
3 安全保护装置的优化设计
3.1 安装旋转轴编码器,增加与速度相关的保护功能
在电机轴、驱动轮和压绳轮上分别安装旋转轴编码器,如图2 所示。电控系统采集旋转轴编码器脉冲信号。正常运行时,各部位的速度短时间内变化范围不大,一般规定速度在5 秒之内允许变动10%-15%(变动范围和时间限定可根据现场实际情况调整),在此范围内,各部位出现的速度波动可认为是正常扰动,保护装置不动作。当任一部位的速度波动超出允许变动范围和限定时间,则可判定发生事故或出现不正常运行情况,电控系统保护动作断电,制动闸抱闸,迅速停车制动。

图2 旋转轴编码器在电动机、压绳轮及驱动轮上的安装
3.2 沿途安设急停装置
紧急停车装置由主机柜和多个急停开关组成,主机柜放置在井下索道控制柜旁边,能够显示各个急停开关的动作情况。急停开关沿人行下山分段布置,安装于巷道一侧。主机柜和各急停开关装有通话装置,以便了解沿线情况。
井下索道沿途分段安设紧急停车装置,可在发生意外和紧急情况下,就地按动急停开关,停车信号送至主机柜,主机柜控制井下索道断电,制动闸抱闸,停车制动,急停开关按下后无法自动弹回,需人工旋转使其复位,方可开车。
3.3 增加井下索道制动装置
现阶段,该种设备普遍只有一道液压制动装置,安装在电机和减速箱之间的联轴器上。此时,若减速箱与驱动轮的连接轴发生断轴事故后,就无法对整个井下索道实施安全可靠的制动。因此,在对电控系统改造的同时在驱动轮上安装一副制动闸瓦,它的动作和原有的电力液压制动装置一致,当启动井下索道时,两副闸同时松开,经过延时后主电机起动,井下索道进入运行。当按下停止按钮或保护动作后,主电机电源切断,两副闸同时抱闸,制动迅速。
3.4 研制楔形捕绳器
利用罐笼防坠器滑楔捕绳制动原理,在架空乘人装置上车场,靠近驱动轮侧,安装自主研制的楔形捕绳器,与驱动轮液压制动闸联动;在出现驱动轮已制动,钢丝绳克服与驱动轮轮衬之间的摩擦力继续下滑时,有效将钢丝绳抱住,实现滑绳保护。
3.5 采用红外人员感应器,实现无人值守功能
通过红外感应人员的上、下车情况,自动实现慢速运行和高速运行相互转换。
(1)当井下索道正常运行时,通过红外人员感应器感应到人员上车后给电控系统发出一个上升触发信号,使系统输出一个高速控制信号,中间继电器断电使其常闭点闭合,从而使变位电阻1R 接通输出高速频率进而使电机在高速状态运行。
(2)当无人乘车时,计时器定时12min 后给电控系统一个下降触发信号,使系统输出低速控制信号,中间继电器吸合使其常开点闭合,使变位电阻2R 接通从而输出低速频率进而使电机在低速状态运行。
4 新型设计应用效果
4.1 新型设计应用后安全保护系统的技术优势
4.1.1 速度检测和控制技术
利用旋转轴编码器,以电机轴速为基准,采集电机轴、驱动轮和压绳轮运行的脉冲信号送入PLC,通过程序处理,变成归整的速度值,时刻监测三个部位的速度,判断井下索道运行状况.一旦出现异常,PLC切断电动机电源,驱动轮液压制动闸和安装在电机与减速箱之间的联轴器上液压闸动作,从而实现断轴保护;滑绳保护;过速、欠速保护;反转保护。
4.1.2 楔形捕绳器
楔形捕绳器,与驱动轮液压制动闸联动;当按下停止按钮或保护动作后,主电机电源切断,制动闸和安全闸同时抱闸;在出现驱动轮已制动,由于单侧承载超限或驱动轮衬块与钢丝绳之间的摩擦系数较小,钢丝绳克服与驱动轮轮衬之间的摩擦力继续下滑时,延时动作,有效将钢丝绳抱住,实现滑绳保护。
4.1.3 KTC101 控制系统
嵌入式系统、可靠的现场CAN 总线技术,加上丰富的系统接口,构成了KTC101 系统。KTC101 系统是具集控、检测、保护、通话、语言报警于一体的控制系统。系统采用了先进的工业嵌入式计算机(PC340)控制和现场CAN 总线技术,完成集中+分布式控制,两条控制沿线4+4 公里内不需要中继;主控采用10.4吋液晶显示屏,以彩色图形、动画、汉字的形式给出设备各种状态,无论是参数设定还是故障位置均以汉字显示;除电源箱外,系统其他所有部件均为安全型设备,从而使系统的密封至少达到了IP54 标准,接插件达到了IP67。其操作简单、维护方便,具有抗干扰、高兼容性、隔爆等特点。
4.2 取得的经济效益
4.2.1 直接经济效益
该技术在三家煤矿应用时,缩短职工到达现场时间,年延长原煤生产时间分别为3.5 天、4 天、3 天; 节约电费分别为8 万元、5 万元、5万元;年节约检修费分别为:7.5 万元、13 万元、7 万元。
4.2.2 间接经济效益
国内煤炭企业众多,随着当代采矿技术的不断发展,对井下索道的要求也不断提高,除了能够适应矿井的巷道布局形式和具有机械运人的基本功能以外,还要具有高安全性、高可靠性。项目的改造和成功运行,将对矿井高效、安全运送人员上起到巨大的推动作用,对降低工人的劳动强度,改善工作环境,具有非常重要的现实意义。
5 结语
优化设计后,系统防掉绳保护,松绳保护能力大幅提高,具有了拉线急停功能、滑绳保护;整个系统运行更加平稳,减小了系统冲击及噪音,使得乘坐人员更加安全舒适;同时,在系统实现无人值守后,系统自动化程度提高,操作更加简便。
[1]宋梁亮,葛笑寒.猴车系统使用与改造[J].轻工科技,2012,166(9):72-73.
[2]姜汉军.矿井辅助运输设备[M].徐州:中国矿业大学出版.