多尺度地图面/面目标匹配模式及变化探测方法研究
2013-08-08简灿良赵彬彬邓敏余丽钰
简灿良,赵彬彬,邓敏*,余丽钰
(1.武汉大学测绘遥感信息工程国家重点实验室,湖北 武昌 430079;2.中南大学地理信息系,湖南 长沙 410083;3.福建省基础地理信息中心,福建 福州 350003)
0 引言
随着空间数据量的急速增长,数据生产和应用部门对已有数据重用和质量改善的需求越来越迫切,亟须一种有效的技术手段用于空间数据集成和更新[1]。目前,一些发达国家的测绘部门已将工作重点从数据采集、建库转移到更新与应用方面,并在建立更新机制、利用遥感影像获取变化信息、历史数据存取等方面做了大量工作[2]。例如,美国地质调查局测绘部2001年在其国家地图计划(The National Map)中规划到2010年建立近实时数据更新机制,将数据的现势性保持在数月甚至几天之内[3];英国军械测量局(Ordnance Survey)根据实际情况建立了推帚式和散点式相结合的更新机制[4];日本GSI基于栅格采用先更新1∶2.5万地形图、再用1∶2.5万地形图更新1∶5万地形图的更新方法。
在多尺度地图之间传播更新,首先需要通过对空间目标几何、拓扑和语义进行相似性度量,识别出同一地区不同来源、不同尺度地图数据库中的同一地物,即目标匹配,进而通过比较、分析和识别判断两幅地图中的同名目标是否发生变化,即变化探测。变化探测是一个复杂而繁琐的过程[5],近年来遥感平台和传感器的快速发展使得国内外学者更关注遥感影像数据变化探测方法及评价等相关问题[6-8],主要集中在影像处理和影像数据时间维的操作方法上,对矢量地图数据变化探测方面的关注不够,研究成果较为零散[9-14],特别是对不同比例尺矢量地图更新过程中的变化探测研究更少。鉴于此,本文研究不同比例尺地图空间面目标的变化探测方法,主要是在目标匹配基础上,探讨多尺度地图空间匹配目标对之间的差异问题及其产生的原因,进而讨论空间面目标的变化类型、判别依据及变化探测等解决方案。
1 空间目标差异驱动因素和变化类型
1.1 空间目标表达差异驱动因素
导致不同比例尺地图空间中的同名目标间差异的原因(即差异驱动因素)主要包括:制图综合、实际变化和数据获取误差(图1)。数据获取误差导致的差异主要体现在不同来源的地图数据中,如不同部门同一地区同一时期的相同比例尺地图数据中,而同一地物的差异主要来源于数据获取误差。下面主要探讨制图综合和实际变化驱动的差异。
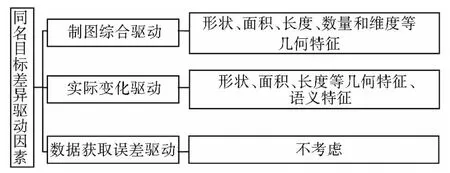
图1 不同比例尺地图空间同名目标之间的差异驱动因素Fig.1 The driven factors of discrepancy between corresponding objects from maps of different scales
1.1.1 制图综合驱动 地图符号是对地理要素的抽象表达,不同要素使用不同地图符号表达,同时亦与表达尺度直接相关。在不同比例尺地图中,同一地物表达的详细程度不同[15,16],并最终通过制图综合的方法实现。尤其对大比例尺地图数据进行制图综合派生出中、小比例尺地图数据时,综合操作算子[17](如选取、合并、夸大等)的运用,使得不同比例尺地图对同一要素的表达存在区别,显然,这种差异主要由制图综合驱动。如图2所示,图2a和图2c分别为较大比例尺面目标,图2b和图2d分别为与之相应的较小比例尺面目标。图2a和图2b匹配目标之间形状差异明显,即较大比例尺面目标西南方向的缺角经综合后被“简化”;图2c和图2d匹配目标间数量差异明显,即3个较大比例尺面目标经综合后被“聚合”为1个较小比例尺面目标。因此,制图综合驱动的差异源于综合操作算子的作用,具体体现在匹配目标对包含的目标数量、几何形状和空间位置等方面,某些综合算子(如Collapse)亦可导致匹配目标对在目标类型、维度方面的差异。

图2 制图综合驱动的差异Fig.2 Discrepancy driven by cartographic generalization
1.1.2 实际变化驱动 如图3所示,图3a和图3c分别为较大比例尺面目标,图3b和图3d分别为与之匹配的较小比例尺面目标。图3b中3号面目标仅与图3a中1号面目标匹配,两者之间形状、大小等几何特征均一致,故该地物未发生变化。而2号面目标则无与之匹配的面目标,其大小近似于1号面目标,可推断不属于制图综合差异,而应为新出现的地物,从而在现势性较弱的较小比例尺地图(图3b)中无对应面目标。4、5号面目标亦是一对匹配目标,两者的形状、大小差异明显,且差异大小超出表达尺度及制图综合所能引起的范围,分析可知该处地物已发生变化。

图3 实际变化驱动的差异Fig.3 Discrepancy driven by real change
由此可见,实际变化驱动的差异由现实世界地物发生实际变化所致,主要体现在匹配目标对中大小、形状和数量等几何特征上,某些情况亦可导致目标对在类型、维度和属性方面的差异。不难看出,制图综合和实际变化都可导致匹配目标出现各种差异,这些差异体现在目标几何特征(如形状、大小、维度等)、语义特性(如属性信息)上。变化探测的主要任务就是区分实际变化驱动的差异和制图综合驱动的差异,进而为判断变化类型提供依据。
1.2 面/面目标变化类型
参照现实世界中地物实际变化情况可知,地物变化类型主要包括:1)出现:原地表不存在某类地物,现在新出现了该类地物,如原本空旷的地表新挖了一个水塘;2)消失:原地表存在某类地物,现在该类地物不再存在,如水塘被填平,成为空地;3)改变:原地表存在某类地物,现在该类地物被另外的地物所替代,如水塘被填平并新建了房屋。对于变化类型“改变”,可将其理解为“消失”和“出现”两种变化的合成,即原有的地物消失后,又出现新地物,且新地物在大小、形状、属性等方面至少有一项不同于原有地物。3种变化类型分别反映了现实世界中地物“从无到有”、“从有到无”和“从某地物(群)到其他地物(群)”的变化过程。
若将上述面状地物视为居民地,则上述3种变化类型分别对应新建(即一片空地上出现一栋新建房屋)、拆除(旧建筑被拆除后不再建新建筑)和改建(将旧房屋拆除后再新建房屋,新建房屋在形状、大小等方面至少有一项有别于旧建筑)。
2 面目标匹配模式与变化类型判别
2.1 面/面目标匹配模式
由于地理要素在不同比例尺地图中的表达形式各异,以及点、线和面3类基本空间目标之间的排列组合,以致匹配目标对的构成包括6种可能情况[18](从较大比例尺到较小比例尺:点与点、线与点、线与线、面与点、面与线和面与面)。本文以面与面匹配目标对为例,探讨其变化探测问题。考虑到匹配目标对各自包含的目标数量差异,面面匹配目标对又分为1∶0、1∶1、0∶1、1∶M、N∶1和 N∶M 共6种匹配模式[19](图4),这些匹配模式不仅反映了不同时段地面目标数目的变化,而且表达了制图综合操作中不同比例尺地图目标之间的对应关系,亦传递了不同类型的变化信息。
2.2 面/面匹配目标对差异度量指标
常用的面目标度量指标包括大小、形状和质心等几何特征,顾及几何参数表达的繁简程度及计算量差异,这里按参数计算量大小依次选取边界长度差、面积差和重叠度3个指标对匹配目标的差异进行度量(考虑到涉及两个以上面目标时,边界长度和面积差异均较大,实际意义不大,故边界长度差和面积差仅用于1∶0、1∶1和0∶1模式),进而对差异驱动因素进行“由简到难”、“由快速到准确”的层次判断。
(1)设匹配面目标对中较大、较小比例尺地图面目标边界周长分别为PN、PO,边界周长差异记为δP,其阈值记为εP,则δP可表达为:

(2)设匹配面目标对中较大、较小比例尺地图面目标面积分别为AN、AO,面积差异记为δA,其阈值记为εA,则δA可表达为:

(3)设匹配面目标对中面目标并集的面积为AU,面目标交集的面积为AI,两面目标重叠度记为δO,重叠度阈值记为εO,则δO可表达为:

鉴于两个面目标匹配的多种模式[19]及不同匹配模式所用判断指标的差异,下面按匹配模式分别探讨面/面匹配目标变化类型判别方法。
2.3 面/面匹配目标变化类型判别
2.3.1 1∶0模式 如图4,现势性强的较大比例尺地图面目标无与之对应的现势性弱的较小比例尺地图面目标,根据式(1)、式(2)和式(3)计算得到边界周长和面积差异均为1,重叠度为0,此模式的匹配面目标之间的差异非常大,但该差异的可能驱动因素包括制图综合和实际变化。假设该面目标的面积为AN,较小比例尺地图所能表达的最小面积为AMin,若AN≤AMin,则该面状地物未发生变化,差异由制图综合驱动(如Selective Elimination);若AN>AMin,则该面状地物已发生变化,差异由实际变化驱动,其变化类型为“出现”。
2.3.2 1∶1模式 1∶1模式的匹配面目标对之间的差异主要体现在形状和大小方面,该差异可能由制图综合(如Simplification、Magnification等算子会使得匹配目标对的形状、大小、边界周长等特征发生差异,而Displacement算子则会使位置等发生差异)或实际变化驱动。因此,此模式的匹配面目标对需选用3种指标进行差异度量,根据式(1)、式(2)和式(3),分别计算边界周长差异、面积差异和重叠度,依次考察匹配对的边界周长差异、面积差异及重叠度是否在阈值范围内:若δP>εP,则认为差异由实际变化驱动,地物已发生变化,变化类型为“改变”;若δP≤εP,且δA>εA,则认为差异由实际变化驱动,地物已发生变化,变化类型为“改变”;若δP≤εP,且δA≤εA,又δO<εO,则认为差异由实际变化驱动,该地物已发生变化,变化类型为“改变”;若δP≤εP,且δA≤εA,又δO≥εO,则认为差异由制图综合驱动,该地物未发生变化,如图5所示。
2.3.3 0∶1模式 0∶1模式匹配目标的差异程度类似于1∶0模式,不同的是现势性较弱的较小比例尺地图面目标无与之对应的现势性较强的较大比例尺地图面目标,根据式(1)、式(2)和式(3)计算得到边界周长和面积差异均为1,重叠度为0,分析可知,该差异由实际变化驱动,即地物已发生变化,变化类型为“消失”。

图5 1∶1模式面/面匹配目标变化层次判断Fig.5 Hierarchical determination of corresponding areas for 1∶1 mode
2.3.4 1∶M、N∶1和N∶M 模式 1∶M 和 N∶M 模式的匹配面目标对在实际生产中很少出现,其差异可能由制图综合或实际变化驱动。N∶1模式的匹配面目标对出现较多,在6种匹配模式中比重最大,其差异的可能驱动因素包括制图综合和实际变化。考虑到涉及多个面目标时,边界周长差异和面积差异的实际意义不大,故1∶M、N∶1和N∶M3种模式的匹配对用“重叠度”指标考察:根据式(3)计算重叠度大小,若δO≥εO,则认为差异由制图综合(如Simplification、Aggregation或 Selective Elimination等算子)驱动,该地物未发生变化;否则认为差异由实际变化驱动,该地物已发生变化,变化类型为“改变”。
3 匹配面目标对变化探测实验及结果分析
3.1 面/面匹配目标对变化探测实验
以两种不同比例尺的居民地数据作为实验对象,如图6a和图6b分别为实验区1∶2 000(现势性较好)和1∶10 000(现势性较差)居民地数据,面目标数分别为732和181。两种比例尺地图中匹配目标对共计550对,包括1∶0模式369对,1∶1模式98对,0∶1模式5对,N∶1模式78对,另两种模式(即1∶M 和N∶M)均为0对。参照相关规范[20,21]规定的图上最小尺寸(即取),并按上述方法分别对各种模式(即分别取)的匹配目标对进行考察得到变化探测结果如表1。从表1中可以看出:1)1∶0模式匹配目标对中共有93个1∶2 000比例尺面目标(图上面积大于等于1mm2)为新出现面目标,即其变化类型为“出现”,另外276个面目标(图上面积小于1mm2)未发生变化,匹配目标间的差异由制图综合驱动;2)1∶1模式匹配目标对中13个面目标已发生变化,其变化类型为“改变”,另外85个面目标未发生变化,匹配目标间的差异由制图综合驱动;3)0∶1模式匹配目标对中的5个面目标均已发生变化,其变化类型为“消失”;4)N∶1模式匹配目标对中的8对面目标已发生变化,变化类型为“改变”,其余70对面目标未发生变化,其差异由制图综合驱动。
3.2 实验结果分析
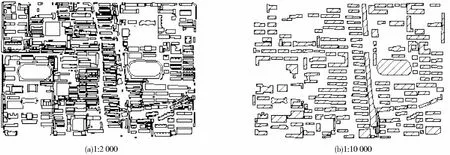
图6 1∶2 000与1∶10 000居民地匹配目标变化探测实验Fig.6 Change detection between corresponding areas from residential maps of 1∶2 000 and 1∶10 000 scales

表1 1∶2 000、1∶10 000比例尺地图面目标匹配对各模式变化类型与频次的统计Table 1 Summary of detecting results between corresponding areas from residential maps of 1∶2 000 and 1∶10 000 scales

表2 1∶2 000、1∶10 000匹配面目标差异度量样本Table 2 Samples of discrepancy measuring between corresponding areas in maps of 1∶2 000 and 1∶10 000 scales
表2为实验结果的部分采样,其中无填充面目标和斜线填充面目标比例尺分别为1∶2 000和1∶10 000,各模式匹配目标对变化探测示例如下:1)1∶0模式:168号目标面积 A168为1 012.735m2,大于AMin(图上1mm2),变化类型为“出现”,即“新建”房屋,166号目标面积A166为16.533m2,小于AMin,未变化;2)1∶1模 式:263号目标对周长差异δP为83.4%,大于εP(15%),变化类型为“改变”,即“改建”房屋,157号目标对周长差异δP为12.4%,小于εP(15%),面积δA差异为3.9%,小于εA(20%),重叠度δO为92.6%,大于εO(75%),未变化;3)0∶1模式:82号面目标变化类型为“消失”,即“拆除”房屋;4)N∶1模式:179号目标对重叠度δO为31.5%,小于εO(75%),变化类型为“改变”,即“改建”房屋,14号目标对重叠度δO为87.5%,大于εO,未变化。
从面/面匹配目标变化探测实验结果看,效果良好,达到了预期目标,能准确、有效地区分不同模式的匹配面目标之间的实际变化差异和制图综合差异。总体而言,上述方法取得了较理想的变化探测结果,但亦存在有待深入研究之处,如实验结果与比例尺跨度和阈值大小的关系,同时,受到某种匹配模式的现实出现概率很小和可获得的有限实验数据的局限,未能获得某种匹配模式的目标对的变化探测结果。
4 结语
目标匹配是实现多尺度地图数据合并、持续更新的关键技术和重要环节之一,其目的是利用已更新的现势性强的较大比例尺地图数据更新现势性弱的较小比例尺地图数据,从而在不同比例尺地图数据间传播变化,实现多尺度地图协同更新[22]。目标匹配技术的应用已深入到地理信息科学领域的空间数据质量改善和评价、多源空间数据集成(或融合)、多尺度空间数据库的维护和更新、基于位置服务的导航等诸多方面[23,24]。本文从空间目标的面积等几何特征出发,对多尺度矢量地图空间目标变化探测问题进行探讨,分析了多尺度地图空间匹配面目标之间的差异产生原因,并将差异驱动因素归纳为制图综合和实际变化两类,明确了变化探测的目的和任务,对多尺度空间面目标的变化类型进行了归纳、分类,提出了针对面面匹配目标的差异驱动因素判别方法和变化探测方法,实验亦证明了该方法的可行性和实用性,为多尺度地图更新提供了技术方法。
[1] 陈军,李志林,蒋捷,等.基础地理数据库的持续更新问题[J].地理信息世界,2004,2(5):1-5.
[2] HEIPKE C.Requirements for modern GIS[A].CHEN J,JIANG J.Proceedings of ISPRS Commission II Symposium[C].2002.173-179.
[3] USGS,2001,http://nationalmap.usgs.gov,2013-05-02.
[4] MURRAY K.Anewgeo-infromation Framework for Great Britain[C].FIG XXII International Congress,2002.
[5] GONG J Y,SUI H G,MA G R,et al.A review of multi-temporal remote sensing data change detection algorithms[A].The International Archives of the Photogrammetry,Remote Sensing and Sensing and Spatial Information Sciences[C].Vol.XXXVII.Part B7.2008.757-762.
[6] TIAN M,WAN S,YUE L.A novel approach for change detection in remote sensing image based on saliency map[A].International Conference on Computer Graphics,Imaging and Visualization[C].2007.397-402.
[7] SONG Y,JIA X X.Remote sensing change detection based on growing hierarchical self-organization map[A].Environmental Science and Information Application Technology(ESIAT)[C].2010.
[8] 杜培军,柳思聪.融合多特征的遥感影像变化检测[J].遥感学报,2012,16(4):663-677.
[9] BADARD T.Towards a generic updating tool for geographic databases[A].GIS/LIS′98[C].1998.352-363.
[10] ANDERS K H,BOBRICH J.MRDB Approach for Automatic Incremental Update[C].ICA Workshop on Generalization and Multiple Representation,2004.
[11] 张保钢,袁燕岩.城市大比例尺地形图数据库中地物变化的自动发现[J].武汉大学学报(信息科学版),2005,30(7):640-642.
[12] 陈军,胡云岗,赵仁亮,等.道路数据缩编更新的自动综合方法研究[J].武汉大学学报(信息科学版),2007,32(11):1022-1027.
[13] 吴建华,傅仲良.数据更新中要素变化检测与匹配方法[J].计算机应用,2008,28(6):1612-1615.
[14] ARMENAKIS C,CYR I.PAPANIKOLAOU E.Change detection methods for the revision of topographic databases[A].Proceedings of the Joint International Symposium on Geospatial Theory,Processing and Applications[C].2002.
[15] 李志林.地理空间数据处理的尺度理论[J].地理信息世界,2005,3(2):1-5.
[16] 艾廷华,成建国.对空间数据多尺度表达有关问题的思考[J].武汉大学学报(信息科学版),2005,30(5):377-382.
[17] LI Z,YAN H,AI T,et al.Automated building generalization based on urban morphology and Gestalt theory[J].International Journal of Geographical Information Science,2004,18(5):513-534.
[18] 徐枫,邓敏,赵彬彬,等.空间目标匹配方法的应用分析[J].地球信息科学学报,2009,11(5):657-663.
[19] 赵彬彬,邓敏,徐震,等.多尺度地图面目标匹配的统一规则研究[J].武汉大学学报(信息科学版),2011,36(8),991-994.
[20] 中华人民共和国国家质量监督检验检疫总局.GB/T 20257.2—2006.国家基本比例尺地形图图式第2部分:1∶5 000 1∶10 000地形图图式[S].北京:中国标准出版社,2006.
[21] 中华人民共和国国家质量监督检验检疫总局、中国国家标准化管理委员会.GB/T 12343.1—2008.国家基本比例尺地图编绘规范第1部分:1∶25 000 1∶50 000 1∶100 000地形图编绘规范[S].北京:中国标准出版社,2008.
[22] 赵彬彬.多尺度矢量地图空间目标匹配方法及其应用研究[D].中南大学,2011.
[23] 田原,蔡华,邬伦,等.基于局部相似的地籍宗地图斑匹配方法[J].地理与地理信息科学,2011,27(5):25-28.
[24] 吴建华.顾及环境相似的多特征组合实体匹配方法[J].地理与地理信息科学,2010,26(4):1-6.