工业机器人辅助数控精密木雕加工中心研究
2013-08-07苗新刚
郑 娇,汪 苏,苗新刚
(北京建筑工程学院 北京市建筑安全监测工程技术研究中心,北京 100044)
0 引言
近几年雕刻艺术越来越受到人们的关注。传统的手工雕刻方法对工匠技术水平的要求极高,而且还具有时间周期长、效率低等特点,远远不能满足现在人们的需求。机器人辅助数控精密木雕加系统,在数控雕刻加工系统的基础上,加入机器人设计,能够完成较为复杂的加工工艺。它具有数据采集、处理、加工路径生成、雕刻一体化的设计,大大的提高了雕刻精度及生产效率。
1 系统总体设计
工业机器人辅助数控精密木雕加工系统是一项基于设计、开发、数据采集处理、数据输出与加工等多项工作为一体的研究系统。本系统可以实现平面浮雕、镂空雕刻、空间立体雕刻等多种功能。
1.1 系统结构及工作流程
系统主要包括图像采集、数据处理子系统、控制子系统、数据输出与加工子系统等四个部分。
系统通过3D 扫描仪、Artcam 等一系列软件进行图像采集、处理。生成模型,经过处理最终生成控制系统所识别的NC 代码。控制系统通过PC 机完成NC 代码的读取、加工路径的仿真、及代码的输出,控制机床进行加工处理。加工过程通过机床来完成,机床根据接收到的指令,选择不同的工作方式,最终完成浮雕、立体雕刻任务。系统工作流程如图1所示。
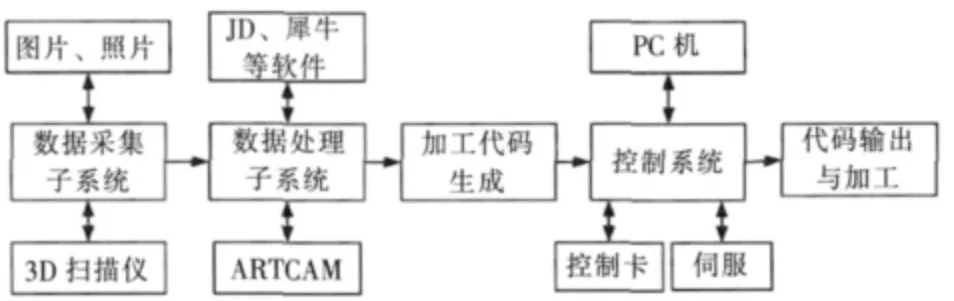
图1 系统工作流程图
工业机器人辅助数控精密木雕加工中心是综合多种雕刻功能为一体的雕刻系统。所以在图像采集处理上需要采用不同的软件进行处理。系统采用3D 扫描仪、Artcam、JD、犀牛等多种软件进行模型扫描、建模、路径仿真及加工代码生成。控制系统包括PC 机、控制卡及伺服,主要对路径进行仿真和控制机床进行加工处理。
1.2 数控雕刻加工中心
雕刻机采用四轴空间结构,分别为X、Y、Z 轴,另外在立体雕刻空间还有一旋转台,转轴为A 轴。旋转轴A 轴的主要作用是完成立体加工,在进行立体雕刻时,旋转轴根据程序的设定,进行360°旋转或是进行翻转完成立体雕刻。旋转台的设计,是雕刻机完成立体雕刻的关键。雕刻机外形需采用真空吸附式平台,Y 轴龙门式移动,工业辅助机器人安装在龙门架上,雕刻机头安装在机器人末端轴上,通过龙门架和机器人的协调动作来完成各种复杂的雕刻任务。如图2所示。
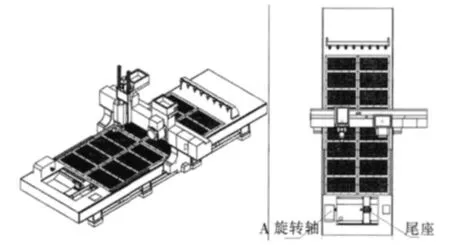
图2 数控木雕机结构图
1.3 机器人介绍
系统采用MOTOMAN-MH50 型机器人,该机器人为垂直多关节形结构,机器人按关节分为S 轴、L 轴、Y轴、R 轴、B 轴、和T 轴,这种结构具有动作灵活、工作空间大、干涉小等特点,适合完成复杂结构雕刻的任务。机器人通过按动示教编程器上的轴操作键,可以实现机器人在关节坐标系中每个轴所需的动作。如图3所示。
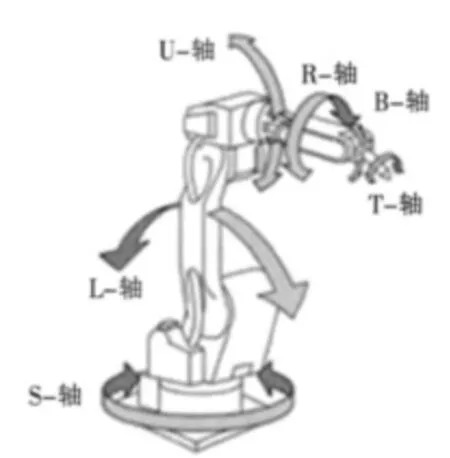
图3 关节动作示意图
1.4 机器人辅助作用及工作流程
对于一些复杂结构的立体雕刻,仅依靠旋转轴的辅助作用,是无法达到目的的。在这种情况下,就需要增加机器人的设计,利用机器人可以进行多角度加工的特点,去雕刻这种复杂结构。
机器人与雕刻机之间通过I/O 来交互信息。当雕刻机完成工作时,向机器人发送指令,机器人接收到指令,同时向雕刻机发出 “信息已接收” 指令,这时雕刻机离开工作位置,机器人移动到工作位置,机器人开始进行雕刻;当机器人完成雕刻任务之后,同样向雕刻机发出指令,雕刻机接收到指令之后向机器人发出 “信息已接收” 指令,这时机器人离开工作位置,由雕刻机继续工作。机器人与雕刻机之间的信息传递如图4所示。
机器人工作方式:机器人采用离线编程方式,这种工作方式比传统的示教编程方法更快、个有效。系统采用Powermill 机器人模块,完成机器人语言的编程。工作流程如图5所示。
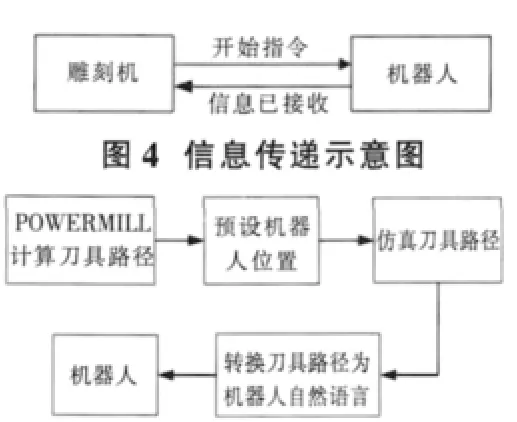
图5 机器人工作流程图
2 成品展示
该系统经过多次试验与调试,现在已经可以进行正常工作,并可以加工各种成品。其中包括浮雕、立体雕刻成品。图6 为该中心的加工成品。

图6 浮雕、圆雕成品图
3 结论
论文介绍了工业机器人辅助数控精密木雕加工系统的工作过程,以及各个子系统之间的复杂关系;系统加入机器人设计,为完成复杂结构工艺雕刻提供平台。系统相比于普通数控雕刻加工系统的优势在于对于复杂结构工艺的加工。
[1]恽志东.基于Mastercam X Art 的浮雕设计与数控加工[J].工具技术,2009,42.
[2]Angeles J.,宋伟刚(译).机器人机械系统原理[M].北京:机械工业出版社,2004.
[3]金振林.新型六自由度正交并联机器人设计理论与应用技术研究[D].燕山大学,2002.
