一种基于转矩角的永磁同步电机直接转矩控制
2013-08-07黄文新杨建飞卜飞飞
邱 鑫 黄文新 杨建飞 卜飞飞
(南京航空航天大学江苏省新能源发电与电能变换重点实验室 南京 210016)
1 引言
为了缓解传统内燃机汽车等交通工具对化石能源的消耗,以及造成的环境污染,我国正大力推广和发展电动车[1],以促进“节能减排”。
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)由于具有较高的功率密度和效率,在电动车辆,特别是受电池容量限制的中小型电动汽车中得到广泛应用[2-4]。永磁同步电机根据转子结构的不同可分为隐极式和凸极式两种,后者由于磁路的特点和磁阻转矩的存在,相比前者具有更佳的弱磁能力及更高的转矩电流比[5],因而更适用于电动车驱动。但是凸极式永磁同步电机由于等效气隙较小,交直轴电感参数随负载电流变化显著[6],对控制算法要求较高。
与常规调速系统不同,电动车用驱动多采用转矩控制模式。常规矢量控制对电机交直轴电流进行控制,具有概念清晰、特性稳定的优点,但它对电机转矩是间接控制,其中电感参数的变化使得转矩反馈偏离实际值,导致控制精度下降,甚至失控。因此,矢量控制应用于该场合时,必须获得较精确的电机电感参数,常见方法主要有离线测定法[7]和在线观测法[8,9]。但这些方法通常实现或计算较为复杂,在实际场合应用受限。
直接转矩控制(Direct Torque Control,DTC)与矢量控制不同,DTC将转矩作为直接控制对象,它对电感等参数不敏感,具有较强的鲁棒性[10-17]。为克服传统 DTC中滞环控制所带来的转矩脉动大和开关频率不恒定的缺点[12],引入空间矢量调制(Space Vector Modulation,SVM)。如文献[13]提出一种基于 PI调节器和空间矢量调制的改进 DTC,文献[17]提出的一种通过计算得到电压矢量幅值和角度的SVM DTC,但上述方法中,SVM所需的电压矢量一般通过磁链差实时估算得到,其计算较为复杂。
本文首先分析了永磁同步电机转矩、转矩角和磁链之间关系,推导并得到转矩角和磁链的限幅范围,在此基础上,提出了一种基于电机转矩角的直接转矩控制策略。该方法由转矩闭环直接得到参考电压矢量幅值,由定子磁链闭环和转矩角前馈得到电压矢量的方向,并通过空间矢量调制得到驱动信号。该方法对转矩角实时观测并限制,保证电机稳定运行,不仅具有对电感参数变化不敏感的优点,而且结构简单。
2 基本原理
2.1 转矩方程
转矩是电机控制的核心[10-11]。从 DTC角度出发,永磁同步电机电磁转矩可表示为[5]

式中 p——电机极对数;
ψs,ψf—— 定转子磁链;
Lq,Ld—— 交直轴电感(不失一般性,以凸极电机为例,Lq>Ld);
δ —— 定转子磁链夹角,即转矩角。
如图 1所示,根据式(1)绘制 Te随δ 和ψs变化波形(以正转矩为例),其中
由图1可见,电磁转矩随转矩角变化,控制转矩角即能有效控制输出转矩。但磁链与转矩角必须控制在合适区间,以保证转矩单调变化。
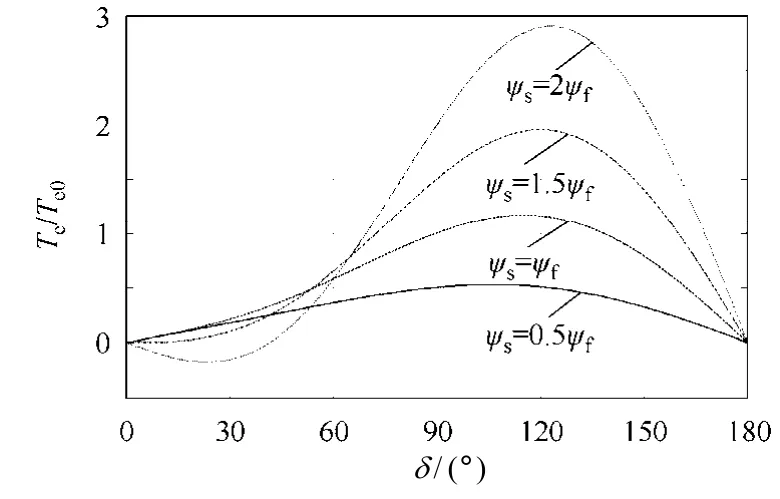
图1 PMSM转矩特性Fig.1 Torque characteristic of PMSM
2.2 转矩角与磁链的限制
文献[16]在分析PMSM DTC弱磁运行时,得到保证电机输出单调稳定的电磁转矩必须满足
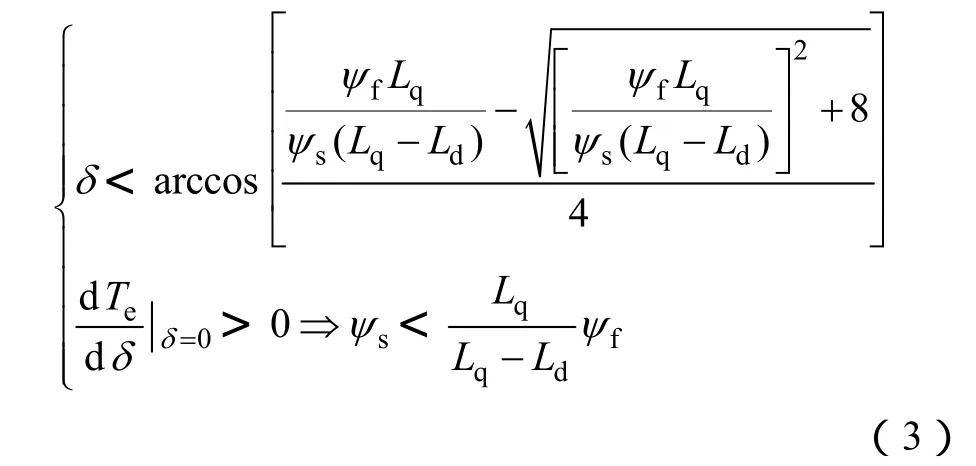
本文在此基础上,进一步考虑电流限幅和实际电机最大去磁能力,并引入电流和电压限制,得到
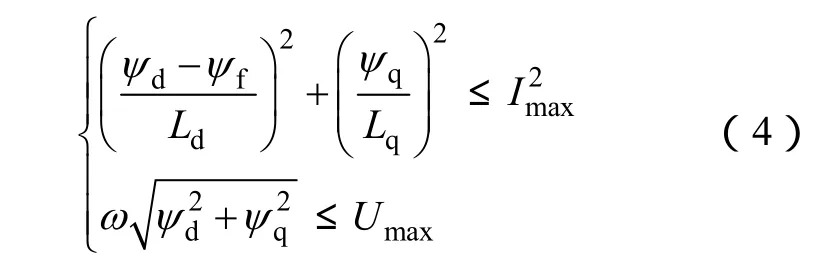
式中 ψd,ψq——定子磁链在d、q轴上分量;
ω——电角速度;
Imax,Umax——电流和电压限幅值。
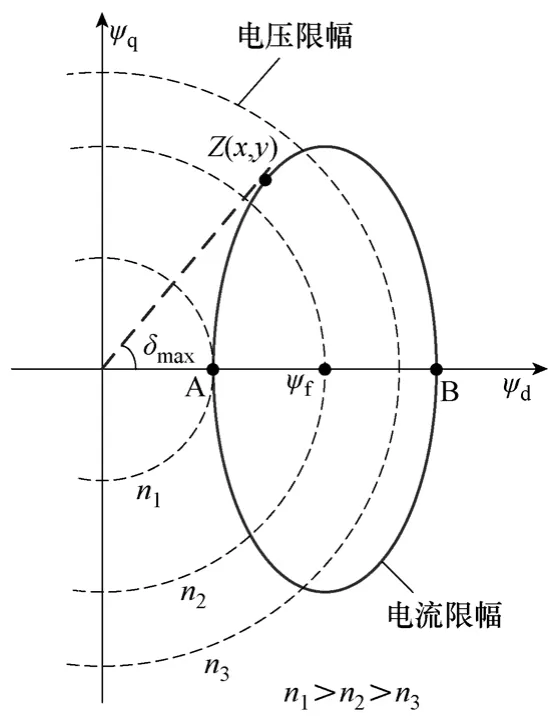
图2 DTC稳定运行区间Fig.2 Stable operation region of DTC
将式(4)以图2表示,图中A点(ψf-ImaxLd,0)表示电机最大弱磁能力,B点(ψf+ImaxLd,0)表示电机最大增磁能力。由于钕铁硼等常规永磁材料仍有不可逆退磁的风险,通常电机设计时需满足ψf>ImaxLd。此时电流限制椭圆无法越过零点,因而转矩角δ <90°,电机工作点不会出现在图1中δ >90°时转矩下降区域。
由原点向电流椭圆作切线得到 Z(x,y) 点,得到电机最大转矩角δmax,计算得到其坐标
因此,为保证电机安全稳定运行,转矩角δ 不应大于δmax。
根据式(1),令 dTe/(dψs)=0,可得到δ 不变时,输出最大电磁转矩时的磁链给定为

3 基于转矩角的DTC控制策略

图3 基于转矩角的DTC控制原理矢量图Fig.3 Vector diagram of DTC control strategy based on torque angle
根据上文分析,转矩角δ 与电磁转矩Te存在对应关系。如图 3所示,在α-β坐标系下进行分析,若希望改变原有转矩角δ0至,电压矢量 u、u′、u″(均大于反电势)均能满足要求,但对磁链幅值的影响各不相同,其中u保持定子磁链幅值不变,u′兼顾减小定子磁链幅值,u″兼顾增加定子磁链幅值。因此,以不同角度发出电压矢量时,既可直接调节转矩角从而改变转矩,还可兼顾调节磁链幅值。
假设电压矢量幅值不变,调节电压矢量角度偏离磁链垂直方向时,投影到磁链垂直方向的电压矢量分量减少,进而导致瞬时转矩角减小,但当所发出电压矢量与当前磁链近似垂直时,根据三角函数,磁链垂直方向的电压矢量分量变化很小。因此,电压矢量的角度对转矩角的影响远小于它的幅值对转矩角的影响,从而实现转矩角和磁链幅值,即转矩和磁链的近似解耦控制。此外,虽然DTC是一种本质上的无位置控制方法[11],但为了保证电机低速及堵转能力,在电动汽车等应用场合还需结合位置传感器或无位置算法。
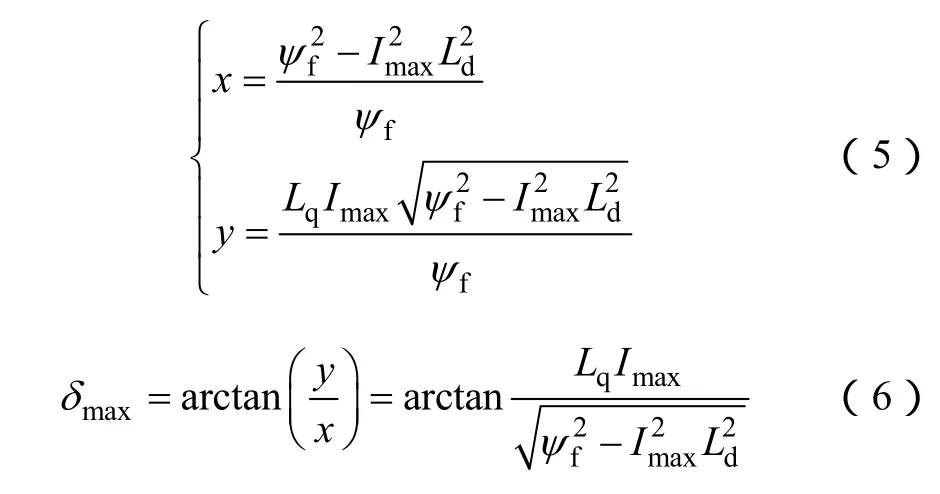
由上文分析,得到一种基于转矩角的DTC控制策略,如图4所示,包括①永磁同步电机;②信号处理单元,对电机状态信号调理;③功率模块;④空间矢量调制单元;⑤电机变量处理单元,包括磁链、转矩、功角等参量计算;⑥极坐标变换单元;⑦⑧分别为转矩和磁链PI调节器。
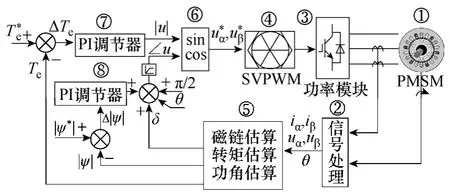
图4 基于转矩角的DTC控制策略总体框图Fig.4 General block diagram of DTC control strategy based on torque angle
在该控制策略中,转矩闭环PI调节直接得到电压矢量幅值;定子磁链幅值闭环PI调节得到电压矢量角度变化量,再结合实时观测转矩角和转子位置得到电压矢量方向;综合得到静止坐标系α、β轴上电压分量,再经空间矢量调制得到驱动信号。
3.1 转矩环
转矩环离散表示为

式中,Kp与Ki分别为比例和积分系数。
输出电压限幅值由当前母线电压值确定,避免了图5所示常规电压矢量按坐标轴分别调制时,幅值大于最大电压这种不可控状态的出现。

图5 电压矢量调节区域示意图Fig.5 Regulatory region of voltage vector
3.2 磁链环
磁链环离散表示为

式中 δ ——估算转矩角;
θ——转子位置。
若电压矢量角度变化较大,会引起明显的转矩脉动,因此在保证磁链调节能力和对系统误差容忍能力的同时,磁链PI调节器输出限幅越小越好,根据实验结果,综合设定PI调节器限幅为±5°,并结合式(6)中转矩角限幅综合得到电压矢量角度。
在恒转矩区,给定磁链一般等于转子磁链;在弱磁区,为保证电机稳定运行,磁链幅值给定由当前母线电压Udc和电机实际电角速度ωe决定

式中 h——电压裕量系数,范围一般取 0.8~0.95之间,以保证弱磁区转矩可调。
3.3 转矩角
在DTC中,定子磁链由反电势积分得到,但是为了防止扰动量造成的直流偏移,一般采用一阶低通滤波器,即

式中 Δeα,Δeβ——反电动势扰动量;
Δψα,Δψβ——磁链扰动量;
ωc——截止角频率。
由于α、β轴不解耦,如电阻变化等因素造成的扰动量在α、β轴上均匀体现,经过滤波器后,扰动量造成磁链等比例变化。而转矩角由

得到,虽然磁链幅值受扰动量影响较大,但转矩角受扰动量的影响较小。
4 实验研究
为验证所述控制策略的正确性,搭建了一套拖动实验平台,如图6所示。其中,实验样机为一台凸极式永磁同步电机,其额定功率为1kW,额定转矩为10Nm,极对数为3,最大电流Imax=20A,永磁磁链ψf=0.3Wb;拖动电机为一台由变频器驱动的5.5kW异步电机。为模拟电动车运行,将拖动电机运行于转速控制模式,实验样机运行于转矩控制模式。

图6 拖动实验平台Fig.6 Dragged experiment platform
样机控制器使用Freescale DSP 56F8346作为控制核心。利用该DSP内部存储空间,并结合自带软件 Freemaster,通过串口通信输出并观测转矩、电流和转矩角等实时变量。
4.1 稳态性能
为验证所提策略的稳态性能,使用变频器控制拖动电机运行在1000r/min,将样机给定转矩设定为10Nm。图7给出相应的转速、电磁转矩、相电流和转矩角波形。
由图7可知,稳态运行时,电磁转矩随转矩角小幅波动,范围约±0.75Nm;相电流正弦度较好;转矩角约47°,小于最大转矩角(约74°)。在额定转速下,系统能输出额定转矩,且运行稳定。
在电动车等转矩控制场合,转矩精度是衡量控制性能的重要指标。使用变频器控制拖动电机分别运行在不同转速(0~1000r/min),将样机给定转矩分别设定为 2.5Nm、5Nm、7.5Nm、10Nm,以此测量不同转速和不同给定转矩下的转矩精度。

图7 转速1000 r/min,给定转矩10Nm时稳态实验波形Fig.7 Steady state experiment waveforms when speed is 1000r/min and given torque is 10Nm
图8给出的是实际输出转矩与给定转矩之比,其中实际输出转矩由转矩传感器测得。从实验结果可以看出,在不同转矩给定和不同转速下,样机的转矩误差均在5%以内,在半载以上时,转矩精度可达2%,说明该控制策略具有较好的转矩精度。
图8 不同速度和给定转矩下的转矩精度Fig.8 Torque accuracy of different speeds and given torques
4.2 动态性能
为验证所提策略的动态性能,使用变频器控制拖动电机运行在 1000r/min,实验样机突加和突卸额定转矩10Nm。图9和图10分别给出对应的电磁转矩、相电流和转矩角波形。

图9 1000r/min下突加10Nm额定负载实验波形Fig.9 Experiment waveforms of loading 10Nm suddenly at 1000r/min

图10 1000 r/min下突卸10Nm额定负载实验波形Fig.10 Experiment waveforms of unloading 10Nm suddenly at 1000r/min
由实验波形可知,当转矩角增大或减小时,反馈转矩同时增加或减少,而且响应时间基本相同,说明转矩与转矩角的一致性。
样机突加额定转矩时,反馈转矩响应时间约6ms;突卸额定转矩时,反馈转矩响应时间约5ms,说明转矩响应较快。
4.3 堵转及起动实验
在电动车等转矩控制场合,电机需要在如堵转和“坡起”等工况下运行。因此,为测试所提控制策略的堵转能力,将实验样机连接至一台磁粉测功机(MAGTROL公司,型号 2PB115—IS),组成如图11所示堵转启动实验平台。
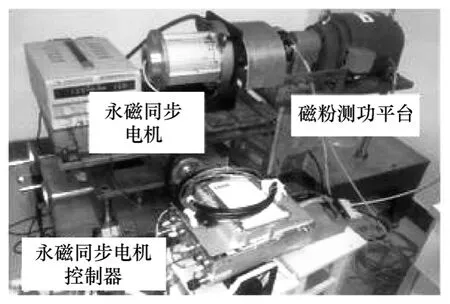
图11 堵转和起动实验平台Fig.11 Experimental platform for locking and starting test
实验时,将速度环加入原有控制策略,输出电磁转矩限幅为14Nm,速度给定为375r/min。首先,电机空载运行;在 9s时,设定磁粉测功机负载为15Nm,此时样机输出转矩限制在14Nm并减速至静止;在 15.5s时,控制测功机负载转矩由 15Nm变化至10Nm,电机起动升速至给定转速并稳定运行。图12给出相应的转速、转矩及电流响应波形。
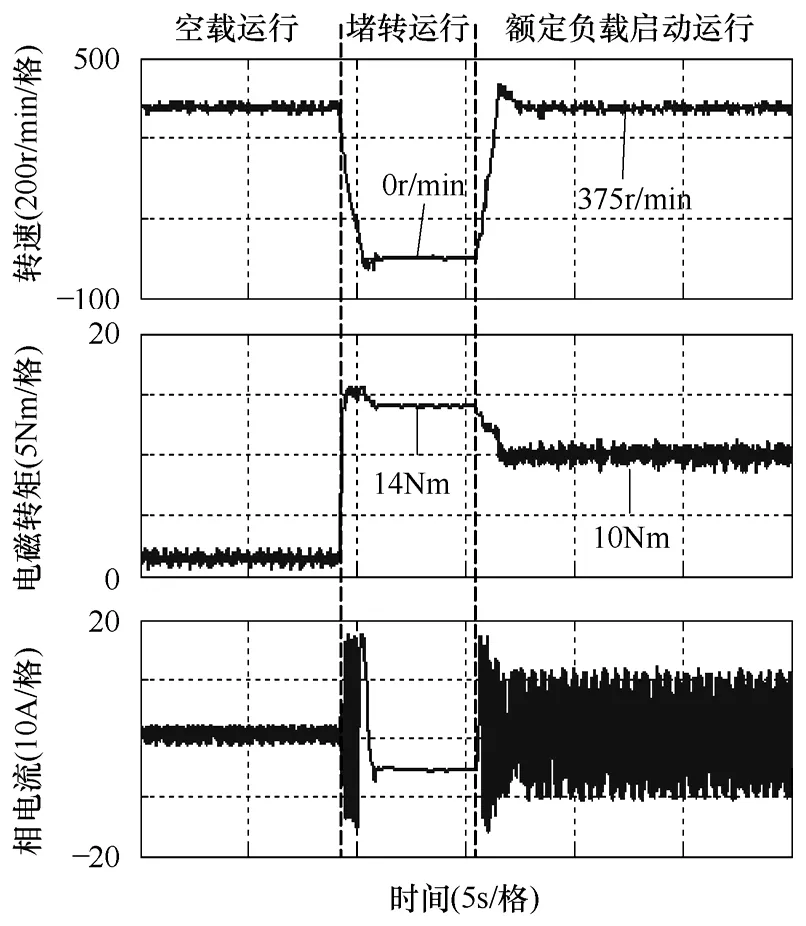
图12 堵转及启动时转速、转矩及电流响应波形Fig.12 Speed, torque and current waveforms of blocking and starting actions
由图12可知,在电机静止时,能够持续稳定的输出最大转矩,具有在堵转时正常工作的能力;在负载减小后,样机能够迅速启动,说明具有良好的带载启动性能。
5 结论
本文首先分析了永磁同步电机转矩和转矩角的关系,并在此基础上提出一种基于电机转矩角的直接转矩控制策略。该方法通过转矩闭环直接得到参考电压矢量的幅值;通过定子磁链幅值闭环得到参考电压矢量变化角度,综合转矩角前馈发出所需电压矢量,并实时观测并限制转矩角,保证电机稳定运行。实验表明,所提控制策略在额定负载稳态运行时,样机电磁转矩脉动约±0.75Nm;在变速变转矩运行时,样机转矩精度在 5%以内;在动态运行时,突加和突卸额定负载,样机响应时间均在 6ms以内;在堵转运行时,样机能够持续稳定的输出限幅转矩,并具有良好的带载启动能力。实验结果证明该策略有效、可行,并具有较好的动静态性能和堵转启动能力,较适合电动车等转矩控制性能要求较高的应用场合。
[1]节能与新能源汽车发展规划(2011年-2020年)[R].
[2]Chan C C, Chan K T.An advanced permanent magnet motor drive system for battery-powered electric vehicles[J].IEEE Trans.on Vehicular Technology,1996, 45(1): 180-188.
[3]Jung W P, Dae H K, Jong M K, et al.Improvement of control characteristics of interior permanent-magnet synchronous motor for electric vehicle[J].IEEE Transactions on Industry Applications,2001, 6(37):1754-1760.
[4]许家群, 朱建光, 邢伟, 等.电动汽车驱动用永磁同步电动机系统效率优化控制研究[J].电工技术学报,2004, 19(7): 81-89.Xu Jiaqun, Zhu Jianguang, Xing Wei, et al.Study of efficiency optimization control of permanent magnet synchronous motor drives for electric vehicle[J].Transactions of China Electrotechnical Society,2004,19(7): 81-89.
[5]唐任远, 等.现代永磁电机理论与设计[M].北京:机械工业出版社, 1997.
[6]赵莉, 郭秋鉴, 等.内嵌式永磁同步电动机电感参数辨识[J].微电机,2008, 41(10): 35-38.Zhao Li, Guo Qiujian, et al.Inductance parameter identification of interior permanent magnet synchronous motor[J].Micromotors,2008, 41(10): 35-38.
[7]骆光照, 刘卫国, 等.一种凸极式永磁同步电机的最大转矩控制方法: 中国,201110147940.X[P].
[8]安群涛, 孙力, 赵克.一种永磁同步电动机参数的自适应在线辨识方法[J].电工技术学报,2008,23(6): 31-36.An Quntao, Sun Li, Zhao Ke.An adaptive on-line identification method for the parameters of permanent maget synchronous motor[J].Transactions of China Electrotechnical Society,2008,23(6): 31-36.
[9]吴茂林, 黄声华.永磁同步电机非线性参数辨识[J].电工技术学报,2009,24(8): 65-68.Wu Maolin, Huang Shenghua.Nonlinear parameters identification of PMSM[J].Transactions of China Electrotechnical Society,2009,24(8): 65-68.
[10]Zhong L, Rahman M F, Hu W Y.Analysis of direct torque control in permanent magnet synchronous motor drives[J].IEEE Trans.Power Electron, 1997,12(5), 528-536.
[11]Zhong L, Rahman M F, Hu W Y.A direct torque controller for permanent magnet synchronous motor drives[J].IEEE Trans.Energy Conversion, 1999,14(3): 637-64 3.
[12]Giuseppe S Buja, Marian P Kazmierkowski.Direct torque control of PWM inverter-fed AC motors—a survey[J].IEEE Transactions on Industry Electronics,2004, 51(4): 744-755.
[13]孙丹, 贺益康.基于恒定开关频率空间矢量调制的永磁同步电机直接转矩控制[J].中国电机工程学报,2005,25(12): 112-116.Sun Dan, He Yikang.Space vector modulated based constant switching frequency direct torque control for permanent magnet synchronous motor[J].Proceedings of the CESS,2005,25(12): 112-116.
[14]严青, 邓忠华, 等.直接转矩控制系统低速性能分析—转矩观测器问题[J].电工技术学报, 1996,11(3): 21-27.Yan Qing, Deng Zhonghua, et al.The analysis of low speed performance of DTC variable speed system-torque observe[J].Transactions of China Electrotechnical Society, 1996, 11(3): 21-27.
[15]蔡斌军, 刘国荣.一种新型的改善直接转矩控制低速性能的磁链观测方法[J].电气传动,2007, 37(4):21-25.Cai Binjun, Liu Guorong.Novel method of stator flux estimating to improve direct torque control low speed performance[J].Electric Drive,2007, 37(4): 21-25.
[16]窦汝振, 温旭辉.永磁同步电动机直接转矩控制的弱磁运行分析[J].中国电机工程学报,2005,25(12):117-121.Dou Ruzhen, Wen Xuhui.Analysis of field weakening operation for the direct torque control of PMSM[J].Proceedings of the CESS,2005,25(12): 117-121.
[17]Zhang Yongchang, Zhu Jianguo, Xu Wei, et al.A simple method to reduce torque ripple in direct torque controlled permanent magnet synchronous motor by using vectors with variable amplitude and angle[J].IEEE Transactions on Industrial Electronics,2011,7(58): 2848-2860.