船舶航向计算动词PID自动舵设计
2013-08-10李沁生于家凤徐静徐靖
李沁生,于家凤,徐静,徐靖
(1. 江苏海事职业技术学院, 南京,211170;2. 天津海运职业学院,天津,300350;3. 中国船级社实业公司天津分
公司,天津 300457)
0 引言
船舶自动舵是使船舶在航行时保持设定的航向的一种自动控制系统。PID控制律是较早且现在仍广泛应用于船舶自动舵的一种控制方法。经典PID控制律存在诸如参数在线整定困难、适应性差、鲁棒性差和控制精度低等问题[1]。这些缺点使经典PID控制已不能很好的满足现代船舶自动舵的要求。因此,许多学者利用模糊控制、神经网络、专家系统、遗传算法、群智能优化等智能算法来改善PID控制器的性能。
本文受文献[2]中计算动词理论的启示,将其引入船舶运动控制领域。针对非线性船舶运动模型,文章探讨了一种计算动词PID控制器在船舶航向自动舵中的应用。
1 船舶运动的数学模型
1957年Nomoto建立了响应型的船舶运动数学模型[3],描述了以舵角δ为系统输入,航向角ψ或首摇角速度r为系统输出的动态系统:

对于具有大惯性的船舶,在低频段时,式(1)可降阶为:
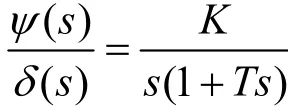
即有
其中, T=T1+T2-T3,T1、T2、T3是船舶运动模型的追随性操纵性指数,K是旋回性操纵性指数。式(2)即为著名的线性Nomoto模型,广泛应用于船舶自动舵的控制器设计[1]。
Bech将船舶稳态回转非线性特性总结为[3]:

把式(2)和式(3)结合起来有:

一般认为船舶是关于中心轴对称的,所以 h2=h0=0,所以有:

其中, T, K, h3, h1可由船舶的稳态回转实验确定。式(5)即为著名的Norrbin非线性船舶操纵模型[3]。为了更严格地测试所设计控制器的性能,本文以此模型作为研究的控制对象。
2 计算动词理论的预备知识

其中,T⊆R和 Ω⊆ Rn分别表示时间和所涉及的全局信息。
计算动词理论是厦门大学杨涛教授于 1997年创立的。经过十几年来不断的完善,已经在自动控制、数据挖掘、信号处理、故障诊断、认知学等领域显示出巨大的解决复杂问题的能力[2]。
人类语言中有名词和动词两个中心,其他各类词用来修饰名词和动词。名词即状态Being是模糊理论的中心,以 Becoming为代表的动词则是计算动词理论的中心[2]。
2.1 计算动词的定义
计算动词理论的一个显著特点为动态特性。在工程中,一个计算动词V可以由下面的进化函数(evolving function)来定义[2]:
2.2 计算动词的规范化形式
为了能在计算机上灵活实现, 可为各类的控制器选择一些规范化的计算动词。在动词PID控制器中选become。它以become(state1,state2)来描述"become from state1 to state2"的变化过程,其中state1和 state2可以是模糊的数值或者当前一个具体的数值。
2.3 计算动词相似度
对动词相似度的定义如下:
假设两个动词V1和V2,它们的动词相似度S(V1,V)应该满足如下的条件[2]:
1) S(V1,V2)∈[0,1];
2) S(V1,V2)=S(V2,V1);
3) 如果 V1=V2则S(V1,V2)=1,其中V1=V2表示两个计算动词有相同的进化函数。
2.4 计算动词逻辑与计算动词控制规则
计算动词逻辑是动词推理的基础,它处理动词语句的真假程度。例如“如果机器人看到球,那么它就踢球”。动词控制是建立在一组动词“IF-THEN”规则上的控制。
3 计算动词PID控制器的设计
3.1 计算动词PID控制器的基本结构
闭环反馈系统动词PID控制器的组成结构框图如图1所示:
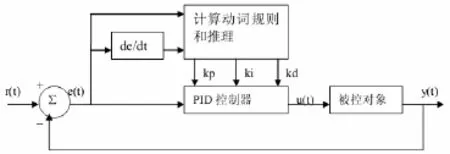
图1 计算动词PID控制系统的基本结构
经典数字PID控制器的表达式为:
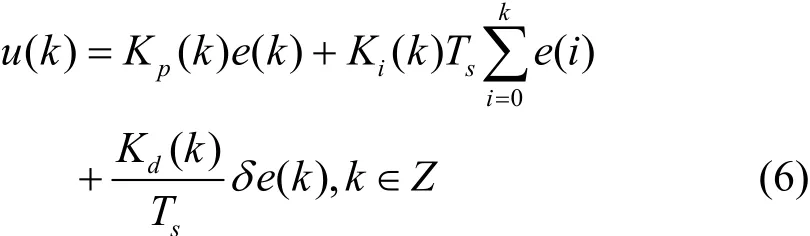
Ts为数字控制器的采样时间,u( k)和e( k)分别是在采样时间kTs点的控制信号和控制误差。在采样时间点kTs上, Kp(k),Ki( k)和 Kd(k)分别是比例系数,积分系数和微分系数。规定增益 Kp(k)和Kd(k)的取值范围分别为[Kp,Kp]和[Kd,Kd]。通过式(7)将Kp和Kd归一化,使其取值在[0,1]之间。

在公式(8)中,通过参数γ来定义Ki的值。

参数γ的归一化:

3.2 计算动词规则库的建立
根据表 1,2,3中的计算动词规则[2]来调整K~p,K~d和γ~。
各动词规则表中,,,仅有两个规范的动词 become(small,big)和 become(big,small)。而,,被归一化至[0,1]区间,设 big=1,small=0,则 become(small,big)和 become (big, small)的进化函数由式(10)给出:
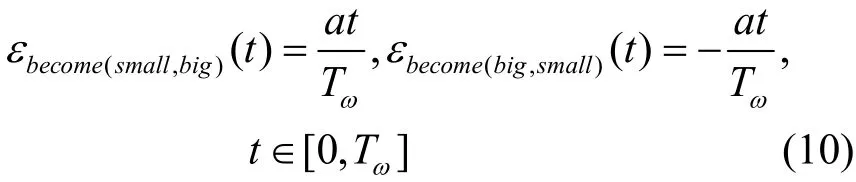
其中,a >0是常数,用来调节增加和衰减的程度;Tω=ωTs,是时间窗口的长度,ω 称为数据窗口长度。
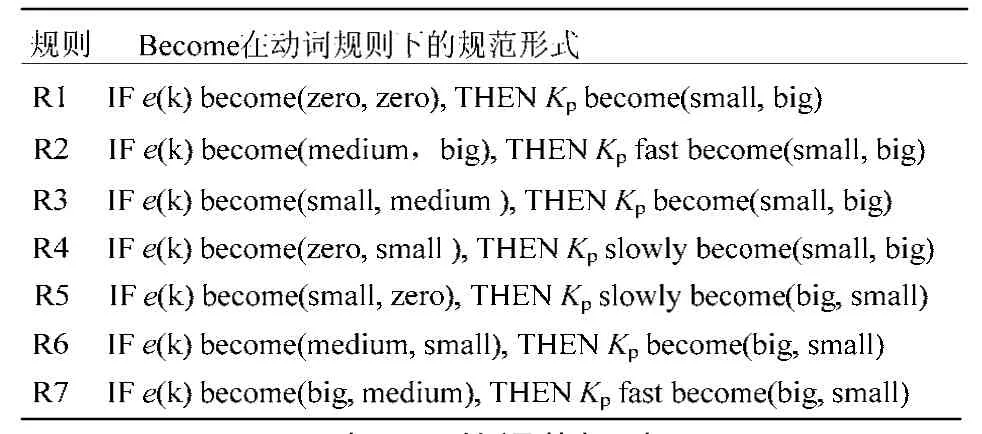
表1 Kp的调节规则
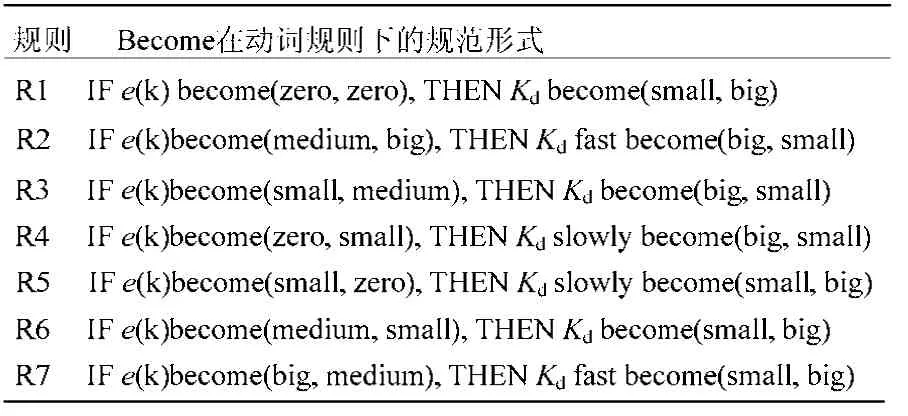
表2 Kd的调节规则
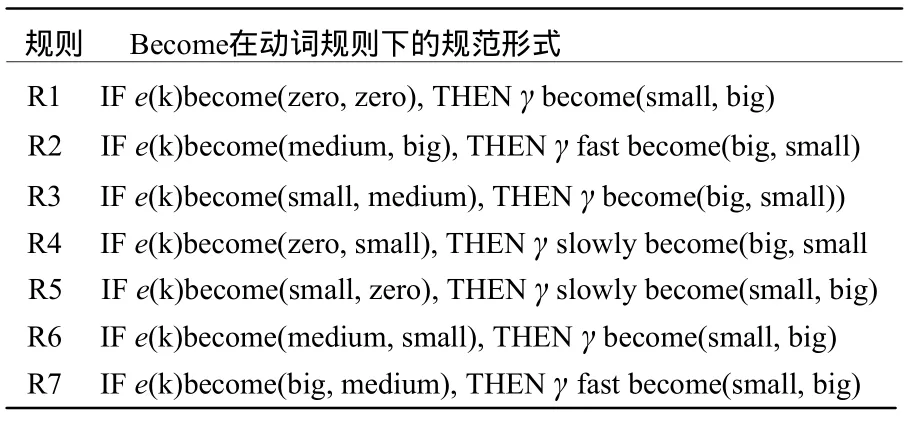
表3 γ的调节规则
各动词规则表中,只有两个副词,fast和slowly,其进化函数由式(11)给出

3.3 计算动词相似度的确立

在连续时间里,把误差e(k)的观察动词Ve和become(state1,state2)之间的动词相似度表示为:其中 Δ,即 delta表示误差 e(k)的变化量,delta=e(k+1)-e(k);f的取值与制定的动词相似度规则有关,如图 2所示,f的绝对值越大,动词相似度曲线越平缓,即反映 e(k)变化越慢。利用误差 e(k)不同的变化趋势来制定动词相似度规则,动词相似度的推理规则如表4。
3.4 计算动词PID控制器的实现
由动词规则表,(k)的更新由下面2步完成:

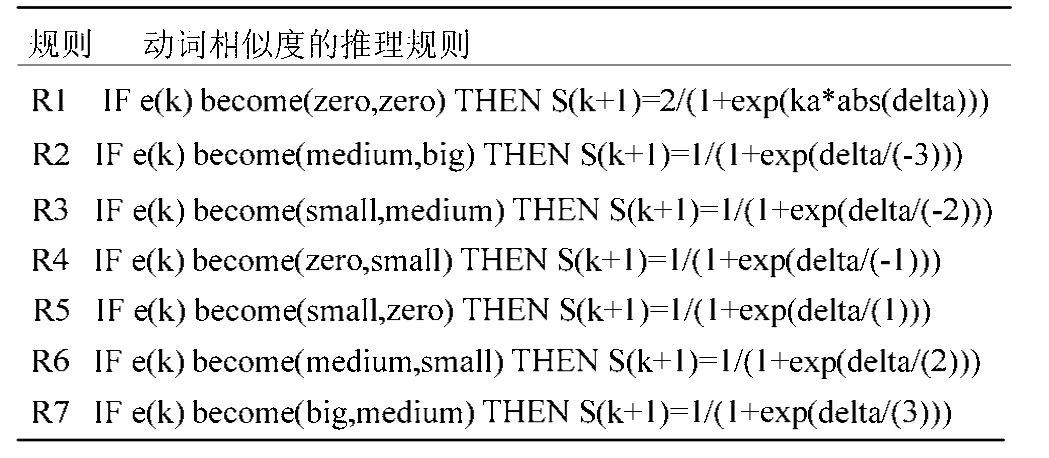
表4 动词相似度的推理规则
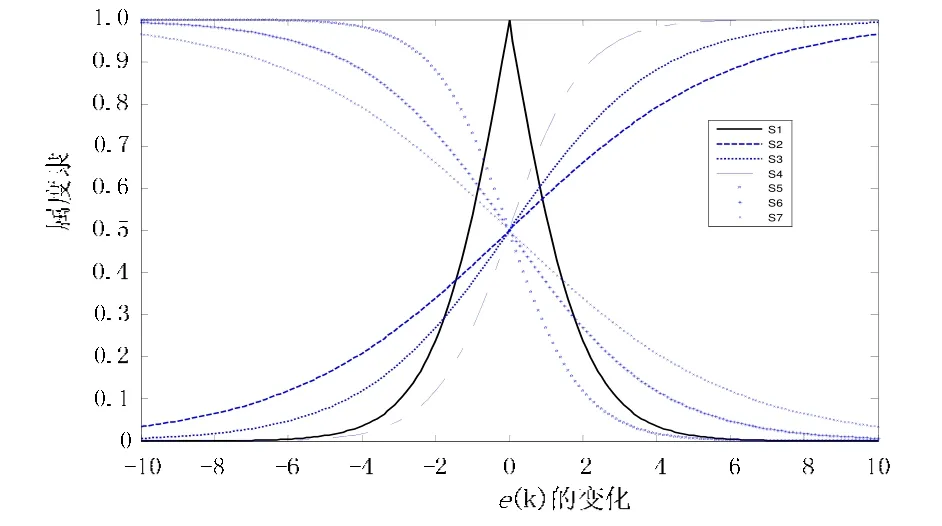
图2 e(k)变化趋势的动词相似度曲线图
其中 becomei(i=1,2,3,4,5,6,7)依次对应于规则中e(k)的7个规范化的计算动词.则下一阶段预置的比例增益为:

在每个采样间隔 Ts里,become的变化量由式给出:
利用类似的方法可以分别通过相应的动词规则表求得 Δ(k )和 Δ(k)。
4 仿真实例
运用MATLAB软件仿真,计算动词PID控制器的设计参数为:各参数初始值为Kp=3.35,Kd=100,γ=90;各参数值范围为 Kp∈[1,10],Kd∈ [2,600],γ∈ [500,6000];采样间隔时间 TS=1,时间窗口Tω=1;动词相似度规则1中的ka=200,式(11)中的 α1=1,α2= 10,式(14)中,求 ΔK~p(k )时a=0.15,求 Δ K~d(k )时 a=0.2,求 Δγ~(k)时 a=10。
以文献[5]采用的15000吨油轮模型为例,船舶模型参数为:K=0.16,T=83,h3=30,h1=1。误差e(t)=ψd-ψ,ψd为设定航向角;设定船舶航向角为10º,仿真结果如图3所示:
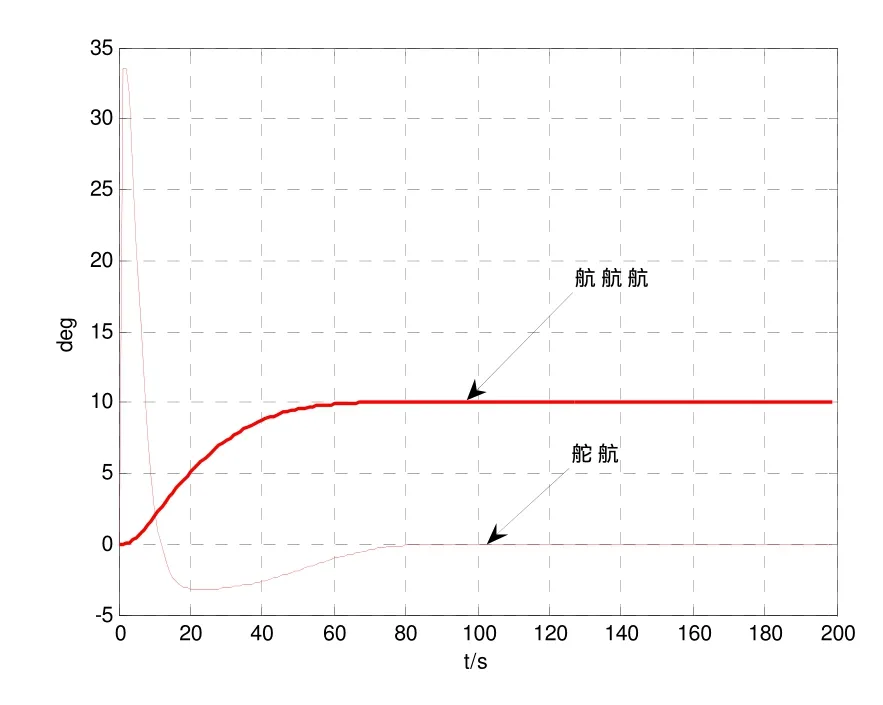
图3 油轮的实际舵角和航向角的响应曲线
以文献[4]采用的万吨级远洋教学实习船模型为例,船舶模型参数为:K=0.42, T=216.73,h3=30,h1=1。计算动词 PID控制器的设计参数不变,设定船舶航向角仍为 10º,仿真结果如图 4所示。
观察图3和图4中的曲线变化可知,实际航向能够快速无超调地跟踪设定航向,且施舵时,舵角变化先急后缓,动舵次数少,达到了很好的控制效果;通过对比图3和图4的仿真结果不难看出,当船舶模型参数发生较大变化时,仿真结果变化很小,即船舶实际航行时,即使模型发生较大的参数摄动,所设计的计算动词PID控制器的控制性能仍表现优良,显示出极强的鲁棒性。
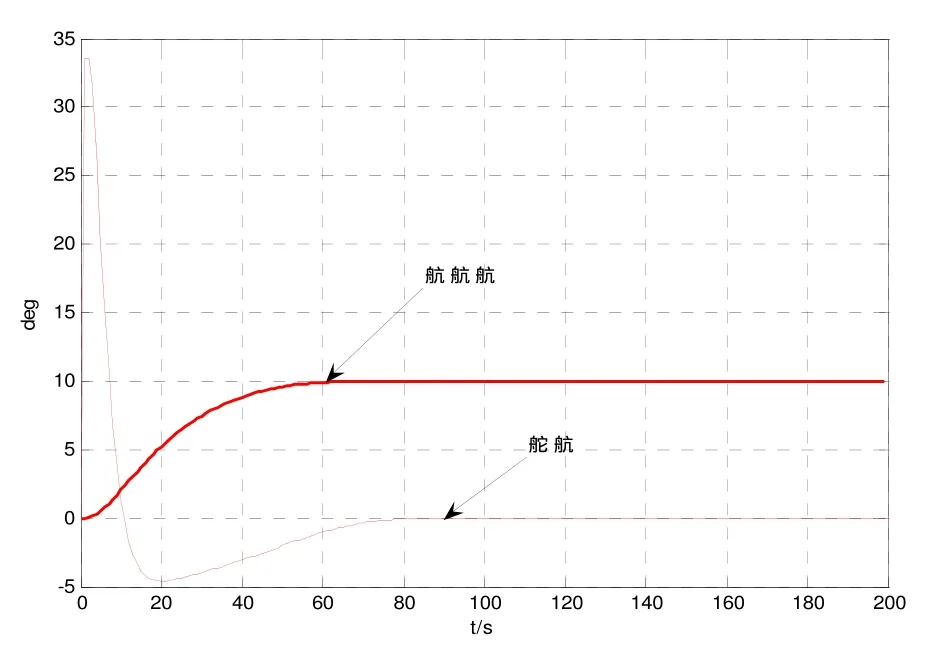
图4 教学实习船的实际舵角和航向角的响应曲线
5 结论
船舶航向控制是船舶运动控制研究的基本内容之一,它直接关系到船舶航行的安全性和经济性.本文基于计算动词理论,设计了一种计算动词PID控制器,将其应用于非线性船舶运动模型.仿真试验表明,计算动词PID控制算法控制策略简明,推理过程简单,性能优良,计算量小,易于用计算机实现其推理过程,可以预见在船舶控制领域具有较高的实用价值和良好的应用前景。
:
[1]贾欣乐, 张显库. 船舶运动智能控制与H∞鲁棒控制[M]. 大连: 大连海事大学出版社, 2002.7
[2]杨涛.计算动词理论及应用[M].厦门: 厦门大学出版社,2011.3.
[3]史震, 姚绪梁, 于秀萍. 运动体控制系统[M].北京:清华大学出版社, 2008.5
[4]杜佳璐, 郭晨, 张显库. 船舶运动航向自适应非线性控制的仿真研究[J]. 系统仿真学报, 2006, 17(6):1445-1448.
[5]Xingcheng W. Ship steering nonlinear control based on backstepping design approach[J]. IEEE, Proceedings of the 6th World Congress on Intelligent Control, 2006,Dalian, China.
