激光雷达扫描仪原理及在网状天线测量中的应用
2013-07-26王东伟陈晓晖北京航天计量测试技术研究所
贺 燕 刘 勇 王东伟 陈晓晖 殷 晴 / 北京航天计量测试技术研究所
0 引言
航空航天领域涉及许多几何形面的现场测试工作,几何形面测试结果与电性能测试结果的综合分析可以对天线的加工结果作出评价。目前,实现几何形面现场测试普遍采用电子经纬仪系统或跟踪仪系统,这两种系统无论在测量方法还是测试效率上都存在一定的局限性。美国Metris公司生产的新型激光雷达扫描仪(Laser Radar)采用了激光绝对测距专利技术和极坐标测量系统,实现了空间点三维坐标非接触的测量和快速扫描测量功能,避免了类似粘贴靶标或使用靶镜接触工件等现象,在保证同样的测试准确度情况下,大大提高了测试效率。该仪器特别适合国内正在开展研究的网状天线几何形面的测试。本文将结合仪器的原理,针对网状天线的测试予以介绍。
1 激光雷达扫描仪
1.1 仪器结构
激光雷达扫描仪通过激光干涉原理测量被测目标到激光头的距离,配合激光光束方位角(θ)和俯仰角(γ)的测量建立极坐标系统,再通过数学变换将极坐标转换为空间坐标。激光雷达扫描仪的测量原理如图1所示。一定程度上,激光雷达扫描仪与激光跟踪仪测量原理有相近之处,但是激光雷达扫描仪具备激光跟踪仪无法比拟的优势。激光雷达扫描仪利用了激光调频绝对测距的功能,可实现对被测目标非接触、快速扫描测量,避免目前各种仪器利用靶球接触测试或粘贴靶标等方法的局限性。
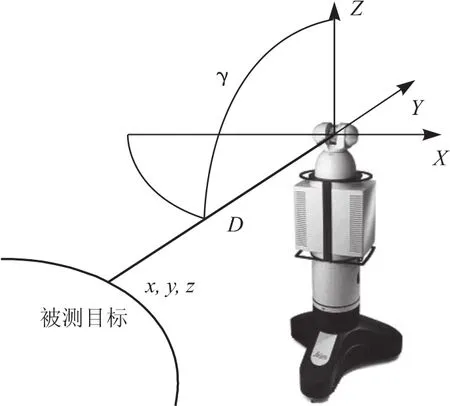
图1 激光雷达扫描仪测试示意图
该套系统中存在两种激光,光源皆为半导体激光器。一种是可见的红色激光,这种激光用于瞄准和回光指示,并不用于实际的测量;另一种是波长为1 550 nm的红外激光,此种激光具有200 THz的频率,可以有效减小外界干扰对测量的影响,因此作为测距激光。两种激光经过光耦合变为同轴激光,利用透镜调节装置来调节透镜的位置,实现对激光聚焦距离进行调整,二维回转扫描反光镜将出射激光反射射向不同方向,仪器测量范围得到最大扩展,测试变得更加灵活。操作人员可通过仪器内部的CCD摄像机实现对被测目标的实时观测。仪器光路上采用了迈克耳逊结构。耦合的激光在射出仪器前通过分光镜,一束分光射进一个标准光纤组,光纤组由若干条长度一定的标准光纤组成,通过光纤组的激光作为参考臂,测量臂激光射向被测物体,激光光束经被测物体上反射回来与光纤参考臂的激光汇聚发生干涉,产生拍频,根据拍波相位变化检测仪器原点到目标点的距离。根据测量物体距离不同,系统自动选取参考臂光纤,实现最准确的测量结果。同时方位和俯仰旋转轴系由精密轴系统和伺服马达驱动系统组成,俯仰角和水平角测量值由安装于反射镜轴系上的精密码盘读出。激光雷达扫描仪光路及结构原理图如图2所示。
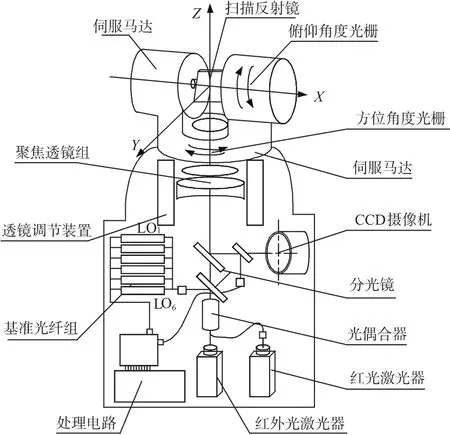
图2 激光雷达扫描仪光路及结构
得到的空间极坐标(γ,θ,V),利用公式(1)即可得出靶标所在目标点的三维坐标值(x,y,z)。
式中:θ— 极坐标系方位角;
γ— 极坐标系俯仰角;
R— 极坐标系的极径。
1.2 激光绝对测距原理
激光雷达扫描仪主要特点在于其专利技术——激光绝对测距技术。测距是与测长不同的概念。测长说明目标点相对某基准点的连续位移的增量,其有相对固定的方向性,双频激光干涉仪和跟踪仪即利用了这种原理。而测距是测量目标点到基准点的距离,测距不受方向性和连续性的限制,应用更加灵活。为了实现绝对测距就必须使激光器产生适于测距的激光,不同种类激光器产生激光的机理不同,气体激光器采用合成波原理,在技术上实现仍相当复杂,没有很好地解决多谱线稳频,整套技术并不完善,尚未应用于工业生产。而半导体激光器利用调频技术,相对比较成熟,激光雷达扫描仪就是利用半导体激光器调频实现绝对测距的[1]。
激光雷达扫描仪采用类似迈克耳逊干涉仪的光学结构,1 550 nm的红外测量激光被分成两部分,一部分进入光学参考臂,该参考臂是由一段精确标定过光程的光纤构成的;另一部分激光射向被测物体,相当于测量臂。出射光经物体表面反射回来与通过光纤的参考光相遇,若两干涉臂长度不等,两路反射回来的激光产生相对延时 ,会合后形成光拍。激光绝对测距不再用干涉条纹计数方法进行测量,而是根据光拍的频率与延时成正比,或者说是与两臂光程差成正比,测出拍频值,再算出对应的距离值。测量距离就转化为测量频率的问题,而这种测量并不要求测量臂反射镜从一个测点连续移动到另一个测点,只需将被测镜分别放置在两个测点,正好满足绝对距离测量的要求。
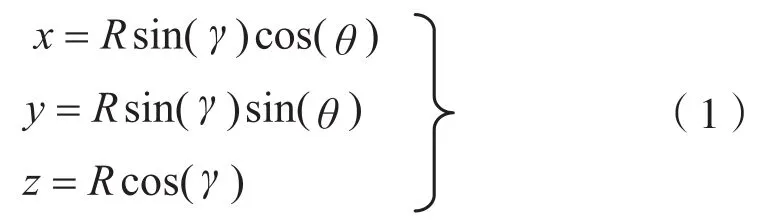
但是激光雷达扫描仪不同于激光干涉仪测长原理,它不是利用激光光频由于自身时延产生的拍进行测量,而是在1 550 nm红外激光200 THz的基础频率上,通过对半导体激光器采用电流注入方式进行调频,调频频率为0.5 kHz,约100 GHz的调频带宽,可见半导体激光的线性调频就是使激光发射的光频随时间线性变化。
激光调频就是对激光的频率用一三角波或锯齿波进行调制,得到一个调制波形(如图3所示)。其频率与时间的函数关系由公式(2)给出:

式中:f0— 激光的中心频率;
ΔF/ ΔT— 调制系数。
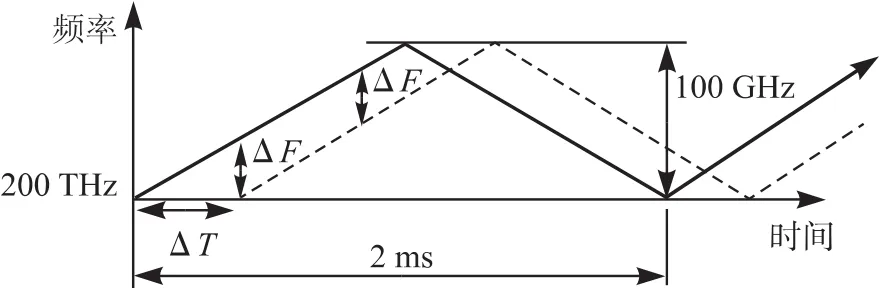
图3 激光调频示意图
调制后的激光射到被测物体上,经反射后由光学接收器接收,激光器到被测目标的距离R由公式(3)表示:

式中:τ— 时间;
c— 激光的光速。调制后的激光经分光后形成一路参考光和一路测量光,测量光射向被测目标,经反射后与参考光混频,产生拍波。两路光波频率之差即为拍频,如图4所示。
拍波频率为
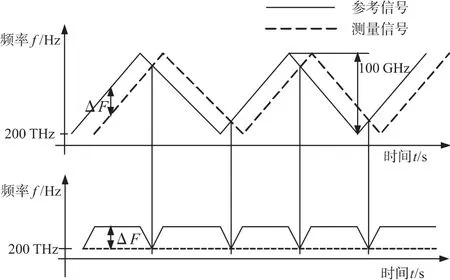
图4 拍频示意图

由拍波频率可精确地计算出时间τ,则被测目标点的距离:

由于测量臂与参考臂不同,使得测量臂信号相对于参考臂信号有延时ΔT,并产生光拍,这个拍随着ΔT的增大而增大。测量延时ΔT来计算光程差显然不太现实,但通过测量拍频来计算光程则易于实现 [2,3]。
另一方面,将公式(5)求导可得

由公式(6)推导可得Δfp= 575(kHz/m)·ΔR,当Δfp= 0.58 Hz时,ΔR= 1 μm,即0.58 Hz的拍频变化所代表的被测物位移变化量为1 μm,通过测量相位变化就可以得到频率的变化量。现有的相位分辨技术完全可以达到1/1 000的分辨力,因此保证准确测量可达到微米量级。
激光雷达扫描仪内测量臂光纤是经过精确标定的,最短的光纤长度为L= 4.2 m左右,经调频的激光频率为2.3 MHz,当拍频用fp表示时,测量距离可用公式(7)表示:

可见当拍频为0时,测量臂与参考臂相同,为2L,被测物距仪器中心距离为L。拍频为4.6 MHz时,测量臂长度为4L,被测物距仪器中心距离为2L。随距离增大,拍频并不是线性增加,而是在0~ 4.6 MHz内作周期变化,其变化曲线如图5所示。
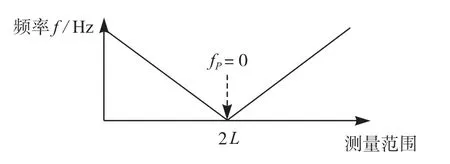
图5 拍频的变化曲线图
当被测物体距离超出2L时,仪器也遇到了结果唯一性的问题,可见此种测量也是有测量范围限制。因此仪器中安装了多条不同长度并精确标定的光纤来满足更大范围的测量,解决测量多值性的问题,结构示意图如图6所示。测量过程中,当测量距离超出所采用标准光纤长度两倍时,仪器自动选取下一条标准光纤对距离重新测试。通过采用不同参考臂分别测量,并对测量结果进行比较,选取一个最佳测量值作为结果。在1 ~ 60 m的测量范围内,随着被测物体距离的变化,所采用的参考光纤也发生变化,在两条光纤共同作用区域,系统自动根据两个测量结果的准确度进行参考光纤的选择。不同参考臂光程长度与拍频的关系图如图7所示[4]。
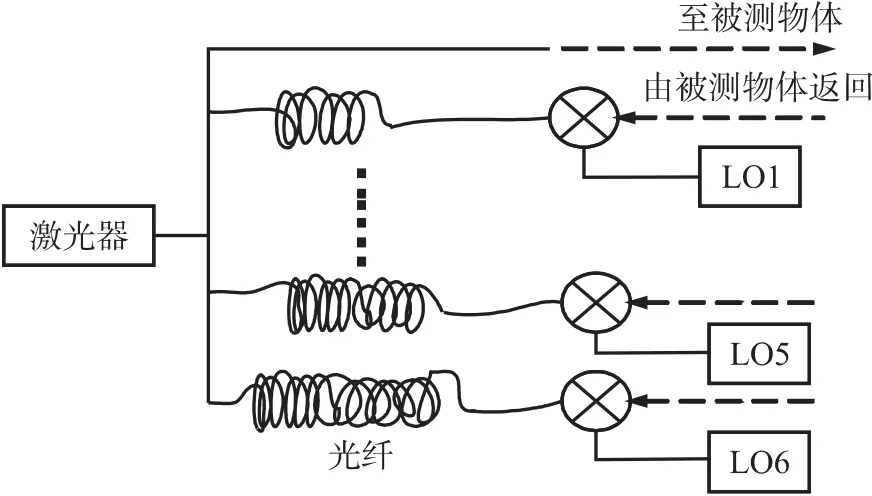
图6 多条参考光纤参与测量结构示意图
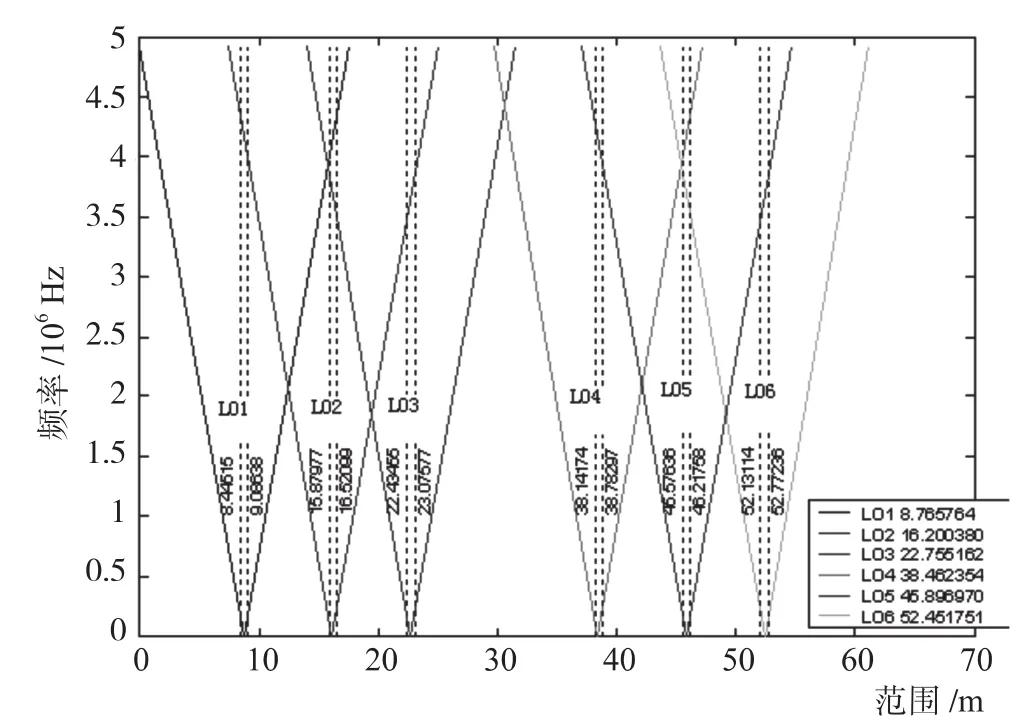
图7 参考臂光程长度与拍频的关系
据式(5)可知,提高测量准确度的关键是提高半导体激光器调频线性度,即提高半导体激光的调频频率,使得调制三角波的一周期内,光频的变化量要大,而且调制波的频率也要尽量的高才好,这样可使大范围的长度测量达到微米级。由于激光雷达仅仅依靠拍波频率进行距离的测量,而与信号幅度无关,所以它大大降低了对测量环境条件和被测物体反射率的要求,即使返回光束功率为1 pW,也能进行可靠的测量。
1.3 激光雷达扫描仪技术特点
激光雷达扫描仪是一种新型大尺寸测量仪器,可以测量60 m半径范围内的工件,既可以非接触点测,也可以扫描自动测量,使得测量更加方便,工作效率更高。
1.3.1 技术指标[5]
1)测量范围:MV260型 60 m;
2)空间误差(2σ): 1×10Lμm;
3)扫描速率:1 000点/s;
4)测量范围:方位角 0°~ 360°;
俯仰角 -45°~ 45°。
1.3.2 技术特点
1)非接触测量方式,无需测量靶镜或粘贴靶标,对被测物体表面没有破坏和影响;
2)可以实现自动扫描测量,适应性强、效率高;
3)可实现复杂环境下测试,无需人工干预;
4)测量结果可生成三维实体图像,有利于进行逆向工程;
5)可以利用镜面反射测量,适用于回转体及盲区的测试,降低移站对测量准确度的损耗。
2 激光雷达扫描仪在网状天线测试中的应用
2.1 网状天线
激光雷达扫描仪可以实现空间坐标点非接触高准确度测量,特别适合应用于网状天线的测试。网状天线是一种常见的展开天线类型,其反射面由一种编制金属网构成,具有质量轻、展开收缩比大的特点,因此对于降低航天器有效载荷及体积有很大作用。尽管金属网面不属于实体表面,是不连续的,但是仍然能够反射高达40 GHz的无线电波。通过不同的支撑结构,网状天线可以实现多种构型。目前,国际先进的航天国家的网状天线技术相对比较成熟,如美国研制的刚性肋天线(RRA)、缠绕肋天线(WRA)(图8)、铰链肋式天线(HRA),俄罗斯生产的EGS天线(图9),日本NTT研制的可展单元式网状天线等。相比国外研制情况,我国还处于网状天线研制初期,对于天线有效测量更是没有经验可循。中国科学院电子学研究所走在网状天线研究的前列,为某型号卫星研制SAR(合成孔径雷达)天线系统已经完成实验,开展了进一步的应用。为了使SAR网状天线达到相关设计要求,我们与中科院电子所合作,研究解决网状天线形面测试的难题。

图8 缠绕肋天线(WRA)外观
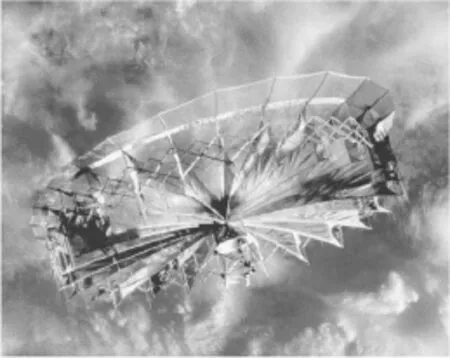
图9 俄罗斯EGS天线外观
星载SAR轻型网状天线采用的桁架式可展开网状抛物线天线,该种桁架单元构成的大型空间可展桁架结构由于具有收缩体积小、刚度高及形状构造灵活等优点,可以作为桁架式网状抛物面反射器的一种有效支撑结构。在结构的节点或杆件终点处按特定的要求设置扭簧,折叠时扭簧受预应力存储变形能量,结构解锁时,扭簧释放弹性能量,驱动结构逐步展开。
星载SAR轻型网状可展开天线网面的形面准确度、天线形面方向位置参数与天线电性能直接相关。为了保证天线电性能达到设计指标要求,必须对天线机械性能参数做出相应的校准。利用大尺寸坐标测量系统可以完成天线面型及形面方位等参数的测量,并对天线加工结果进行校准,但是由于网状天线的特殊结构,应用传统的大尺寸测试仪器有局限性,效率也不高。如电子经纬仪测量系统和摄影测量系统都需要在被测物体上粘贴靶标,而靶标会在天线上残留胶质多余物,对于天线的收拢展开会造成影响。激光跟踪仪测试过程中,需要用跟踪棱镜接触测量物体本身,且测试效率不高。而激光雷达扫描仪扫描测量可以很好地满足天线测试的要求,一方面不接触被测天线,不会有外力对形面产生影响;另一方面,测量的自动化可以尽可能多地收集形面信息,完整反映形面特征。
2.2 测量步骤的实施
2.2.1 天线形面测试
首先利用激光雷达扫描仪在网状天线边沿测取若干个点作为边界点,边界点构成一个封闭的区域即为待测区域。通过软件设置自动扫描的点间隔,包括步距和行距,仪器根据设定要求进行自动化空间点扫描测量,每个点自动聚焦测量得出点坐标值。在测量区域内所有测量点就构成网状天线的形面数据,通过拟合分析计算,得出拟合形面的均方差、焦距、顶点和焦点坐标等数据。网状天线安装有中心杆及馈源等机械部件,该机械部件的形位参数要与天线几何参数具有对应关系,因此根据测试数据与机械部件参数,比较并指导机械部件的位置调整,直至偏差满足预定的要求为止。
2.2.2 天线位置
在天线形面满足设计要求后,为了实现天线电性能测试,网状天线需要被安置在微波暗室内进行试验。微波暗室内有一个电信号发射器,发射器能够形成一个扫描平面,网状天线形面与发射器扫描平面间要求有一定的位置关系,通过测试网状天线上的某些特征点作为参考点。参考点反映天线位置参数,与扫描形面进行位置和姿态比较,利用二轴转台对反射器俯仰角和偏航角进行调整,直至偏差满足预定要求。
2.3 测量结果及分析
测试结果显示,激光雷达扫描仪扫描测量功能具有自动化高、测点质量好、准确度高的特点,其非接触测量特别适合网状天线的测试。在同一个坐标系下,完成对整个形面的扫描,形成扫描测量点点云(如图10所示)。对测量异常点按照一定的规则剔除后,整个形面保留了15 000多个点,测量点数量充分地反应了形面的特征,对测量点进行形面拟合得出抛物面焦距为2 172 mm,RMS为2.94 mm,满足技术指标要求。天线的电性能测试满意的结果再次证明天线形面位置的正确,而这一切都是通过准确的测试才得以保障。
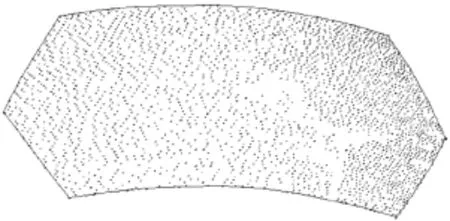
图10 SAR天线形面点云图
3 结语
激光雷达扫描仪的应用很好地解决了网状天线测试的难题,从而为我国网状天线的研制提供了计量保障。激光绝对测距原理应用于大尺寸测试仪器,仪器测试方法和效果都有很大的提高,对于空间大尺寸测量有很大的促进作用。高准确度空间尺寸形面测量要求不断增加,尤其大型航天器外形公差测量、箭船对接、卫星天线形面测量方面,都亟需更高准确度、更快速的测量方法,因此激光雷达扫描仪将以其高效率、高准确度、功能强的优势在航空航天等领域发挥越来越大的作用。
[1] 殷纯永. 现代干涉测量技术[M].天津:天津大学出版社,1999.
[2] 沈兆欣. 调频激光雷达空间测量技术探讨[J]. 宇航计测技术,2005(04):5-10.
[3] Tony Slotwinski and Patrick Blanckaert.Frequency Modulated Coherent Laser Radar Technology[C]//. Proceedings of the OPTIMESS2007 Workshop. Leuven, Belgium:OPTIMESS ,2007:28-30.
[4] White David A,Jack Shry. Noncontact Measurement for Today and Tomorrow[J]. Emerald Management Reviews,2000, 20(7):38-41.
