基于单片机的结晶器钢水液位检测系统设计
2013-08-10王景存
周 洋,王景存,黄 亮
(武汉科技大学 信息科学与工程学院,湖北 武汉 430081)
连铸生产中,结晶器作为连铸机上的一个关键设备,其钢水液位的控制精度直接影响着钢坯的质量和产量。结晶器钢水液位的检测方式有热电偶埋入法、工业电视法、周期性电极插入法、放射性同位素法、涡流法、电磁感应法和激光法等等。目前连铸机结晶器上广泛采用的方法是放射性同位素法、涡流法和激光法[1]。
本系统是一种基于单片机的涡流型结晶器钢水液位检测系统。由激励产生、涡流传感、信号放大、精密检波和单片机控制等四部分组成,激励产生电路主要用于产生50 kHz的正弦波信号,经过放大后作为传感器的激励源,涡流传感器感应出的液位信号经放大和精密检波后输出0~5 V的直流电平。最后由单片机通过A/D转换和线性化输出4~20 mA的电流信号到PLC控制器。
1 测量原理
根据法拉第电磁感应原理,块状金属导体置于交变的磁场中或在磁场中作切割磁力线运动时,导体内将产生呈涡旋状的感应电流,此电流叫电涡流。以上现象称为电涡流效应[2]。
电涡流传感器的核心部分由两组线圈组成,包括一个激励线圈和两个感应线圈。电涡流传感器中的电磁信号在钢水表面产生涡电流,此涡电流在传感器线圈中产生感应信号,其大小随钢水表面到传感器的距离而变化。
通电线圈与金属导体之间的电涡流效应如图1所示。当通有一定交变电流Is(频率为f)的电感线圈L靠近金属导体时,在金属周围产生交变磁场,在金属表面将产生电涡流I1,根据电磁感应原理,电涡流也将形成一个方向相反的磁场。磁电涡流的闭合流线的圆心同线圈在金属板上的投影的圆心重合[3]。

图1 涡流互感效应示意图Fig.1 Eddy current mutual inductance effect schematic diagram
涡流渗透深度:

式中:ρ——电阻率(Ω·mm2/m);μ——相对导磁率;f——Is的频率(Hz)
对金属材料而言,若Is和L等的参数已定,金属板的厚度t>>h渗透深度时,则表面感应的涡流I几乎只取决于线圈L至金属板的距离H,而与板厚及电阻率的变化无关[4-5]。
2 系统设计
2.1 系统框图
如图2所示,振荡器产生的振荡信号经过滤波、整形放大后,与电涡流传感器的反馈信号相乘,最后经过功率放大推动电涡流传感器的激励线圈。传感器利用电涡流效应得到钢水液位的感应信号,此感应信号经过放大、滤波、检波、A/D转换及线性化处理后通过单片机得到0~150 mm范围内的实际钢水液位值,再利用D/A转换输出4~20 mA的标准信号用于PLC控制系统控制连铸机中包车水口滑板,实现全自动浇铸。

图2 液位检测系统框图Fig.2 Liquid level detection system block diagram
2.2 硬件设计
2.2.1 激励信号电路
如图3所示,激励信号电路主要由振荡源电路、滤波电路和整形放大电路组成。其作用是为涡流传感器的激励线圈提供激励信号。
振荡源振荡信号频率及幅值的稳定性直接影响到检测精度,而生产现场环境较为恶劣,普通振荡源性能无法满足性能要求,因此选用高精度可编程振荡器5G8640。该芯片具有输入阻抗高,抗干扰能力强,功耗低,驱动能力强等特点,与标准CMCS电路兼容,使用灵活方便。主要适用于高精度仪器仪表及电子设备控制系统[6]。
图3(a)中通过设置5G8640的CSEL管脚为低电平选择片内600M晶振,设置CTL3~CTL1管脚为高电平和CTL4~CTL6管脚为低电平选择12分频,最终由OCTPF管脚输出50 kHz方波振荡信号,经R1上拉输出再由C7、R23滤波电路输出。 C1、R5、C2、IC1、IC7 组成整形放大电路,见图 3(b),将50 kHz的方波振荡信号经过整形及两次放大后变为幅值较大并且稳定的正弦波信号。在整形放大电路中通过调整C2大小可改变正弦波的失真度,得到一个波形不失真的正弦波信号。
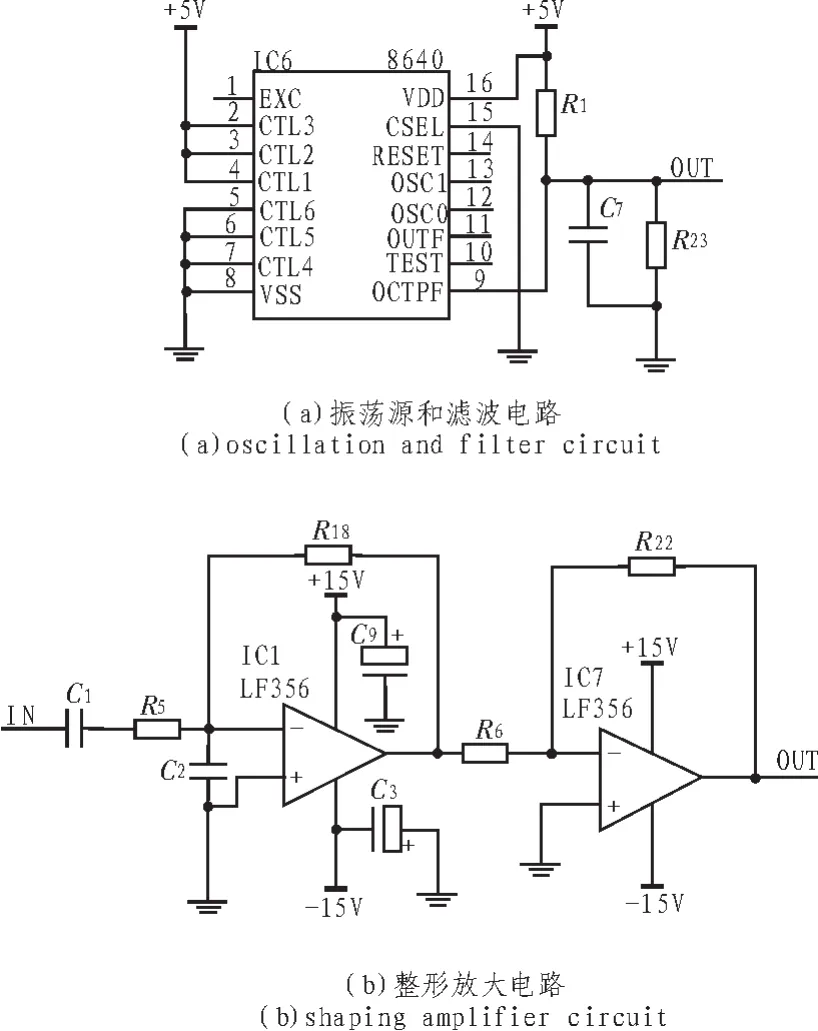
图3 激励信号电路Fig.3 Excitation signal circuit
输出的正弦波信号与电涡流传感器的反馈信号经乘法器相乘后进行功率放大,最终为电涡流传感器提供激励信号。电涡流传感器利用这个激励信号在钢水表面产生电涡流,进而在传感器感应线圈中得到感应信号,以此测量钢水液位值。
2.2.2 信号检测电路
如图4所示,信号检测电路主要由前级放大电路、滤波电路和检波电路3部分组成,其作用是检测涡流传感器中感应线圈的信号。

图4 信号检测电路Fig.4 Signal detection circuit
R28、R29和涡流传感器绕感应线圈S1、S2,组成桥式信号检测输入,能提高输入信号分辨率及电路的抗干扰能力。IC8及电阻构成前级放大电路,如图4(a)所示,利用VR2调整检测放大输出电路的平衡。
L1、C16、R42组成选频网络,输入信号经选频网络,将有效信号传输给由IC10及电阻组成的放大器进行放大输出,如图4(b)所示。选频网络能有效阻止干扰信号,只有在有效频率信号范围内的信号才能被选频网络选通,起到对现场非有效频率信号的阻隔。
选频放大后的信号经过C17耦合到由IC11、电阻及二极管D2、D3组成的检波电路,如图4(c)所示,将信号幅值随钢水液位变化的正弦波检波输出为直流信号。
这3部分电路后面还接有两级加法电路,主要用于温度补偿和零点调整。检波输出后的直流信号随后同补偿电路输出的补偿信号一起经过第一级加法器叠加,输出后再同调零电路经过第二级加法器叠加,得到0~5 V电压信号。最终使得钢水的液位在0~150 mm变化时,直流电压信号在0~5 V变化。
2.2.3 其他电路及作用
除了上文提及到的乘法器电路、功放电路、补偿电路、调零电路和加法电路外,系统还有以下电路:电源电路,为系统各电路模块提供工作电源;AD电路,将检测到的模拟信号如0~5 V电压值;温度检测电路,将传感器温度转换为数字信号提供给单片机处理;DA电路,将电压信号转换为4~20 mA电流信号输出给PLC使用;单片机系统及外围电路,如程序下载口、按键、指示灯、蜂鸣器、继电器和光耦输入输出隔离保护电路等。
3 系统测试结果与分析
由于输出的液位电压信号并不是完全线性化的,所以必须用程序对其进行线性化调整。系统根据生产中的实际使用情况,为了满足设计精度的要求。采用16点线性化,较好地反映出实际液位的变化。表1为经过16点线性化后,经过多次测试后得出的系统测量值与标准值之间的关系。
通过表中数据可以看出,系统的测量值与标准值相差在±2 mm之间,符合设计要求,达到了预期的检测精度。在实际生产中钢水液位一般维持在75 mm左右,系统在此区间内的实际运行截图如图5所示。因为系统在程序中已经对结晶器振动台的震动波进行了滤除处理,所以曲线摆幅不大,图5中的曲线反映了实际生产过程中的运行检测过程。
4 结束语
系统通过不断的设计改进,使得系统的抗干扰能力得到进一步提高。除此之外,系统还增加了自动增益补偿功能、线性化设置功能、自动校准功能和实时数据显示等众多功能,有效测量距离达到0~150 mm,并保证了测量精度,能够实现在无人值守的情况下的系统自我校准和恢复,极大的减轻了系统维护的工作量,已在国内多个钢厂得到实际应用。
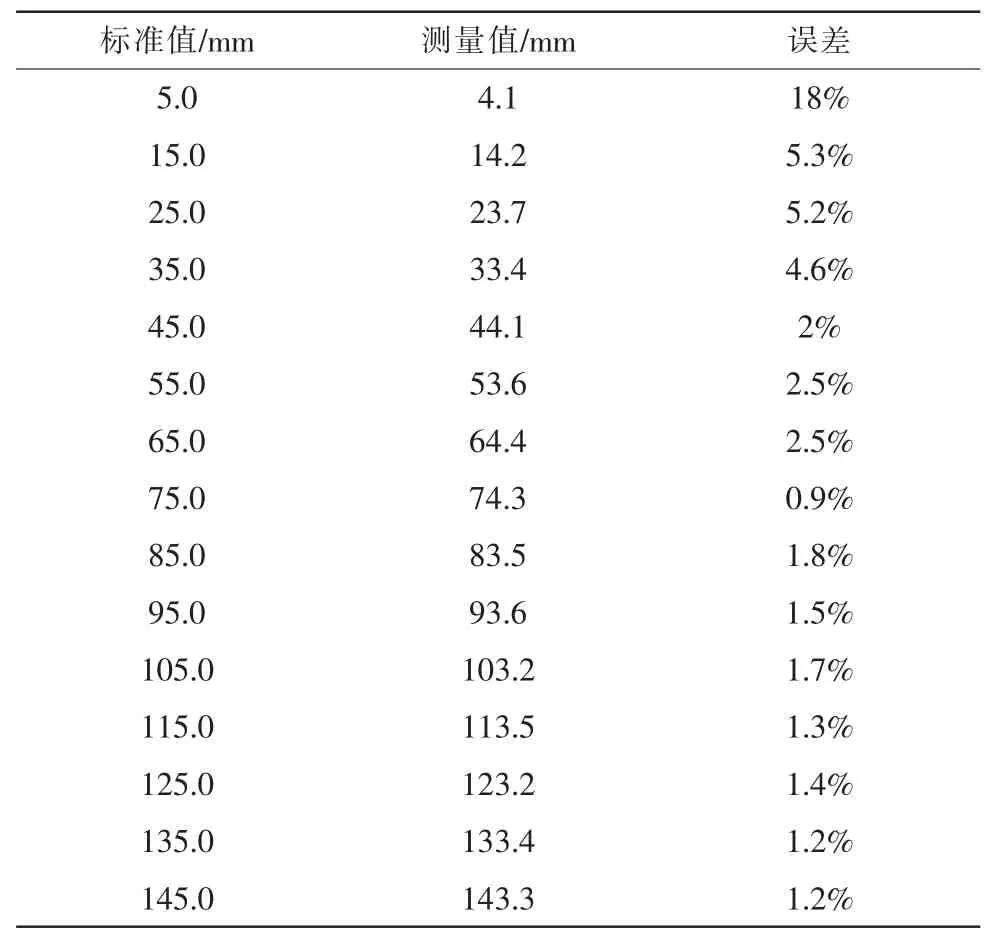
表1 线性化后标准值与测量值对比Tab.1 Contrast of standard value and the measured value after linearized
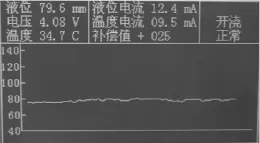
图5 实际效果图Fig.5 Effect picture
[1]尤克强.连铸机结晶器熔钢液位控制[J].自动化仪表,1992(9):22-23.YOU Ke-qiang.The continuous caster melting liquid level control[J].Process Automation Instrumentation,1992(9):22-23.
[2]郁有文,常健.传感器原理及工程应用[M].西安:西安电子科技大学出版社,2000.
[3]陶艳红,余成波.传感器与现代检测技术[M].北京:清华大学出版社,2010.
[4]Yu YT,Du Pa.Research on the correlation between measured material properties and output of eddy current sensor[C]//2005 IEEE International Conference on Industrial Technology,Hong Kong,2005:428-431.
[5]Carey WP,Yee SS.Calibration of nonlinear solid-state sensor array using multivariate regression models[J].Sensors and Actuators B,1992,9(1):113-122.
[6]王益民.5G8640系列可编程振荡器电路[J].晶峰器件应用,1992(26):5.WANG Yi-min.The 5G8640 series programmable oscillator circuit[J].JINGFeng Device Applications,1992(26):5.