基于PC/104的航迹自动舵研究与设计
2013-08-11张韶华尹国龙陈皆潞
潘 进 张韶华 尹国龙 陈皆潞
(上海航海仪器有限责任公司 上海200136)
0 引 言
海上航行时,由于风、浪、流以及船体本身的影响,船舶不可避免地会偏离计划航线。这样就需要驾驶人员对船舶位置及航向不断进行调整,使船舶尽可能地在计划航线上航行。为了使船舶驾驶人员能够从这种繁复劳动中解脱出来,使用航迹自动舵,实现船舶航迹的精确保持成为人们最迫切的愿望。但是,我国船舶自动舵的研制、生产长期以来都是基于PID控制的机电产品[1],自适应或者智能航向舵及航迹舵还未形成定型成品[2]。虽然国内外众多学者对自动操舵仪的控制策略进行了研究[3-4],但真正形成产品的很少。本文在上海航海仪器有限责任公司现有的航向数字自动操舵仪的基础上进行研究,已经形成一套航迹自动操舵仪的原理样机。
1 航迹自动舵系统原理
航迹自动舵由三个闭环回路构成:航迹控制回路、航向控制回路和舵角控制回路。航迹控制回路将GPS接收的船舶实际位置信息(经度和纬度)与电子海图发出的计划航线相比较,得到航迹偏差,通过航迹控制算法得到指令航向给航向控制回路;航向控制回路将罗经采集的实际航向与指令航向相比较,根据航向控制算法得到指令舵角给舵角控制回路;舵角控制回路将舵角反馈装置发回的实际舵角值与指令舵角相比较,驱动舵机使舵角反馈值与指令舵角相一致,从而实现船舶的航迹控制,如图1所示。
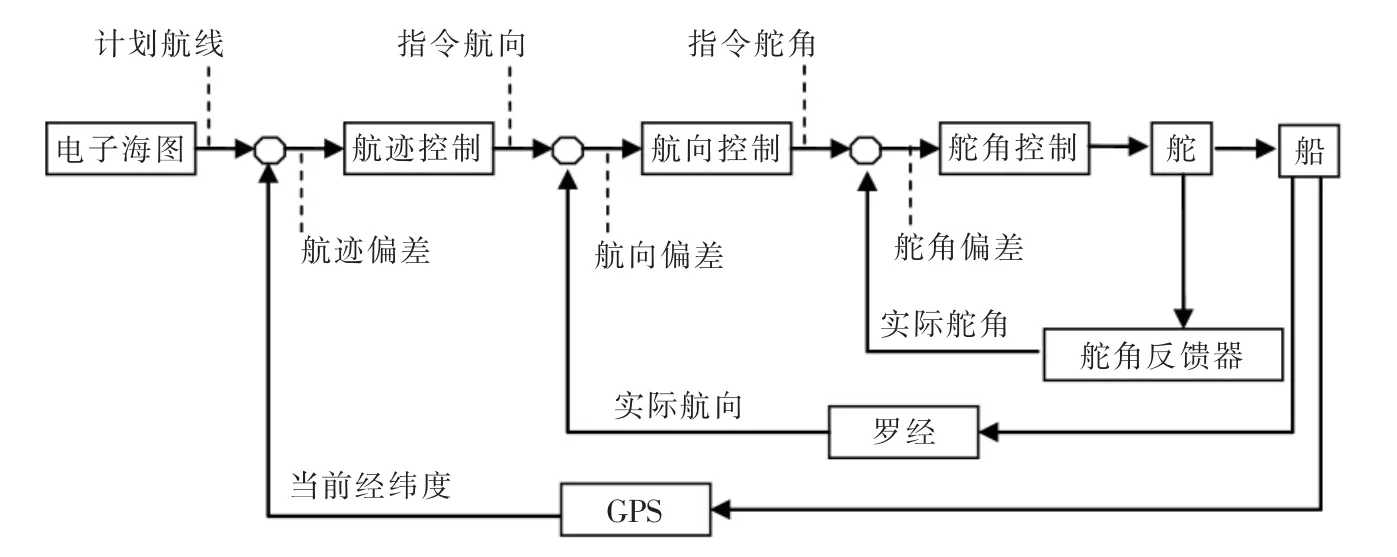
图1 航迹控制原理框图
从图1中可以发现,航迹控制逻辑清晰,各控制回路功能明确且可以分解。如果没有航迹控制回路,可以使用航向控制,则成为航向自动舵;如果同时没有航迹和航向控制回路,即仅仅使用舵角反馈控制,则成为随动自动舵。这样的系统结构便于系统的维护与升级,符合驾驶人员的逻辑思维,尤其有利于船舶驾驶安全。当高级别的操舵功能出现故障的时候,低级别的功能却依然可以正常使用。
2 硬件结构及实现
传统自动操舵仪设计采用大量模拟装置和机电设备,结构复杂,线缆繁多[5]。一般来说,操舵仪安装在驾驶室,而控制部分却安装在舵机舱,两者之间距离较远,如果能够减少之间的线缆连接,不仅可以大大降低成本,而且可以提高整个铺线的效率。
本套航迹控制自动舵全数字模式,采用研祥公司生产的低功耗嵌入式PC/104工业计算机为核心,以单片机作为外围支持,组成多CPU系统,并且采用双机热备份,提高系统的可靠性。同时,由于数字化的数据传递,大大减少了信号线缆的需求。
PC/104工业计算机负责复杂算法、数据接收以及协调各模块之间的工作,单片机负责各种数据采集与发送,从而实现模块化的设计,方便安装和维护。采用液晶显示屏显示数据及工作状态,采用DOS操作系统,软件主要以C语言为主进行编程,能够实现航迹、航向、随动、远程应急和本地应急操舵功能,以及系统报警、舵机报警等报警功能,同时还具有参数设置、调光等多种功能。其硬件功能及结构如图2所示。
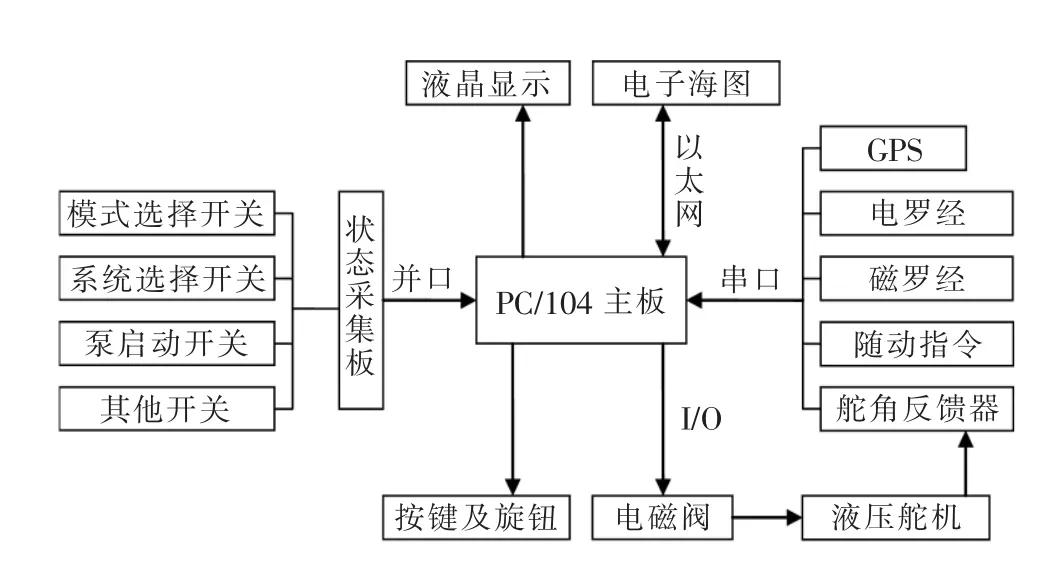
图2 航迹自动舵硬件组成框图
3 软件设计与实现
软件设计采用自上而下的模块化设计方法,根据软件需求报告制定软件详细设计,细化为显示模块、中断处理模块、通信模块、定时模块、按键处理模块、报警模块、数据采集以及处理模块等。
3.1 航迹控制
航迹航行控制示意图如图3所示。
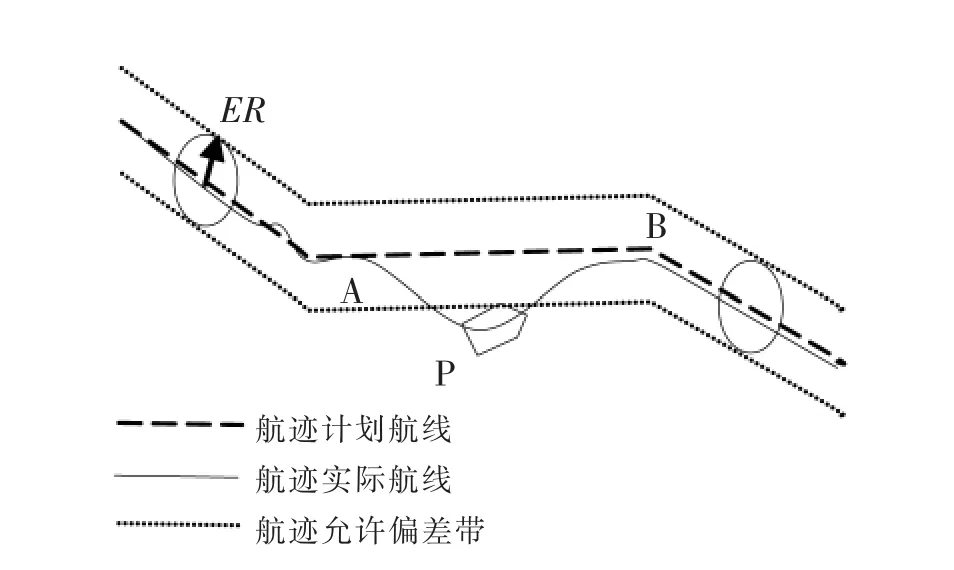
图3 航迹航行控制示意图
图3中A、B两点为计划航线上的任意两个相邻的转向点,分别以此两点为圆心,以ER为半径画圆,将两圆连接成图中虚线所示形状,于是在计划航线两侧各形成一个宽度为ER的带状区域,此区域可称为航迹允许偏差带。对于不同的航迹保持精度,船舶可以通过调整偏差带ER来实现。
如果船舶航行在偏差带内,可以认为船舶的实际航行精度已满足了计划航行精度的要求。一旦发现船舶越出偏差带(如图3中的P点),便立即采用航迹控制方式,依靠对船舶实施航向控制来使船舶迅速返回计划航线。
航迹控制器的功能主要是根据船舶航迹偏差的大小重新计算船舶指令航向传递给航向控制器,而航向控制器的作用就是使船舶艏向保持稳定,达到消除航迹偏差的目的。
根据上述原理可知:航迹控制系统中的输入参数是航迹偏差ER,而输出参数为指令航向角,指令航向角使船舶舶向偏向航迹一边,使航迹偏差逐渐减小。
航迹功能的使用必须通过以太网与电子海图相连接,及时接收电子海图发送过来的航线计划,同时通过串口接收GPS数据信息,以便实现航迹功能。
3.2 航向控制
航向功能中的实际航向信息来自于电罗经或者磁罗经。指令航向信息采用键盘和旋钮来调节。使用键盘设定到航向指令设定状态,采用航向专用旋钮来设定大小,初始值为当前罗经航向。
航向控制算法采用参数自整定模糊PID算法。该控制器为一个二输入三输出的自适应摸糊控制器。以航向角偏差e和偏差变化率Δe作为输入,PID控制器的三个参数Kp、Ki、Kd作为输出。模糊控制器中,模糊决策采用Mamdani型算法,解模糊算法采用重心法。
3.3 随动控制
随动指令舵角信号和实际舵角反馈信号均通过串口采集,采用Bang-Bang控制律,设定门限值。
3.4 应急操舵
当以上功能都不起作用的时候,可以采用应急操舵。应急操舵分为远程和本地,既可以在驾驶台操舵,也可以在舵机舱进行操舵。应急操舵在结构设计时与以上的回路相隔离,采用单独的回路,直接控制电磁阀来驱动液压舵机。
软件部分除了对必要的数据信息处理以及控制算法进行了详细设计以外,还充分体现了人机友好的思想,所见即所得。界面上显示了操舵人员想要的所有数据系统工作状态。除此之外,软件还设计了系统故障声光报警,根据状态采集和数据采集板反映的信息,自动进行系统诊断,不仅可以提醒相关人员尽快进行修理,而且还快速制定了故障模块,快捷方便。为了适应不同光照下的航行,尤其是黑夜里的航行,显示软件还设计了16级的调光环节。
考虑到船舶自身以及海洋环境的不同,软件还设计了“装载”、“海况”和“舵角比例”选项。操作人员可以根据船舶自身的吃水深度来选择不同的“装载”,根据风、浪、流的实际情况来选择不同的“海况”,以及通过“舵角比例”来调节不同的航向精度。
4 样机测试
研制出来的航迹自动操舵仪样机在仿真系统中进行模拟仿真。仿真系统可以选择不同的船模、不同的海况和不同的航行区域,增强了仿真的可信度。通过仿真测试可知,航迹自动操舵仪样机可以很好的跟踪预定航线计划,偏差在100 m之内。当电子海图中当前航线改变时,航迹自动操舵仪能够及时修改当前航向以跟踪最新的航线计划。
5 结 论
本文在现有航向自动操舵仪的基础上设计了一种基于PC/104的数字式航迹自动操舵仪,本次设计是对航向自动舵功能的拓展,并且经过系统仿真,得到了理想的航迹跟踪效果。
[1]鞠世琼.船舶航迹舵控制技术研究与设计[D].哈尔滨:哈尔滨工程大学,2007.
[2]周永余,陈永冰,周岗,等.航向、航迹自动操舵仪船舵控制系统的研制[J].中国惯性技术学报,2005,13(3):47-51.
[3]LEE G,SURENDRANS,KIM S H.Algorithms to control the moving ship during harbor entry[J].Applied Mathematical Modeling,2009,33(5):2474-2490.
[4]熊远生,俞立,徐建明.数字式航向航迹自动操舵仪的设计与实现[J].中国惯性技术学报,2009,17(2):175-178.
[5]潘为刚.基于ARM的随动操舵系统的研制[J].船海工程,2008(3):146-148.
