基于数字图像处理的尾矿坝位移监测
2013-07-25茹乃瑜牛昱光杜宏伟
茹乃瑜,牛昱光,杜宏伟
(太原理工大学 信息工程学院,山西 太原 030024)
尾矿坝的安全检测是保证矿山尾矿坝安全管理,防止安全事故的发生的重要手段。根据国家规定的矿山尾矿坝监测的目的和要求,其监测的项目主要有坝体位移、浸润线高度、干滩长度、渗流量及库水位等。其中坝体位移是尾矿坝最重要的和首要检测参数,也是坝体稳定性最直接的反应。
目前尾矿坝位移监测传统的监测方法有:视准线法,正、倒垂线法,前方交会法,测斜管法和几何水准法等。但这些方法都只能监测水平位移或者垂直位移中的一种,而且精度也不是很高,不能实现自动化监测,所以这些方法都有很大的局限性[1]。
现代化的监测手段有全站仪和GPS等,精度比较高,其中GPS测量可达到亚毫米的相对定位精度,安装方便,可实现全天候的实时监测,但是成本较高,价格昂贵,在大型的尾矿坝体的应用比较广泛。
本文研究的是一种新兴的坝体位移监测方法。该方法结构简单,测量范围大、精度较高、成本不高和可实现自动化等优点,很好地弥补了以上方法的缺点。
1 系统架构
系统框图如图1所示,主要由激光器、准直系统、光探测器和信息处理系统等构成。其中激光器和激光接收器固定在两边山体上,准直系统则安装在坝体上,激光器选用稳定性较好的氦氖激光器,从光源发射的激光通过准直滤光系统,再经高反射率衰减片之后成像到光检测器上,在接收器上形成一个光斑。光源、准直系统、菲涅尔波带片、光探测器在理想状况下是在一条直线上。当坝体发生位移时,将带动波带片同时移动,那么其所成的像在检测器上也发生相应的移动,通过测量探测器上的光斑的位移量,就可以进一步得到准直系统的位移。

图1 尾矿坝位移监测系统结构示意图
其中处理器采用三星公司的ARM11芯片s3c6410,CCD摄像头将拍摄的图片传输给s3c6410,s3c6410读出图像数据,进行数字图像处理,求出位移变化量,处理完成后交付给无线通信Zigbee模块。Zigbee模块发送给监控中心,在监控中心通过VC语言编写的实时监控软件显示出来,同时发布到Web站点上,使监控人员能够随时随地进行监测,发现异常,并能及时报警。
2 准直扩束系统
激光腔产生的激光束,既不是平面波,也不是均匀的球面波,而是高斯球面波[2]。高斯光束的特征是准直性好、光束集中,且发散角较小,在较短距离的测量中,光束的发散并不明显,可以省去聚焦准直透镜,从而降低成本。但在较大长度中,激光器光束的束腰存在一定的直径,光束的发散就比较严重。所以仍需准直扩束系统进行整形。
准直扩束系统多采用二次透镜的形式,第一次变换透镜是采用短焦距的聚焦透镜来压缩高斯光束的束腰半径,使其越小越好。第二次的透镜焦距较大,其目的是减小高斯光束的发散角。准直扩束光学系统的设计应该满足焦距大于后工作距离,即镜头的主面距离光学系统的焦面较远。所以设计的系统应由双凸面透镜和负凹凸透镜构成。双凸面透镜位于像方侧,负凹凸透镜位于物方侧,并使凹面向着像方侧,结构如图2所示。

图2 准直光学系统结构
准直透镜系统的参数还需满足下面条件

式中:f'1为双凸透镜焦距,f'是组合系统的焦距,d2是双凸面透镜与负凹凸透镜邻接面之间的距离,r3为负凹凸透镜像方侧透镜面的曲率半径。式(1)是决定准直透镜的NA条件。式(2)与球面像差补偿有关。
因为氦氖激光器发射的激光束功率很大,如果CCD上的光照度过大,就会使得CCD的输出饱和而无法工作。因此需要对激光进行大幅度的衰减,所以还需要加上衰减片,使其透过率降低。
3 菲涅尔波带片
菲涅尔波带片是基于菲涅尔波带理论的一种光学元件。菲涅尔波带片和一般的玻璃透镜比较,具有无像差、加工制作简单、成本低、面积可以做的很大、抗机械震动能力强等优点,所以常和激光配合使用,用于大型工程中。
菲涅尔波片带是一种特制的衍射屏,波带片的成像公式为[3]

式中:S为物距;S'为像距;f为焦距。与透镜成像公式相似。菲涅尔波带片的环数越多,相应地亮度就会越高,但制作起来会困难一些,还会带来一定的误差,所以实际中一般取5~8环。
4 监测原理
图3为监测原理图,P为激光源,菲涅尔波带片L的光心为O,A和A'为CCD光斑接收屏,P经过L成像与A点。Z和Z'分别为光源到透镜和透镜到光探测器的距离。
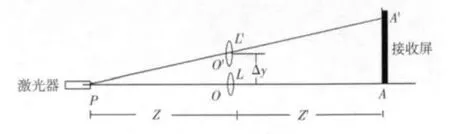
图3 监测原理图
通常情况下,当该处大坝发生位移Δy时,带动L一起移动,L的光心从点O移动到O',同时,CCD上的像A相应地移动到像A'。由于CCD定标于A点,所以像点的位移量就反映出坝体的位移Δy。根据三角关系有

因为透镜组的位置是固定的,所以Z和Z'已知,只要能精确探测到像点的位移量,就可以进而计算出坝体的位移量。通过各个测点得到坝体变形量。
系统的光接收器每隔一段时间对光斑进行采样,计算出重心位置,并将数据发送到监控中心。
5 接收装置与图像处理过程
接收装置主要是CCD摄像机,其中CCD的分辨率D可表示为[4]

式中:S为成像范围;P表示相应的像素数;K=Z/Z',是监测点与光源的距离Z和发射器与接收器的距离Z'的比值。可选取合适分辨率的CCD摄像机。
CCD成像的理想激光光斑应该是个圆滑的圆点。但在实际中,存在衍射现象,并且光学系统也存在一定的像差影响,使光斑发生变形,则光斑的中心必定会与实际位置产生偏差。再加上其他各种各样的干扰因素,也将引起中心位置的偏移。因此,首先要进行数字平滑滤波,剔除干扰和随机误差,在实际中使用中值滤波,第二步是取阈值,第三步是求取光斑中心。
常见的中心定位方法有重心提取法、Hough变换法和圆拟合法等,本文采取精度相对较高并且速度较快的重心提取法来实现光斑中心的提取[5]。它的基本原理如下
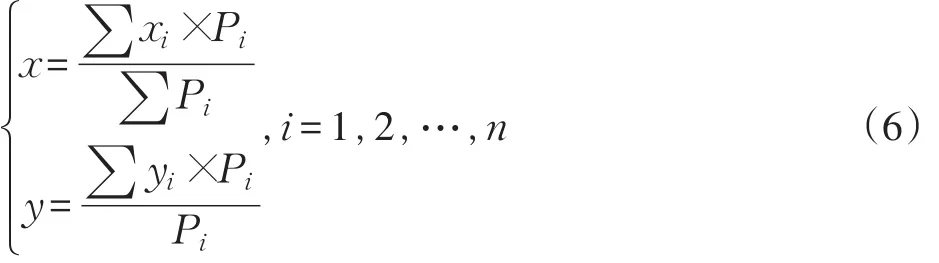
式中:图像像元的灰度值为P,重心坐标为(x,y),总像元数为n。实际中往往对CCD图像进行多次采样取平均值,以提高精度。
图像处理程序流程如图4所示。
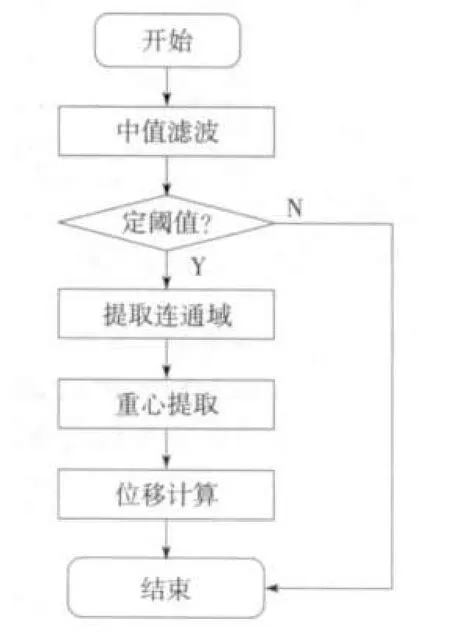
图4 重心提取流程图
6 实验分析
在实验室中搭建尾矿坝模型,其中位移监测的实验装置总长度为100 m,光源选择一般的半导体激光器,波长为605 nm,金属波带片的焦距为140 mm,CCD选择512×512像素的即可满足精度要求,图像处理程序选择MATLAB来处理。
实验过程中,先移动波带片,记录下一组位移量,然后对应地将系统采集到得图像进行处理,用MATLAB求取位移量,将测量值和实际值进行比对,即可求取误差值。图5是用MATLAB生成的波带片位移量和相应的光斑位移量的实验数据和理论曲线的对照图像,从图5可以看出图像相当吻合,基本成线性关系,满足位移监测的精度要求。

图5 系统精度考察
7 结论
本方法的精度较高,满足一般的大坝位移监测要求,易于实现自动化检测,而且可同时观察水平和垂直位移。在实际应用时,建议在大气激光线路上加上大气管道装置,安装真空泵,将管道抽成真空以便减少折射影响,可以进一步提高精度。总体来说,该方法是监测尾矿坝体位移的一种较理想的方法。
[1] 赵志仁.大坝安全监测设计[M].郑州:黄河水利出版社,2003.
[2] 周炳琨.激光原理[M].4版.北京:国防工业出版社,2000.
[3] 韩军.工程光学[M].北京:国防工业出版社,2000.
[4] 王晓旭.全自动真空激光大坝变形测量系统的研制[D].大连:大连理工大学,2005.
[5] 徐亚明,邢诚,刘冠兰,等.几种激光光斑中心检测方法的比较[J].海洋测绘,2007(2):1-4.
