基于相关特性的改进G-SVSLMS算法*
2013-08-08路翠华李国林奚晓梁
路翠华,李国林,谢 鑫,奚晓梁
(海军航空工程学院7系,山东烟台 264001)
1 引言
最小均方(LMS)算法计算复杂度低,结构简单,得到了广泛的应用。但它的收敛速度慢,收敛速度与自适应步长和失调之间存在着矛盾。针对这个问题,研究人员先后提出了变步长 LMS 算法[1-3]、LMS牛顿算法[4]、归一化 LMS 算法[5]、变换域及分块LMS 算法[6-8]、截断数据 LMS算法以及最小高阶误差(LMK)算法等[9-10]。目前,LMS 算法已比较成熟,但是结合实际应用可以开展提高其性能的改进算法研究。G-SVSLMS算法是目前比较经典的一种变步长LMS算法,但其步长更新公式易受噪声干扰影响。文献[11]提出基于零均值特性的改进G-SVSLMS算法,提高了G-SVSLMS算法抗零均值白噪声干扰的能力。但高斯白噪声并不都是零均值的,而高斯白噪声的相关性都比较差,本文根据这一特性,提出基于相关特性的改进G-SVSLMS算法,提高了G-SVSLMS算法抗高斯白噪声干扰的能力。
2 G-SVSLMS算法分析
文献[1]提出的G-SVSLMS算法如下:
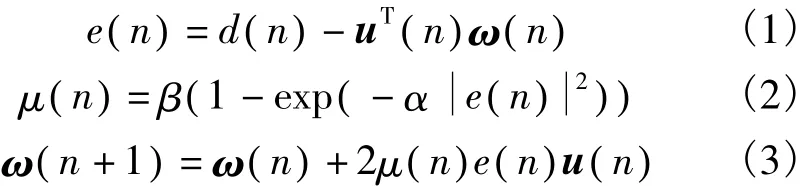
式(2)中,参数α>0控制函数的形状,参数β>0控制函数的取值范围,μ(n)与α、β和e( n)的关系如图1所示。当α、β选定时,μ(n)由e( n)唯一确定。
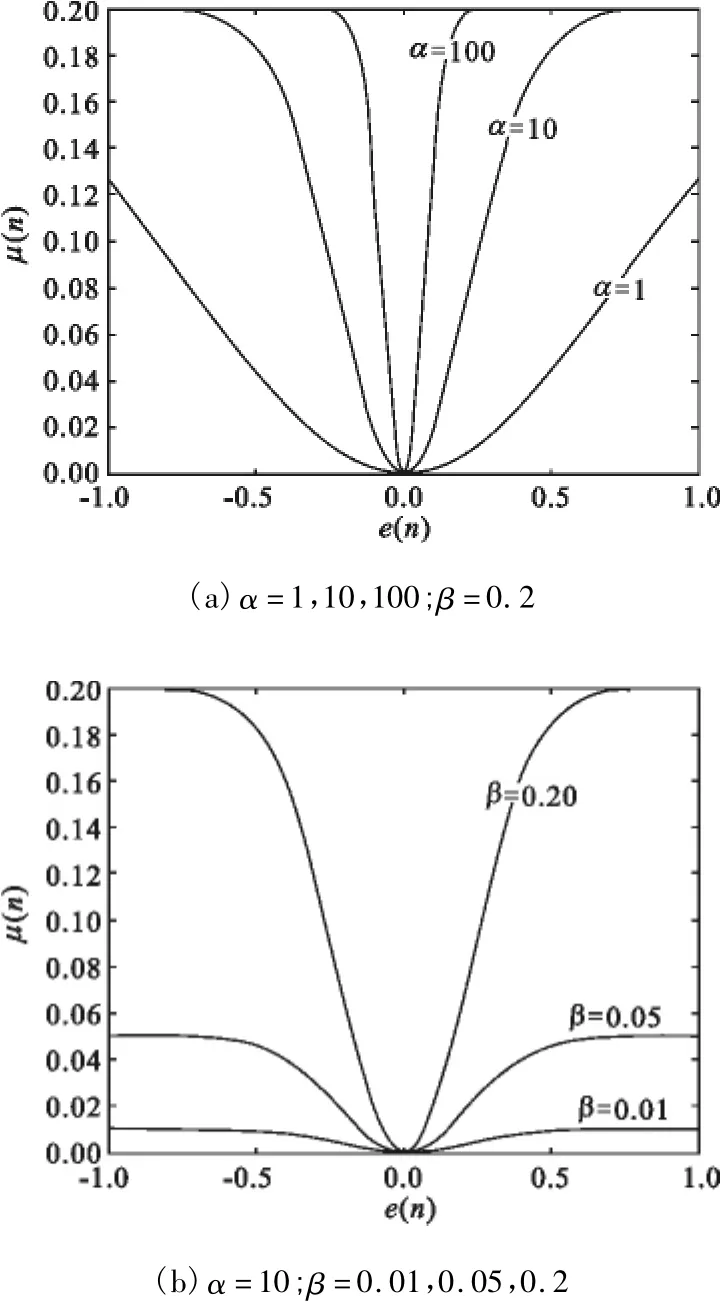
图1 μ(n)与e(n)的关系曲线Fig.1 Curves of μ(n)vs e(n)
G-SVSLMS算法具有较快的收敛速度和较小的稳态误差,但在噪声干扰比较严重的环境中,步长更新公式中的e( n)受噪声的影响,使μ(n)不能达到一个很小的值,从而使自适应算法很难达到最优解,只能在最优解附近波动。
3 基于相关特性的G-SVSLMS算法
高斯白噪声 v的相关性比较差(即E[ v( n) v( n-1 )]=0),根据这一特性提出基于相关特性的G-SVSLMS算法,其步长更新公式为

基于相关特性G-SVSLMS算法的步长更新公式相对于G-SVSLMS算法具有较强的抗噪声干扰能力。若两算法选取相同参数α、β,则基于相关特性的G-SVSLMS算法相对于G-SVSLMS算法具有小的稳态误差。
证明如下:
设误差e( n)=s1(n)+v1(n),其中s1(n)为误差中的信号分量,v1(n)为误差中的噪声分量,则

若信号与噪声不相关,则

所以基于相关特性G-SVSLMS算法中的步长更新公式受噪声影响很少,具有很强的抗噪声干扰能力。
当算法趋向收敛时,s1(n)→0,所以

则通常情况下,

设G-SVSLMS算法步长为μ(n),基于相关特性的G-SVSLMS算法步长为μ1(n),若两算法选取相同参数 α、β,由式(2)、(4)、(8)可得

所以此时基于相关特性的G-SVSLMS算法相对于G-SVSLMS算法具有小的稳态误差。
证毕。
在保证算法收敛的条件下,若基于相关特性的G-SVSLMS算法和G-SVSLMS算法参数α相同,基于相关特性的G-SVSLMS算法可以选取相对较大的参数β,从而使基于相关特性的G-SVSLMS算法相对G-SVSLMS算法具有较快的收敛速度。
证明如下:
设G-SVSLMS算法的参数为 α、β,步长为μ(n),基于相关特性的G-SVSLMS算法的参数为α1、β1,步长为 μ1(n),输入信号矢量 u(n)相关矩阵为R=E[ u(n) uH(n )],R的最大特征值为 λmax。
由LMS算法均值收敛条件可得,要使G-SVSLMS算法和基于相关特性的G-SVSLMS算法收敛,须使
即须使

式中,emax(n)为滤波过程中绝对值最大的误差值。显然

若 α=α1,由式(14)可得,满足式(13)的 β1可大于满足式(12)的β,即若基于相关特性的GSVSLMS算法和G-SVSLMS算法参数α相同,基于相关特性的G-SVSLMS算法可以选取相对较大的参数β1,所以基于相关特性的G-SVSLMS算法相对G-SVSLMS算法具有较快的收敛速度。
证毕。
4 仿真分析
下面将基于相关特性的G-SVSLMS算法和G-SVSLMS算法应用到窄带信号的噪声抑制中,通过仿真验证基于相关特性G-SVSLMS算法的滤波性能。噪声抑制原理如图2所示。
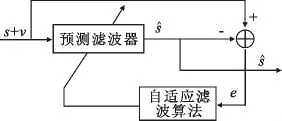
图2 噪声抑制原理Fig.2 Principle of noise suppression
当窄带信号中含有噪声时,由于窄带信号是可预测的,而高斯白噪声的可预测性比较差,可利用其预测性的差异进行噪声抑制。设含有噪声的信号为x,x=s+v,其中s为有用信号,v为噪声。因为s为窄带信号,利用预测滤波器可得到信号s的预测信号^s。误差e=s+v-^s,根据误差e调整滤波器的权值,使^s→s,从而使e→v,达到噪声干扰抑制的目的。
仿真中选取窄带信号为弹目距离大于3倍脱靶量时连续波多普勒无线电引信回波信号。因仿真中只选取了一小段回波信号,可假设在这一小段时间内回波信号的幅度是不变的。在仿真中,信号s是已知的,用平方误差来衡量滤波性能。为有效评价算法性能,选取近似于真实环境的仿真环境,具体如下:设弹目相对运动速度为1 000 m/s,脱靶量为20 m,引信在弹目距离300 m时开始工作。引信回波信号SNR=10 dB时,基于相关特性的GSVSLMS算法和G-SVSLMS算法中参数α=10、β=0.1时,其平方误差曲线如图3所示,收敛曲线如图4所示。
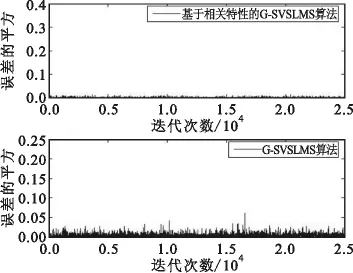
图3 SNR=10 dB、参数相等时平方误差曲线Fig.3 Square error curve when SNR=10 dB and the parameters of two algorithms are equal
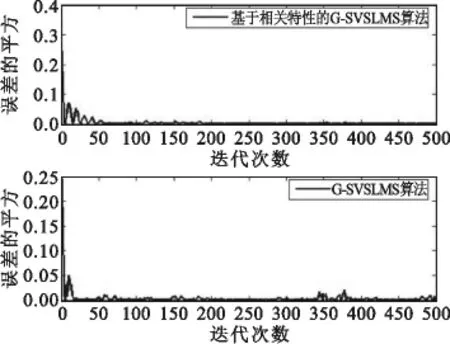
图4 SNR=10 dB、参数相等时收敛曲线Fig.4 Convergent curve when SNR=10 dB and the parameters of two algorithms are equal
由图3和图4可以看出,基于相关特性的改进G-SVSLMS算法和G-SVSLMS算法参数相同时,基于相关特性的改进G-SVSLMS算法收敛速度略慢于G-SVSLMS算法,但其收敛后的稳态误差明显小于G-SVSLMS算法的稳态误差,与理论分析一致。
G-SVSLMS算法中参数 α=10、β=0.01时与基于相关特性的G-SVSLMS算法参数α=10、β=0.1时的稳态误差基本相等,其平方误差曲线如图5所示。
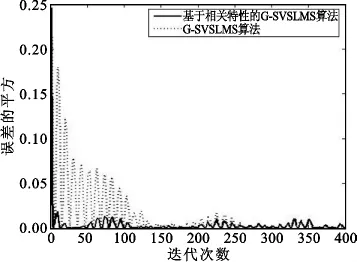
图5 SNR=10 dB、稳态误差相等时平方误差曲线Fig.5 Square error curve when SNR=10 dB and the steady-state errors of two algorithms are equal
由图5可以看出,在保证两种算法收敛后稳态误差基本相等条件下,因基于相关特性的改进GSVSLMS算法可选用较大的参数β,其收敛速度明显快于G-SVSLMS算法,与理论分析一致。
5 结束语
G-SVSLMS算法步长更新公式易受噪声干扰,导致自适应滤波器权值在最优权值附近波动比较大。本文针对这一问题,根据高斯白噪声相关性比较差的特性,对G-SVSLMS算法进行改进,提出了基于相关特性的改进G-SVSLMS算法,使算法抗噪声干扰能力增强。文献[11]提出的基于零均值的改进G-SVSLMS算法只能抵抗零均值高斯白噪声的干扰,而本文提出的算法能抵抗所有高斯白噪声的干扰,但算法抗噪声调幅和噪声调频干扰的性能有待于进一步分析。
[1] 高鹰,谢胜利.一种变步长LMS自适应滤波算法及分析[J].电子学报,2001,29(8):1094-1097.GAO Ying,XIE Sheng - li.A Variable Step Size LMS A-daptive Filtering Algorithm and Its Analysis[J].Acta Electronica Sinica,2001,29(8):1094-1097.(in Chinese)
[2] 周学文,柯熙政.一种新的变步长LMS自适应滤波算法[J].西安理工大学学报,2006,22(3):290-293.ZHOU Xue- wen,KE Xi- zheng.A New Variable Step Size LMS Adaptive Filtering Algorithm[J].Journal of Xi'an University of Technology,2006,22(3):290 -293.(in Chinese)
[3] Zheng Fanfan,Huang Lianfen,Shi Zhiyuan,et al.Variable Step-size LMS Adaptive Algorithm Based on Computational Verb Rules[C]//Proceedings of 2010 International Conference on Anti-Counterfeiting Security and I-dentification in Communication.Chengdu:IEEE,2010:343-346.
[4] Bhotto M Z A,Antoniou A.Improved data - selective LMS-Newton adaption algorithms[C]//Proceedings of the 16th Inernational Conference on Digital Signal Processing.Santorini- Hellas:IEEE,2009:1 -6.
[5] Jimaa S A,Al-Simiri A,Shubair R M,et al.Convergence evaluation of variable step-size NLMS algorithm in adaptive channel equalization[C]//Proceedings of 2009 IEEE International Symposium on Signal Processing and Information Technology.Ajman:IEEE,2009:145 -150.
[6] Qi Lin,Zhang Yanhong,Tao Ran,et al.Adaptive filtering in fractional Fourier domain[C]//Proceedings of 2005 IEEE International Symposium on Microwave,Antenna,Propagation and EMC Technologies for Wireless Communications.Beijing:IEEE,2005:1033 -1036.
[7] 齐林,周丽晓.变换域自适应滤波算法的研究[J].郑州大学学报(理学版),2007,39(1):61-66.QI Lin,ZHOU Li-xiao.Study on Transform -domain A-daptive Filtering Algorithm[J].Journal of Zhengzhou U-niversity,2007,39(1):61-66.(in Chinese)
[8] Narasimha M J.Block Adaptive Filter With Time-Domain Update Using Three Transforms[J].IEEE Signal Processing Letters,2007,14(1):51 -53.
[9] Haykin S.自适应滤波器原理[M].4版.郑宝玉.北京:电子工业出版社,2006.Haykin S.Adaptive Filter Theory[M].4th ed.Translated by ZHENG Bao- yu.Beijing:Publishing House of E-lectronics Industry,2006.(in Chinese)
[10] Lu Cui- hua,Li Guo - lin,Wang Dong - mei.Antinoise Based on Improved Variable Step Size LMS Adaptive Filtering Algorithm[C]//Proceedings of 2010 International Symposium on Image Analysis&Signal Processing.Taipei:IEEE,2010:82 -84.
[11] 路翠华,谢鑫,周红梅.基于零均值特性的改进GSVSLMS算法[J].电讯技术,2013,53(3):284 -287.LU Cui- hua,XIE Xin,ZHOU Hong - mei.Improved G-SVSLMS Algorithm Based on Zero Mean Characteristics[J].Telecommunication Engineering,2013,53(3):284 -287.(in Chinese)