战斗机动态逆控制律对比研究
2013-08-09龙晋伟潘文俊王立新
龙晋伟,潘文俊,王立新
(北京航空航天大学航空科学与工程学院,北京100191)
0 引言
为满足新一代战斗机超机动性的要求,必须解决大迎角/过失速状态下的机动控制问题。非线性动态逆控制律是解决该问题的一种经典方法。该方法根据逆系统理论,通过反馈系统的非线性函数对消系统的非线性,得到全局线性化的伪线性系统,同时完成系统解耦。这种方法既可独立完成大量控制任务,也可作为自适应、鲁棒控制等更完备的控制律的设计基础,概念直观,适于工程应用,并已用于F-35B[1],X-48B[2]等飞机的控制律设计。
动态逆方法存在多种类型,本文选择了其中较为基础且典型的常规动态逆和模型参考动态逆进行研究。
1 被控对象
本文以F-16/MATV(Multi-Axis Thrust Vectoring)飞机为被控对象[3]。该机是由典型的第三代战斗机F-16加装推力矢量喷口改进而来的试验飞机。其本体机动特性良好,加装推力矢量后可以近似模拟新一代战斗机的基本特点,是一种较好的先进飞行控制系统和飞行品质研究平台。该机具体的数学模型见文献[3-4],采用的气动模型中,迎角、侧滑角、马赫数的范围分别为 -20°~90°,-30°~30°,0.2~0.6,可在较大飞行包线范围内反映飞机的运动特性。
2 常规动态逆控制律
常规动态逆控制律基于奇异摄动方法,根据飞机状态变量的变化快慢进行时标分离,然后对分离所得各组变量求逆以近似实现反馈线性化[5]。
根据时标分离结果,飞机常规动态逆控制律一般包括内、外两层回路。内回路跟踪飞机快变量(机体轴角速度p,q和r),以飞机全部气动舵面和推力矢量为控制变量;外回路以飞机较慢变量为控制指令,飞机快变量为控制变量。
根据超机动战斗机非线性动态逆设计的一般方法[6-7],可设计得到适用于本文被控对象的常规动态逆控制律,其基本结构如图1所示。

图1 常规动态逆基本控制结构Fig.1 Block diagram of the conventional nonlinear dynamic inversion control law
3 模型参考动态逆控制律设计原理
模型参考动态逆控制律是在常规动态逆内回路控制律的基础上,加入根据期望的飞行品质设计的理想参考模型和比例积分补偿器而构成。这一控制律通过动态逆获得良好的跟踪能力,通过理想参考模型获取期望的飞行品质,从而实现了信号跟踪能力和飞行品质在飞控设计中的分离。
典型的模型参考动态逆控制结构[8]如图2所示。驾驶员操纵输入指令经理想参考模型生成理想跟踪指令 ωref,与飞机状态反馈信号 ωs(包括 ps,q和rs)综合,通过比例积分补偿器生成控制指令ω·c(包括p·s,c,q·c和r·s,c)输入动态逆内回路,计算获得最终控制变量u作为飞机本体的输入。
需要指出的是:横航向通道理想参考的输出为稳定轴角速度指令,其在通过补偿器后还需通过坐标转换才能得到与动态逆模块相匹配的机体轴角加速度控制指令。

图2 模型参考动态逆基本控制结构Fig.2 Block diagram of themodel reference dynamic inversion control law
图2中动态逆内回路未进行机体轴角速度的反馈综合而直接以ω·为控制指令,通过其非线性对消作用,飞机和动态逆飞行控制闭环系统在理想状态下简化成了一个从机体轴角加速度到角速度的积分环节,拥有令人满意的指令跟踪能力,为进一步的控制律设计奠定了基础。
3.1 理想参考模型
相对于常规动态逆,模型参考动态逆的最大变化在于其引入了基于飞行品质设计的理想参考模型,通过动态逆系统跟踪该参考模型,使飞机在较大的飞行范围内获得期望的飞行品质。
飞行实践表明:驾驶员对动态特性与经典飞行相似的高阶飞机给出的飞行品质评价一般较好[9],因此可用高阶飞机的低阶等效系统来代表其飞行品质特性。这就是飞行品质的等效系统方法的基本原理,也是本文设计理想参考模型时的主要依据。
与飞行品质评估的思路类似,理想参考模型分别按俯仰轴、滚转轴和偏航轴进行设计。本文以俯仰轴为例,给出理想参考模型的设计方法。
针对战斗机大迎角机动任务特性,其俯仰轴飞行品质主要体现为等效系统短周期品质。所以,参照MIL-STD-1797A中对飞行品质规范的相关要求[10],俯仰轴驾驶杆位移 δep与参考模型输出的俯仰角速度指令 qRM之间的关系即俯仰轴参考模型[8]为:

式中,ωsp和ζsp分别为飞机纵向理想的短周期频率和阻尼;1/Tθ2为期望的飞机轨迹响应频率;Kq/Tθ2为模型稳态增益,与单位过载杆力有关。
3.2 比例积分补偿器
控制律设计时,模型的不确定性与外界扰动等都会引起系统误差。为消除这些误差,改善系统鲁棒性,模型参考动态逆控制结构中需要采用比例积分环节进行补偿。注意补偿器不应给闭环系统中引入新的极点[8]。因此对于俯仰轴,可分别取 kp=2ζspωsp,ki= ω2sp。根据以上整定结果,得到的俯仰轴带补偿器的理想参考模型结构如图3所示。
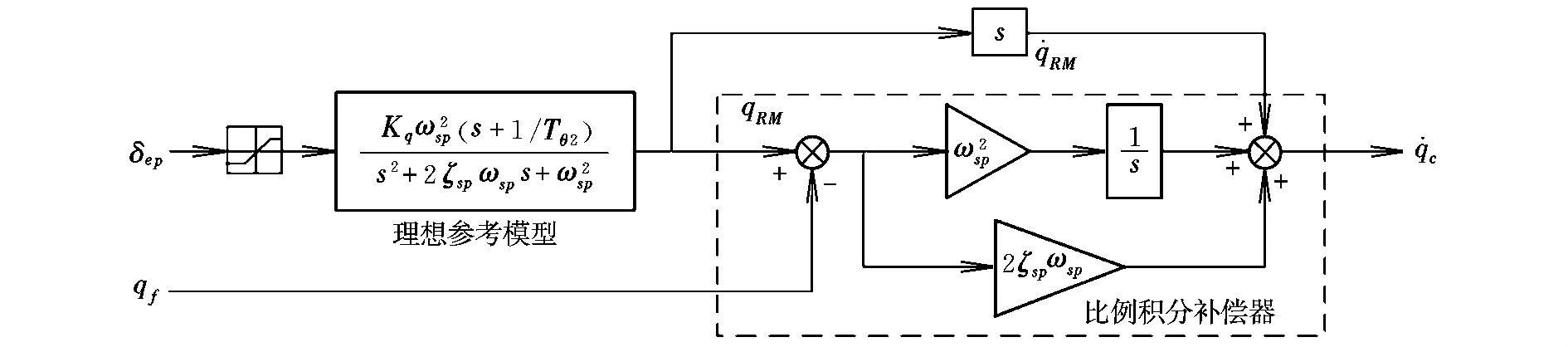
图3 带比例积分补偿器的俯仰理想参考模型Fig.3 Block diagram of the pitch referencemodel with a PI compensator
4 控制律对比
常规动态逆和模型参考动态逆横航向控制是类似的,滚转轴旨在控制飞机绕速度轴滚转,偏航轴旨在消除侧滑,使飞机可以实现协调转弯。但在俯仰轴的控制上,二者存在着显著差异,主要表现为:(1)指令系统不同。常规动态逆控制迎角,模型参考动态逆控制俯仰角速度;(2)设计目标不同。常规动态逆谋求对特定指令良好的跟踪能力,而模型参考动态逆的设计目标是使飞机具有所设计的期望的飞行品质。
以下分别通过开环时域响应和闭环飞行品质来对比这两类控制律。
4.1 开环时域响应对比
两类控制律在指令系统和设计目标上的不同对其开环时域响应有明显影响。阶跃信号常被用于检查系统的开环响应,但其并非战斗机空战任务中典型的驾驶员输入,因此并不适于本文涉及的控制律响应对比。与其相比,高频正弦信号更适于检验飞机在驾驶员频繁补偿下的响应特性。
在相同的驾驶杆高频正弦输入下,两类动态逆系统各自生成的控制指令和对应的飞机响应如图4所示。其中常规动态逆的跟踪存在明显滞后和超调(见图4(a)),而模型参考动态逆响应迅速,基本无超调,跟踪效果良好(见图4(b))。
造成上述差异的原因有两个方面:一是指令系统的选择;二是是否考虑了飞行品质的要求。
常规动态逆纵向为迎角指令,而迎角属于较慢变量,故飞机在对较高频率的正弦指令信号进行跟踪时,响应的快速性较差,跟踪效果较差。此外,常规动态逆不存在提供纵向阻尼的环节,因此俯仰振荡发生后,其收敛速度也较慢。与常规动态逆相比,模型参考动态逆纵向以俯仰速度为跟踪指令,响应迅速。基于飞行品质设计的理想参考模型专门针对短周期响应特性进行了优化,故其正弦响应较为理想。
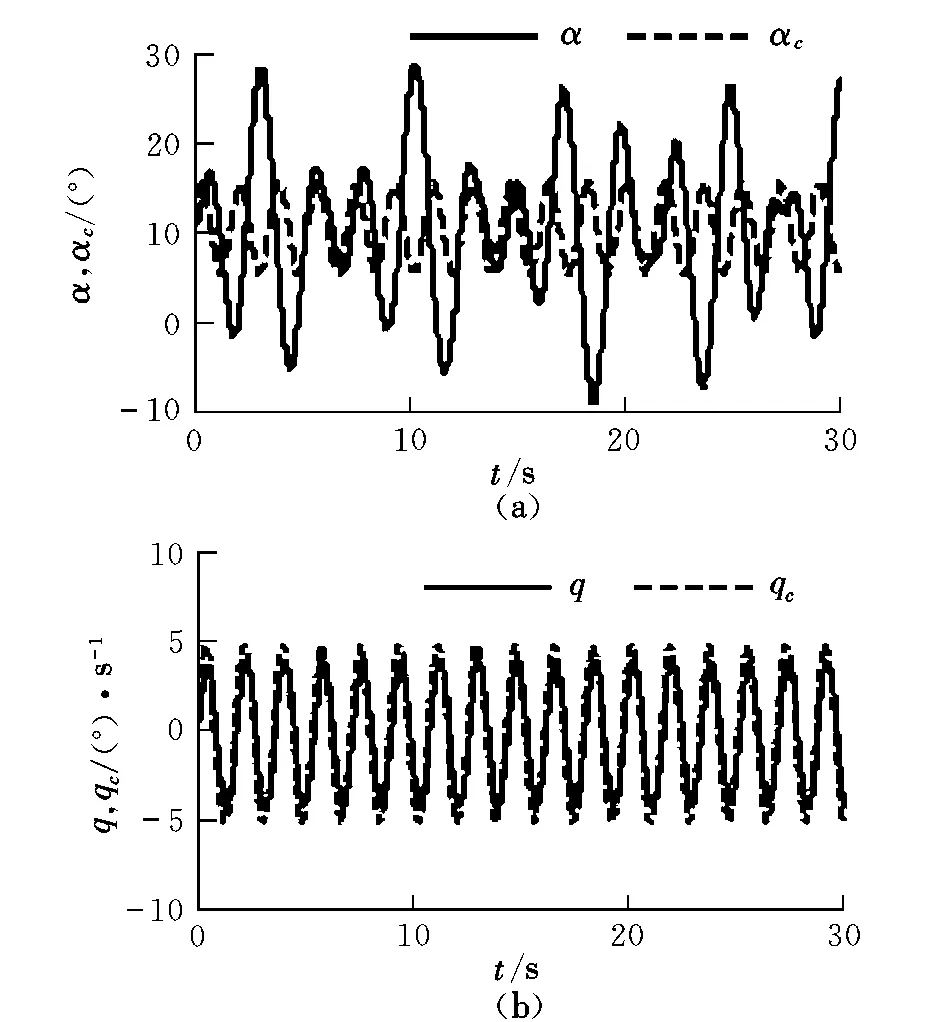
图4 不同动态逆正弦响应对比Fig.4 A comparison for sinusoidal response between two dynamic inversion control laws
4.2 闭环飞行品质对比
两类动态逆的不同特性会对战斗机的作战使用产生影响,基于闭环任务的飞行品质评估方法是研究这一影响的有效手段[9]。仍以俯仰轴为例,采用30°迎角纵向粗略截获任务,研究两类动态逆飞行控制律对战斗机闭环飞行品质的影响。
任务详细描述[11]如图5所示。初始时,目标机与测试机均在7 600 m高度做1g定直平飞。目标机先滚转进入下降盘旋,保持迎角为20°,速度为100 m/s左右。测试机待目标机偏离机头方向达到预定值之后,滚转进入目标机机动平面。稍作等待至相对目标机滞后可使测试机以30°迎角截获目标机时,迅速拉杆截获目标机并保持2~4 s的稳定跟踪,然后卸载完成任务。任务的完成情况根据其完成截获的时间和纵向超调的次数对照任务性能标准进行评定。
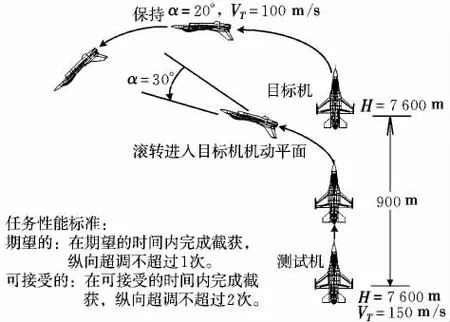
图5 纵向粗略截获任务示意图Fig.5 Illustration of the air-to-air longitudinal gross acquisition
驾驶员在环飞行测试在地面固定基座飞行模拟器上进行,3位驾驶员对采用两种不同动态逆控制律的飞机共进行了30组对比测试。驾驶员飞行完成测试任务的总体评价及Cooper-Harper平均评分(CHR)如表1所示。
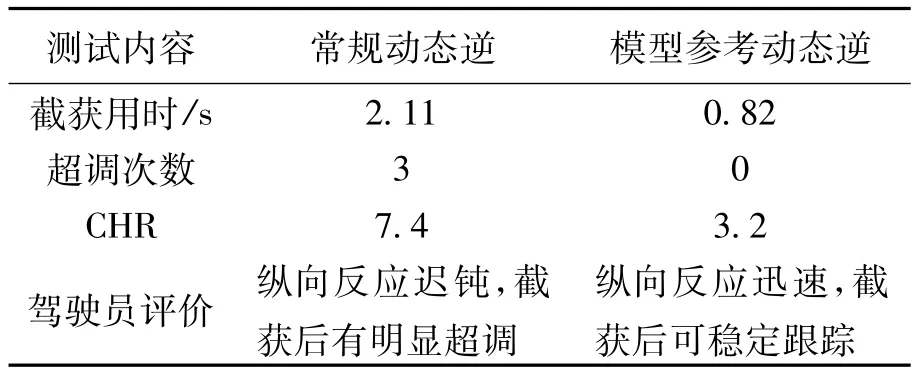
表1 飞行员评价及平均打分Table 1 Pilot ratings and comments
纵向粗略截获机动任务属于Ⅳ类飞机的A种飞行阶段,需要驾驶员的频繁补偿。由表1可知,采用模型参考动态逆的控制效果更好。由于A种飞行阶段是战斗机设计的重点,故模型参考动态逆更适于充当战斗机的基准控制律。
另一方面,常规动态逆在设计时未考虑飞行品质,其响应与驾驶员操纵习惯存在不同,这在一定程度上影响了其控制效果,降低了驾驶员评分,但表1的测试结果并不意味着常规动态逆飞行品质一定是糟糕的。驾驶员在环试验表明:对于无需频繁补偿的飞行任务,尤其是一些开环飞行任务,常规动态逆控制精度更高、驾驶员负担更轻,飞行品质评价更好。
5 结论
本文介绍了战斗机常规动态逆和模型参考动态逆控制律的设计方法,并通过开环时域仿真和闭环品质评估对两类控制律进行了对比分析,得出如下结论:
(1)两类控制律横航向类似,但纵向存在控制指令和设计目标两方面的不同;(2)常规动态逆阶跃响应良好但正弦响应较差,模型参考动态逆正弦响应理想但阶跃响应较为一般;(3)常规动态逆适于无需驾驶员频繁补偿的开环任务,模型参考动态逆在需要频繁操纵的闭环飞行任务中品质优良,较适合作为战斗机的基准控制律。
[1]W lker G,Allen D.X-35B STOVL flight control law design and flight qualities[R].AIAA-2002-6018,2002.
[2]Gadient R,Lavretsky E,Hyde D.State limiter for a model following control systems[R].AIAA-2011-6483,2011.
[3]Sonneveldt L,Chu Q P,Mulder JA.Nonlinear flight control design using constrained adaptive backstepping[J].Journal of Guidance,Control,and Dynamics,2007,30(2):322-336.
[4]Lewis B L,Stevens F L.Aircraft control and simulation[M].New York:John Wiley & Sons,Inc.1992:107-116.
[5]郭锁凤,申功璋,吴成富,等.先进飞行控制系统[M].北京:国防工业出版社,2003:247-266.
[6]Snell S A,Enns D F,Garrard W L.Nonlinear inversion flight control for a super maneuverable aircraft[R].AIAA-90-3406,1990.
[7]左军毅.推力矢量飞机非线性控制律设计研究[D].西安:西北工业大学,2003.
[8]Miller Christopher J.Nonlinear dynamic inversion baseline control law:architecture and performance predictions[R].AIAA-2011-6467,2011.
[9]高金源,李陆豫,冯亚昌,等.飞机飞行品质[M].北京:国防工业出版社,2003:59-117.
[10]USAir Force Department.MIL-STD-1797A Flying qualities of piloted aircraft[S].United States of America:U-nited States Department of Defense,1995.
[11]Wilson D J,Riley D R,Citurs K D.Aircraft maneuvers for the evaluation of flight quality agility Vol.2:maneuver description and selection guide[R].WL-TR-93-3802,1993.
