基于测控电磁波极化特征信息的飞行器姿态估计
2013-07-25孙红梅陈广东
孙红梅*① 陈广东② 张 弓①
基于测控电磁波极化特征信息的飞行器姿态估计
孙红梅陈广东张 弓
(南京航空航天大学电子信息工程学院 南京 210016)(南京航空航天大学无人机研究院 南京 210016)
该文应用正交解耦的姿态参数信号模型描述极化电磁波的3维波结构,将最大似然估计和MUSIC算法推广应用于部分极化波参数估计,利用极化电磁波传递信号基站标定的姿态基准信息。飞行器通过单电磁矢量传感器接收并处理信号,确定电磁波结构向量,计算得到地理坐标系下的飞行器姿态。此方法有别于需多点测量的三角计算法,只需一个地面基站信号和运动平台上单一接收点,就可实现姿态感知,可替代姿态导航仪和航向导航仪。该文介绍了运动平台姿态估计算法,为工程应用提供技术支持。
电磁矢量传感器;极化状态;波达方向;姿态导航;部分极化信号
1 引言
电磁波是雷达和通信等信息系统中承载信息的媒介,信号时延、多普勒频率、空间到达角和极化状态是其重要特征参量,能携带丰富的信息。在时域,电磁波的往返时间用来探测目标的距离;在频域,多普勒频移用来探测目标速度;在空域,波达角用来探测目标方位。因此对电磁信号的获取和处理显得尤为重要。目前提出的利用旋转不变ESPRIT类算法研究波达角和极化角的联合参量估计问题,所用阵列为均匀、矩形、稀疏电磁矢量传感器阵列,它要求阵元间距离远大于信号半波长。而MUSIC算法通过构造空域-极化域联合参数估计谱,搜索MUSIC谱峰值位置来估计信号到达角和极化角,其对联合谱的谱估计精度和分辨力这两项性能指标要求很高。此外,国内外都研究在地球卫星导航系统接收端利用多点接收、三角计算的方法来感知姿态。相比之下,利用单一电磁矢量传感器估计信号波达方向和极化参数的优势在于:(1)适用于近场或远场,宽带或窄带信号;(2)在空间域-极化域可分离多个极化信号;(3)阵列体积小,分辨率相对较高;(4)天线的工作方向覆盖全空域,各方向信号接收性能一致,适宜机动平台使用。
本文应用正交解耦的姿态参数信号模型描述极化电磁波的3维波结构,优化传统的最大似然估计部分极化波参数估计方法,利用极化电磁波传递信号基站标定的姿态基准信息,避免了前面方法提出的一些标准要求,只需一个基站信号和飞行器上单一接收点,就可实现姿态感知,并用仿真实验验证了方法的有效性。
2 电磁矢量传感器接收信号

(1)

主次极化分量导向矢量:
其中
空域导向因子:
极化域导向因子:


根据3维空间旋转理论知,绕坐标轴的3次连续旋转可以用1次旋转替代,3个连续旋转矩阵相乘可合并为1个旋转矩阵:
(3)
可得:

3 信号参数最大似然估计
若要在噪声环境下获得高精度参数估计,可应用最大似然估计。假设式(1)中的在飞行器测控系统中为固定量,定义。考虑到飞机与地面站距离不断变化,飞机所处空间环境不断变化,噪声方差和接收信号功率也不断变化。该信号模型快拍取样的似然函数为:

似然函数对数为:

代入式(5)得:

图2 为姿态导向矢量信号最大似然估计仿真结果,图中信噪比0 dB,采样快拍1000次,信号的极化椭圆率,极化度60%。图2(a)和图2(c)中接收到的信号1姿态参数分别为31°, 64°和17°,图2(b)和2(d)中接收到的信号2姿态参数分别为2°,和13°,图2(a)和图2(b)为和时随变化的3维图形,由图可见,在与信号源参数匹配位置出现清晰峰形。图2(c)和图2(d)分别为图2(a)和图2(b)的等高线图,可方便观察峰的位置。
4 MUSIC算法估计多信号参数
MUSIC算法正是利用信号子空间与噪声子空间的正交性来估计信号DOA。利用噪声子空间的所有向量构造MUSIC谱,空间方位谱中的峰值位置则对应信号的来波方向。MUSIC算法对天线阵列的形状没有要求,很大程度上提高了测向分辨率。估计多信号源参数时,基于特征值分解的MUSIC算法计算效率优于最大似然估计。将部分极化波唯一分解为两个极化状态正交的完全极化波的叠加,,分别为信号的主次极化分量导向矢量。具体步骤如下:
式中前后项分别为部分极化波主次极化分量零谱的倒数。通过式(7)求得极大值的位置来确定信号参数。
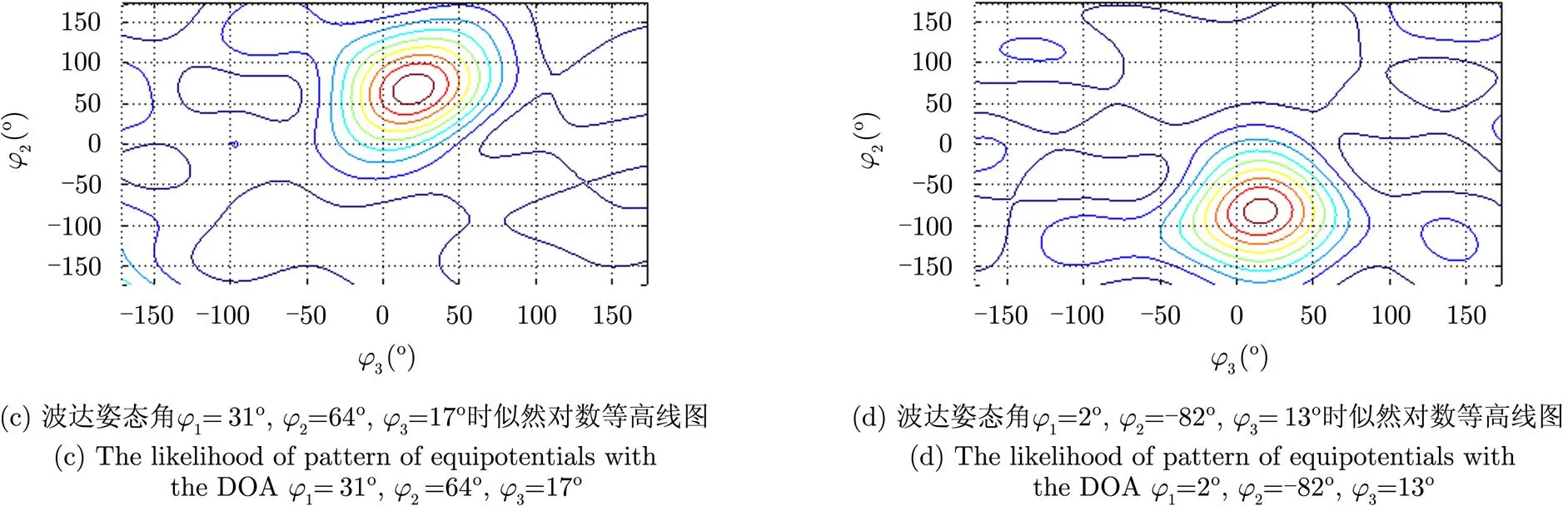
图2 姿态导向矢量信号的最大似然估计结果(信号极化度60%,信噪比0 dB)

图4为MUSIC算法估计多信号参数仿真结果,图4中的两个信号源极化度为60%,其余参数和采样条件与图2和图3中分别出现的两个信号相同,图4采用姿态导向矢量信号计算MUSIC谱。由图4(a)和图4(b)可见,在信号参数匹配位置,出现了清晰的峰,表明采用姿态导向矢量信号计算MUSIC谱,能正确估计多信号参数。
图5出现的两个信号源与图4相同,图5采用空域-极化域导向矢量信号计算MUSIC谱。图5(a)极化椭圆倾角与信号1匹配,由图5(a)可见,在信号1参数匹配位置,出现了清晰的峰,同时存在信号2的干扰峰。图5(b)极化椭圆倾角与信号2匹配,由图5(b)可见,信号2的主峰旁出现寄生峰。
计算MUSIC谱估计多信号参数仿真结果表明,采用姿态导向矢量信号模型更有利于参数估计。
5 飞行器姿态估计
配置于地面的基站作为极化波的辐射源向飞机发射椭圆极化波,飞行器利用电磁矢量传感器接收基站信号,估计出,得机身坐标系到波结构坐标系转换矩阵;设基站测得的对飞机的仰角为,方位角为偏北(逆时针向),通信传递给飞机,在地理坐标系下发射信号的极化参数为固定值,可直接存储在飞机中,满足远场条件时,和也不变,也可直接存储在飞机中。由得波结构坐标系到地理坐标系转换矩阵为:

机身坐标系到地理坐标系转换矩阵为:
(8)

图4 姿态导向矢量信号的MUSIC算法(信号极化度60%,信噪比0 dB)

图5 空域-极化域导向矢量信号的MUSIC算法(信号极化度60%,信噪比0 dB)
因机身坐标系中,飞机姿态矩阵为单位阵,所以式(8)就是地理坐标系下飞机姿态矩阵。该姿态矩阵已完整地表达了飞行器空间姿态,若将该姿态矩阵化为:

单电磁矢量传感器可全向工作,即在飞行器的任何机动姿态下,电磁波姿态测量都将有效。与机载天线相比,地面基站的大型天线系统测得的参数精度高得多,仿真满足远场条件时,忽略误差,仅考虑机载天线端测量参数的误差,地面基站测得为。图6为从单电磁矢量传感器接收信号中估计飞行器姿态参数的仿真结果。地面站发射信号为320 MHz单色波。实验仿真了在飞行器航向角旋转90°,横滚角上下摆动,俯仰角保持为0º的连续航姿变化过程。其间根据电磁波信号估计飞行器姿态角,作了36次姿态测量,进行每次估计的接收信号包含连续1024快拍,持续时间约,信号为部分极化波,极化椭圆率,连续快拍采样频率320 MHz。图6(a),图6(b),图6(c)横坐标为测量次数,纵坐标为横滚角、俯仰角和航向角,坐标单位为°,图中“”形线为理想角轨迹,“o”为本文最大似然估计方法估计得出的横滚角、航向角和俯仰角,图6(a),图6(b),图6(c)接收信号的极化度为60%,,信噪比10 dB。由图6(a),图6(b),图6(c)可见本文最大似然估计方法估计得出的结果与理想值接近,在此条件下可以满足普通飞行器控制的要求。图6(d),图6(e),图6(f)为时,不同极化度情况下,前述仿真实验的36次姿态角估计的标准差随信噪比变化的曲线。图6(d),图6(e),图6(f)横坐标为接收信号的信噪比,纵坐标为36次实验统计出的各姿态角参数估计标准差,单位为°。图6(d),图6(e),图6(f)中信号的极化度分别为50%, 25%和75%,图6(d),图6(e),图6(f)中“”,“×”和“。”线分别为俯仰角、横滚角和航向角参数估计标准差随信噪比变化的曲线。图6(d),图6(e),图6(f)可见各姿态角参数随信噪比、极化度提高,估计误差减小。估计精度在信噪比、极化度过小时,出现恶化。

6 结论
极化电磁波具备3维波结构,传统的电磁波空域-极化域导向矢量信号模型割裂了自由度的空间姿态信息,不能对姿态参数进行整体优化,存在不足之处。本文提出的姿态导向矢量信号模型,姿态参数正交解耦,在估计信号参数时表现出更好的估计性能,为研究空域-极化域参数联合估计问题提供了新思路。
部分极化波是电磁波存在的一般形式,本文将最大似然估计和MUSIC算法推广应用于部分极化波参数估计。仿真数据结果可见,从单电磁矢量传感器接收信号中估计飞行器姿态参数,精度达到飞行控制的要求,能作为自动驾驶仪航姿导航信息源。
附录A 旋转矩阵的指数表示

记式(A-1)为:
(A-2)
得:

由式(A-3)得:
(A-4)
绕坐标轴的3次连续旋转矩阵相乘也可化为式(A-2)形式,从中计算出。

经过化简正是式(A-1)。
附录B 最大似然估计的分步算法[16,20]

同样:
因此:
得:

因为:
所以:

代入式(A-1)得:

简化为:
(A-7)

同理可得:

由此得到:

这样:
(A-9)


根据式(A-9):
因此:

根据
得:

得:

将各符号展开代入式(A-10):
[1] Schmidt R O. Multiple emitter location and signal parameter Estimation[J]., 1986, 34(3): 276-280.
[2] Wong K T and Zoltowski M D. Closed-form direction finding and polarization estimation with arbitrarily spaced electromagnetic vector sensors at unknown locations[J]., 2000, 48(5): 671-681.
[3] Zoltowski M D and Wong K T. ESPRIT-based 2-D direction finding with a sparse uniform array of electromagnetic vector sensors[J]., 2000, 48(8): 2195-2204.
[4] Wong K T. Blind beamforming/geolocation for wideband- FFHs with unknown hop-sequences[J]., 2001, 37(1): 65-76.
[5] Roy R and Kailath T. ESPRIT-estimation of signal parameters via rotational invariance techniques[J].,, 1989, 37(7): 984-995.
[6] 徐振海. 极化敏感阵列信号处理的研究[D]. [博士论文], 国防科技大学, 2004.
Xu Zhen-hai. Study on the signal processing of polarized array[D]. [Ph.D. dissertation], National University of Defense Technology, 2004.
[7] Cho Am, Kang Young-shin,.. Altitude Integration of radar altimeter and GPS/INS for automatic takeoff and landing of a UAV[C]. 2011 11th International Conference on Control, Automation and Systems, KINTEX, Gyeonggi-do, 2011: 1429-1432.
[8] Wang Xiao-liang, Shao Xiao-wei, Gong De-ren,.. GPS/ VISNAV integrated relative navigation and attitude determination system for ultra-close spacecraft formation flying[J].2011, 22(2): 283-291.
[9] Wong K T and Zoltowski M D. Uni-vector-sensor ESPRIT for multisource azimuth, elevation, and polarization estimation[J]., 1997, 45(10): 1467-1474.
[10] Ko C C, Nehorai J, and Nehorai A. Separation and tracking of multiple broadband sources with one electromagnetic vector sensor[J]., 2002, 38(3): 1109-1116.
[11] Nehorai A and Paldi E. Vector-sensor array processing for electromagnetic source location[J]., 1994, 42(2): 376-398.
[12] Li Jian. On polarization estimation using a polarization sensitive array[C]. IEEE Proceedings Sixth Workshop on Satistical Signal and Array Processing, in Australia, 1992: 465-468.
[13] Wong K T. Direction finding/polarization estimation-dipole and/or loop triad(s)[J]., 2001, 37(2): 679-684.
[14] Shuster M D. A survey of attitude representations[J]., 1993, 41(4): 439-517.
[15] 张文典. 极化阵列信号参量估计方法研究[D]. [硕士论文], 吉林大学, 2007.
Zhang Wen-dian. Study on paremeters estimation of polarized array signal[D]. [Master dissertation], Jilin University, 2007.
[16] Marius P and Gershman A B. Maximum-likelihood direction-of-arrival estimation in the presence of unknown nonuniform noise[J]., 2001, 49(7): 1310-1324.
[17] 张小飞, 汪飞, 徐大专. 阵列信号处理的理论和应用[M]. 北京: 国防工业出版社, 2010: 41-88.
Zhang Xiao-fei, Wang Fei, and Xu Da-zhuan. The Thesis and Application of Array Signal Processing[M]. Beijing: National Defence Industry Press, 2010: 41-88.
[18] 邓正隆. 惯性技术[M]. 哈尔滨: 哈尔滨工业大学出版社, 2006: 147-165.
Deng Zheng-long. Inertial Technology[M]. Harbin: Harbin Institute of Technology Press, 2006: 147-165.
[19] Hochwald B and Nehrai A. Concentrated Cramer-Rao bound expressions[J]., 1994, 40(2): 363-371.
[20] Stoica P and Nehorai A. MUSIC, maximum likelihood, and Cramer-Rao bound[J]., 1989, 37(5): 720-741.
Estimation of Aircraft Attitude/Heading Based on thePolarization of Electromagnetic Waves
Sun Hong-meiChen Guang-dongZhang Gong
(College of Electronic and Information Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)(Unmanned Aerial Vehicle Research Department, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)
This paper illustrates the full use of an orthogonal decoupling signal model to describe the 3-D construction of polarized electromagnetic waves. The maximum likelihood method and MUSIC algorithm were introduced into the parameter estimation of partially polarized waves. Attitude reference information for an aircraft that was calibrated by an information base station was delivered by polarized electromagnetic waves. Through receiving and processing the information of the aircraft, a single electromagnetic vector sensor can acquire the aircraft attitude in a geographic coordinate system. Differing from the triangle calculation method which relies on a multi-point measurement, the proposed method only needs a base station signal and a single receiver on the motion platform to realize the posture perception of aircraft. It can therefore serve as a substitute foraircraft attitude navigation and aircraft heading navigation. The introduction of the motion platform attitude estimation algorithm provides a technology support for engineering applications.
Elecrtomagnetic vector sensor; State of polarization; Direction Of Arrival (DOA); Attitude determination; Partially polarized signal
TN911
A
2095-283X(2013)04-0466-10
10.3724/SP.J.1300.2013.13087
2013-09-22收到,2013-12-05改回;2013-12-11网络优先出版
国家自然科学基金(61271327, 61071163)资助课题
孙红梅 876520283@qq.com
孙红梅(1990-),女,江苏盐城人,为南京航空航天大学硕士研究生,主要研究方向为通信与信息系统。
E-mail: 876520283@qq.com
陈广东(1968-),男,副研究员,研究方向为雷达与测控。
张 弓(1964-),男,教授,博士生导师,主要研究方向为雷达信号处理、目标探测与识别、图像分析与处理等。
