小波域基于聚类分割的运动目标检测算法
2013-07-20刘英霞常发亮
刘英霞,常发亮
1.山东传媒职业学院,济南 250200
2.山东大学 控制科学与工程学院,济南 250061
小波域基于聚类分割的运动目标检测算法
刘英霞1,常发亮2
1.山东传媒职业学院,济南 250200
2.山东大学 控制科学与工程学院,济南 250061
1 引言
运动目标检测在计算机视觉和模式识别领域中得到了越来越广泛的应用[1-2],是视频实时监控系统中非常关键的技术,也引起人们越来越多的关注,成为热门的研究领域之一。要准确快速地检测出目标,确定阈值的算法至关重要[3]。目前有很多文献研究了各种场景情况下运动目标的检测算法,如基于目标形状特征、基于目标颜色特征等,目标检测算法可以在时域实现[4-10],如文献[4]为了实现复杂环境下变化较大的目标检测,提出一种在复杂背景图片中快速目标检测的算法。文献[5]结合似然函数和贝叶斯判别准则理论,根据信号和噪声的统计分布规律,推导计算出一个自适应的动态阈值,利用该阈值对水平投影进行优化处理,得到待检测的目标。
由于受自然条件、设备本身条件等各种因素的影响,使系统存在噪声,这将直接影响目标检测的精准性。小波变换具有良好的去噪能力,将小波变换理论应用到计算机视觉中,出现了新的基于小波变换的目标检测和跟踪算法[11-13],如文献[11]根据双Haar小波变换良好的去噪特性及边缘保护特性,先对图像进行预处理,去除噪声,边缘增强,并根据小波域的能量特点,得到一个动态的阈值,对图像的背景和目标进行分类,得到检测的目标。虽然不同的小波基都可以达到去噪的目的,但是实验表明[14],双Haar小波不仅算法简单,而且可以给出更好的去噪和图像边缘增强的效果。
为了克服检测目标时系统噪声的影响,同时保证系统的实时性,本文研究了小波域基于聚类分割算法的目标检测系统。由于双Haar小波滤波器组具有良好的边缘检测性能和平滑噪声的能力,本文利用滑动窗口双Haar小波变换和聚类分割算法将背景和目标进行分类,并根据LEE滤波理论,分别推导出低频分量和高频分量的自适应最佳阈值,并通过仿真实验,对阈值的精准性和实时性进行了讨论。
2 小波域目标检测算法设计
2.1 基于滑动窗口的双Haar小波变换算法
双Haar小波是基于两个Haar小波的三通道滤波器组,其分解和重构过程如图1所示。
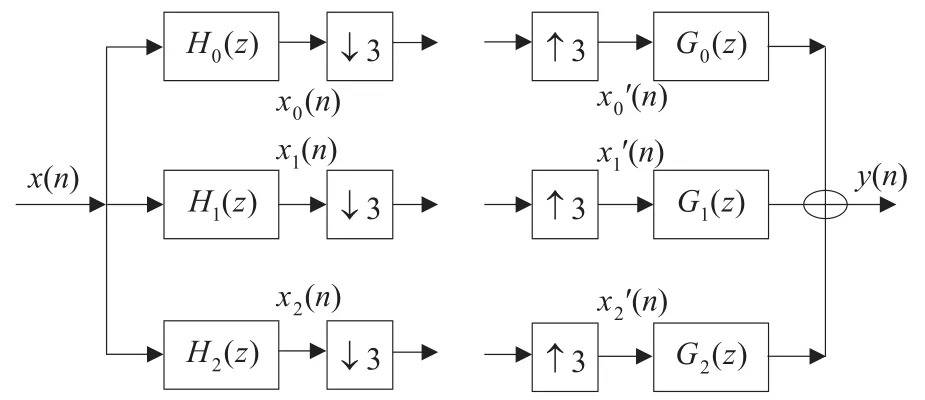
图1 双Haar小波分解和重构过程
根据小波滤波理论[14],小波系数的收缩由下式确定:

小波域基于滑动窗口的算法首先设计一个3×3的滑动窗口,并假设窗口中心的像素为x(i,j),在窗口内应用Lee滤波方法,得到x(i,j)的估计值。然后把该窗口移到相邻的像素,继续估计下一点的像素值。由于图像某点像素和距离它较远的像素相关性很小,因此一个小尺寸的窗口足以完成去噪任务。图2给出了3×3滑动窗口示意图。
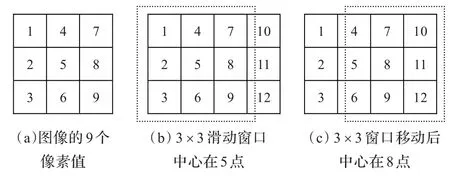
图2 3×3滑动窗口示意图
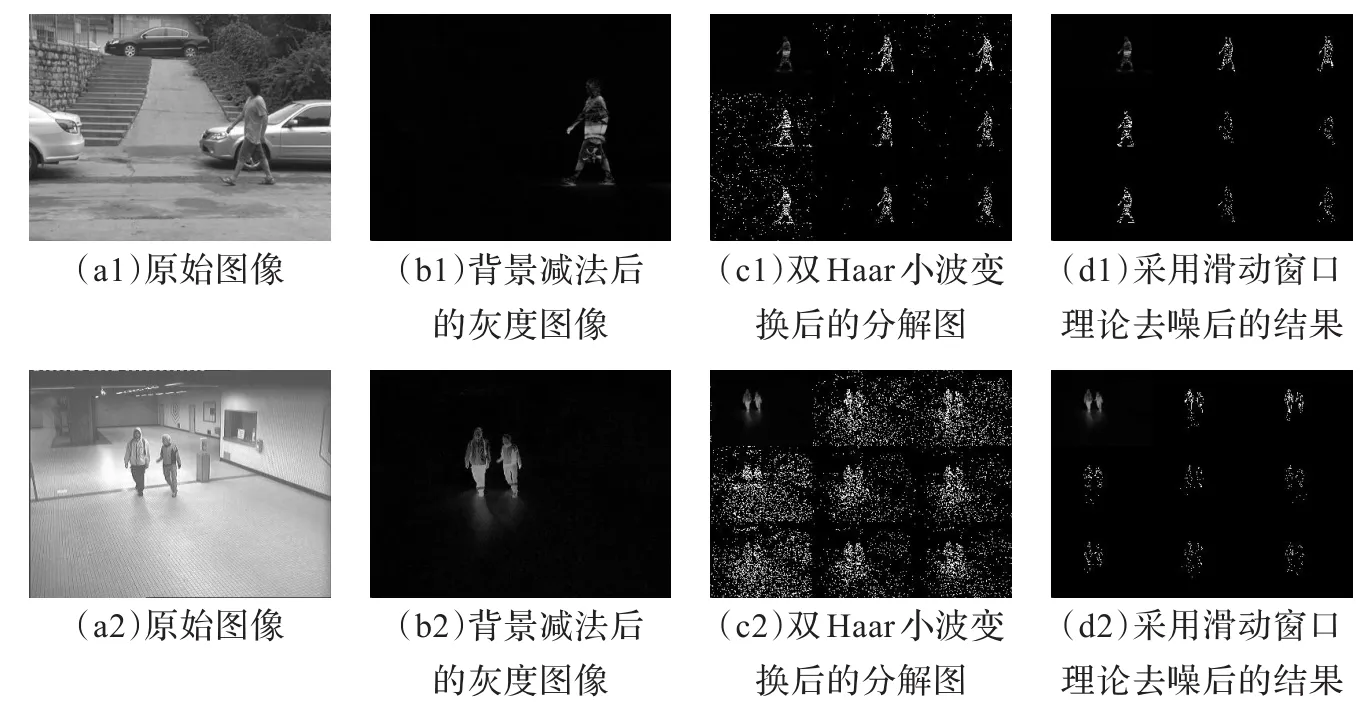
图3 滑动窗口双Haar小波变换去噪后图像
图3分别给出了室外环境下和室内环境下,滑动窗口双Haar小波去噪后的实验结果。其中图(a)为原始图像,(b)为背景减法后的灰度图像,(c)为双Haar小波变换后的分解图像,(d)为采用滑动窗口理论去噪后的结果。从图中可以看出,图像经过滑动窗口双Haar小波处理后,噪声得到良好抑制,可以得到理想的图像效果。
目标检测的任务是将图像或视频中感兴趣的目标检测出来,也就是从背景中分离出目标。由于背景减法后的图像序列中只剩下目标和噪声,去除噪声并选取最佳阈值分离出目标是非常关键的一步。图像经小波变换后,高频分量和低频分量有显著不同,能量主要集中在低频部分,图像的边缘信息和噪声主要集中在高频部分。根据上述分析,在小波域针对高频分量和低频分量的特性,分别选取不同的处理方法,低频部分主要检测目标,高频部分主要去除噪声,根据聚类分割算法和LEE滤波理论,推导出自适应最佳阈值对图像进行判别,就可以得到最优检测结果。
2.2 基于聚类分割的低频分量阈值设置算法
假设图像中包含目标和噪声,门限值将各像素xL(i,j)分为目标CL1和噪声CL2两类[15]。类内方差和类间方差是T的函数:L
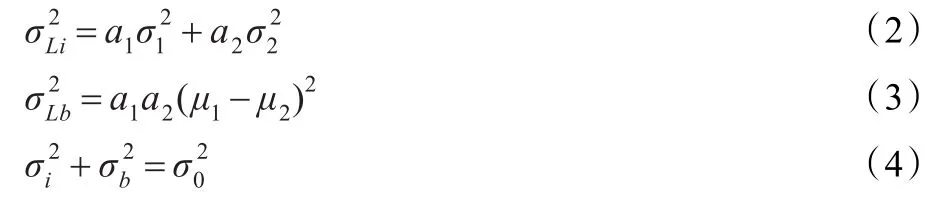
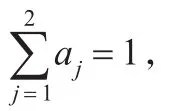

从聚类原理可知,阈值选取的是否恰当直接决定了图像的分类结果。根据小波系数收缩的特性,图像的能量主要集中在低频端,噪声主要集中在高频端,因此,可近似认为μ1=μ0,μ2=0。根据以上假设,可计算出目标和噪声的方差:
其中,N为图像像素数。
根据聚类分割原理,选择最佳阈值使类间方差最大,比较式(7)和式(8)发现,图像的均值μ0是区别目标和噪声的关键因素,μ0越大,越能准确区分目标类CL1和噪声类CL2。因此,选择图像的均值μ0作为最佳判断阈值TLO,即TLO=μ0。
双Haar小波变换的低频分量x0(n)是输入信号经过均值滤波器得到。均值滤波器定义为:

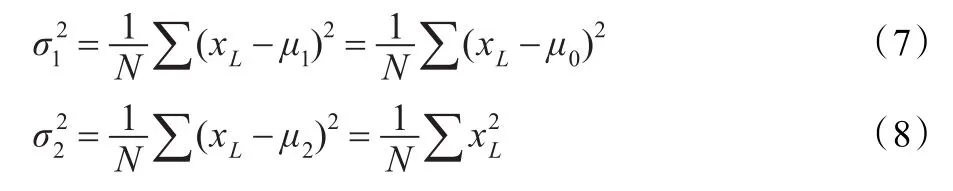
对每个滑动窗口中的9个像素而言,μ0=ya(n)。因此,令聚类分割的最佳阈值TLO=μ0=ya(n),即当滑动窗口中心点的像素值大于TLO时,判该点像素为目标,否则,判为噪声。即低频分量判别后输出为:
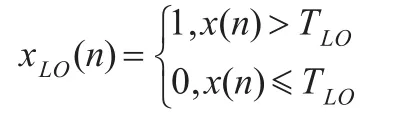
至此,基于聚类分割的低频分量的最佳阈值已经确定,在每个3×3窗口内计算均值ya(n)并作为判别阈值,对滑动窗口双Haar小波变换后的低频成分进行二值化判别检测目标。该阈值计算方法简单,易于实现,可以保障系统的实时性。
2.3 基于LEE滤波的高频分量阈值设置算法
由于图像经过小波变换后,高频分量主要集中了图像的噪声和边缘等细节,因此,在高频端考虑基于去噪处理的阈值设置算法。LEE滤波是一种边缘保持非线性滤波方法,它充分利用了信号的局部统计特性,可以获得较好的滤波效果[16]。
假设待检测图像高频分量中目标用s(x,y)表示,其均值和方差分别为μ和σ2。目标检测系统噪声可近似为零均值、方差为的Gauss白噪声w(x,y),则有:

假设原始目标信号的两个估计分别为:

根据边缘保持混合滤波原理,可以推算出权值K的表达式为:

由于利用均值hˉ(x,y)对s(x,y)进行估计时在边缘处会产生较大误差,为将其影响降低到最小,令b=0。因此,最佳权值K变为:
目标信号的方差σ2可用滑动窗口局部方差σ2(n)代替,而,因此有:

从式(13)发现,最佳权值K从常数变为随窗口位置变化的K(n)。
在实际计算中,图像高频分量观测值h(x,y)的在某个窗口位置处的方差可以直接求出,即

因此,最佳权值K的表达式为:

每个窗口位置处的目标最佳估计为:

由式(15)发现,最佳权值K(n)是决定目标最佳估计值的关键要素,而由式(14)可知,决定K(n)的关键参数是图像噪声方差的大小决定了K(n)的取值。因此,高频分量选择作为最佳门限值进行目标判别。当在图像信号边缘部分时,窗口位置局部方差Q(n)变大,使此时K(n)=1。当在图像信号平坦部分时,局部方差Q(n)变小,,此时K(n)≈0。
目标检测的关键是得到目标的二值化图像,因此,对滑动窗口内双Haar小波变换后的高频分量进行目标分类时,当,判为目标,令小波系数为1。当时,判为噪声,令小波系数为0。即高频分量输出为:

3 小波域目标检测算法实现
上述小波域基于聚类分割的目标检测算法简单,阈值确定算法易于实现,其分析过程可以用以下几个步骤进行描述:
(1)相减:含有运动目标的前景图像和背景图像直接进行点对点相减,得到差分后的灰度图像。该过程数学表达式为:

其中,S(i,j)为差分后的灰度图像,F(i,j)是含有目标的前景图像,B(i,j)为背景图像。
(2)去噪:对图像S(i,j)建立基于3×3滑动窗口的双Haar小波变换模型,低频分量保持不变,高频系数按公式(1)进行收缩,去除噪声影响。
(3)检测:对滑动窗口内去噪后的低频分量进行基于聚类分割算法的判别,高频分量进行基于LEE滤波算法的二值化判别。低频分量输出为:
其中,最佳阈值TLO=ya(n)。
高频分量输出为:
(4)滑动:将3×3窗口滑动至下一位置,继续步骤(2)和(3)的计算过程,得到小波分解后图像的二值化结果。
(5)重构:根据双Haar小波算法进行重构,得到待检测目标的二值化图像。
图4分别给出了室外和室内环境下,按照本文算法进行目标检测的结果。其中图(a)和图(c)为小波域得到的二值化图像,图(b)和图(d)为小波重构后得到的目标检测结果。

图4 小波域目标检测结果
4 实验结果
实验所用视频序列是用SONY广播级摄像机拍摄完成,图像大小为384×288,视频段中,目标出现在不同位置时,系统引入的噪声各不相同。图5给出了室外环境下,同一个视频序列中的3帧图像在时域和小波域分别进行目标检测的实验结果比较。
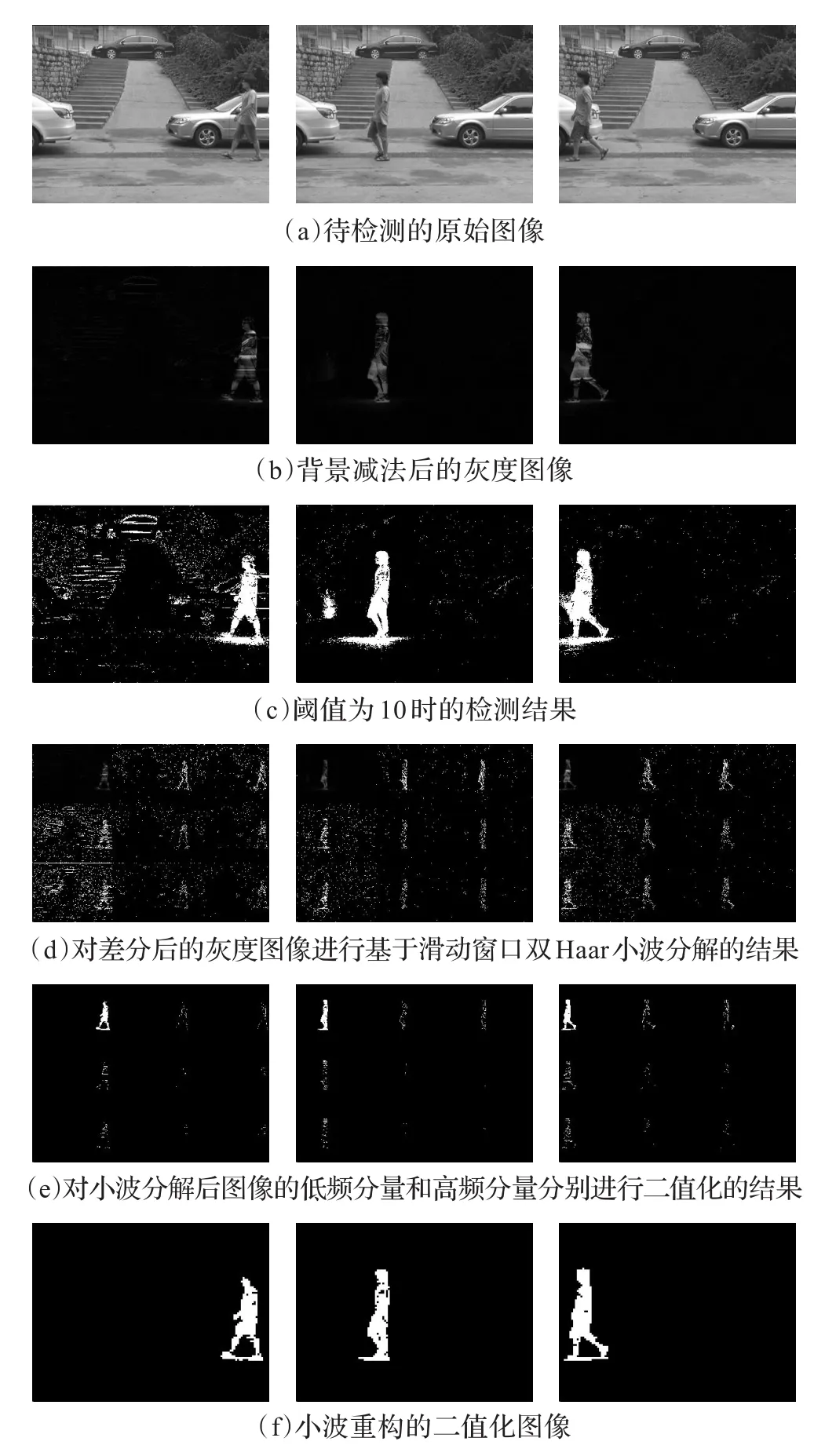
图5 小波域检测结果和时域检测结果比较
图5(a)给出待检测的原始图像。(b)为背景减法后得到的灰度图像。(c)为时域选取阈值为10时的检测结果,可以看出,在同一个视频序列中,目标处在不同的位置时,采用固定阈值法得到的检测结果差别很大,最左边的图像检测结果最差,需要复杂的滤波过程才能得到目标,中间次之,最右边的图像可以得到比较满意的结果。(d)为对差分后的灰度图像进行基于滑动窗口双Haar小波分解的结果,噪声主要集中在高频端,低频端主要包含了目标的能量。(e)为对小波分解后图像的低频分量和高频分量分别进行二值化的结果,在二值化图像中,低频分量起主要作用,占据大部分的能量,而高频部分此时只剩下图像的边缘细节部分,提供了少部分的能量。(f)为小波重构的二值化图像,由于小波去噪后的图像不再受噪声的影响,因此在视频段中,无论目标处在图像的任何位置,都可以得到满意的检测结果。
通过对室内、室外环境下运动目标检测进行仿真实验,进一步验证了在小波域采用基于聚类分割的目标检测算法可以得到理想的检测结果。算法采用双Haar小波变换去除噪声,并把待检测的图像分为低频分量和高频分量,对低频分量进行基于聚类分割算法的阈值确定,对高频分量进行基于LEE滤波的最佳阈值确定。确定阈值算法快速简单,既可以保证系统的实时性又可以保证检测结果的精准性。

表1 不同方法目标检测结果比较
表1给出了本文提出的小波域基于聚类分割的目标检测算法和其他目标检测算法实验结果的比较。为使比较结果更具一般性,分别选择了时域基于贝叶斯准则水平投影优化的目标检测算法[5],和基于双Haar小波变换的运动目标检测算法[11]。通过对室内和室外连续200帧图片进行目标检测的仿真实验,分别给出了单个目标和两个目标情况下,不同方法正确检测出目标帧数的差别。基于贝叶斯准则水平投影优化的目标检测算法的正确检测率可以达到97.1%,但是该算法基于似然函数和贝叶斯最小风险估计,算法相对于其他两种方法复杂,系统实时性相对差些。基于双Haar小波变换的运动目标检测算法正确检测率为95.1%,本文提出的小波域基于聚类分割的目标检测算法检测准确率可达99.6%,同时,该算法推导出的阈值算法简单,判别过程快速,保证了系统的实时性。
由于该算法中用到的阈值是动态的,低频分量和高频分量的检测阈值随着窗口的不同而变化的,使该算法受外界环境的影响较小。但是,由于在进行目标判决时,高频分量有所损失,所以在图像的边缘会出现部分马赛克现象,但是这并不影响目标的检测结果。
5 结论
在对运动目标进行检测时,由于外界各种因素的影响,使图像中存在噪声,从而影响检测结果。由于双Haar小波变换具有良好的去噪特性,因此,利用滑动窗口理论,结合聚类分割算法,通过合理假设,推导出最佳阈值,对小波分解后的低频分量和高频分量分别进行判别,并重构得到待检测的目标。该方法主要有三个优点:一是去噪效果良好,可以保证系统不受系统及外界噪声干扰;二是阈值确定算法简单,系统实时性好;三是检测结果准确。实验表明,该算法在检测目标时可以得到理想的结果。
[1]侯志强,韩崇昭.视觉跟踪技术综述[J].自动化学报,2006,32(4):603-617.
[2]Chen Zhenxue,Liu Chengyun,Chang Faliang.Automatic license plate location and recognition based on feature salience[J]. IEEE Trans on Vehicular Technology,2009,58(7):3781-3785.
[3]黄鑫娟,周洁敏,刘伯扬.自适应混合高斯背景模型的运动目标检测方法[J].计算机应用,2010,30(1):71-74.
[4]唐旭晟,陈丹.基于局部边缘特征的快速目标检测[J].计算机辅助设计与图形学学报,2011,23(11):1903-1907.
[5]刘英霞,常发亮.基于贝叶斯准则水平投影优化的目标检测算法[J].系统仿真学报,2011,33(4):66-70.
[6]苏松志,李绍滋,陈淑媛,等.行人检测技术综述[J].电子学报,2012,40(4):815-819.
[7]李拥军,曾标,徐克付,等.复杂背景下基于贝叶斯全概率联合估计的前景检测[J].电子与信息学报,2012,34(2).
[8]夏双志,戴奉周,刘宏伟.复高斯白噪声背景下贝叶斯检测前跟踪的检测阈值设置方法[J].电子与信息学报,2013,35(3):524-531.
[9]许金金,王敏,吴伟交.基于红外图像的车底藏人检测系统设计[J].计算机工程与应用,2013,49(3):69-73.
[10]李大威,徐立鸿,吴阳,等.一种迭代的核密度估计视觉目标检测算法[J].系统仿真学报,2013,25(3):558-564.
[11]Liu Yingxia,Chang Faliang.Detecting algorithm for object based-double Haar transform[C]//2011 International Workshop on Computer Science for Environmental Engineering and EcoInformatics,2011:442-446.
[12]Sharma M,Kulkarni A,Puntambekar S.Wavelet based adaptive tracking control for uncertain nonlinear systems with input constraints[C]//2009 International Conference on Advances in Recent Technologies in Communication and Computing,2009:694-698.
[13]刘刚,梁晓庚.基于小波变换和管道滤波的红外空中小目标检测[J].计算机工程与应用,2011,47(30):198-201.
[14]Wang Xin.Moving window-based double Haar wavelet transform for image processing[J].IEEE Trans on Image Processing,2006,15(9):2771-2779.
[15]张天序.成像自动目标识别[M].武昌:湖北科学技术出版社,2006:169-174.
[16]王欣,王德隽.离散信号的滤波[M].北京:电子工业出版社,2002:161-165.
LIU Yingxia1,CHANG Faliang2
1.Shandong Communication and Media College,Jinan 250200,China
2.School of Control Science and Engineering,Shandong University,Jinan 250061,China
Because of the contradiction between accuracy and real-time in monitoring system,the object detecting system in wavelet domain based on clustering segmentation algorithm is researched.A method to determine the adaptive threshold for high and low frequency components is presented.The judging criterion and the optimum threshold are deduced.The algorithm can remove the system noise,detect the object fast,and ensure the precision of system.It is proved by simulation and experiment results that the algorithm can detect the object accurately and realize a real-time system.
objects detection;wavelet domain;clustering segmentation;optimum threshold
针对监控系统中目标检测精准性和实时性不能很好兼顾的问题,研究了小波域基于聚类分割算法的目标检测系统,在小波域分别给出了高频成分和低频成分自适应阈值的确定方法,推导出了判决准则和最佳阈值。利用该算法进行目标识别,可以去除系统噪声,快速检测出目标,并能保证系统的精准性。通过仿真实验对该算法进行验证,结果表明,该算法能够准确检测出目标,算法速度快,能保证系统的实时性。
目标检测;小波域;聚类分割;最佳阈值
A
TP317.4
10.3778/j.issn.1002-8331.1305-0080
LIU Yingxia,CHANG Faliang.Moving objects detection algorithm based on clustering segmentation in wavelet domain. Computer Engineering and Applications,2013,49(18):15-19.
国家自然科学基金(No.60975025,No.61273277);山东省高等学校科技计划项目(No.J11LG85,No.J12LN89);教育部留学回国人员科研启动基金资助项目(No.20101174)。
刘英霞(1973—),女,博士,博士后出站,副教授,主要研究方向为模式识别与计算机视觉;常发亮(1965—),男,博士研究生,教授,主要研究方向为模式识别理论与应用。E-mail:liuyingxia228@163.com
2013-05-10
2013-06-28
1002-8331(2013)18-0015-05
CNKI出版日期:2013-07-10 http://www.cnki.net/kcms/detail/11.2127.TP.20130710.1138.001.html