基于霍尔传感器的高精度测速电路设计
2013-07-13程民利
程民利
(西安铁路职业技术学院 电子信息系,陕西 西安 710014)
基于霍尔传感器的高精度测速电路设计
程民利
(西安铁路职业技术学院 电子信息系,陕西 西安 710014)
设计宽范围高精度测速电路;通过对三种常用转速测量方法的分析比较,确定采用M法与M/T法相结合的方法测速,从理论上保证测速的宽范围和高精度;电路设计中为了简单,快速,准确的测速,两种测速方法之间采用硬件切换电路完成,克服了软件切换因工作量大而导致的实时控制变差的缺陷;采用片外计数器8253弥补了8051硬件资源短缺的不足,利用霍尔元件完成转速到旋转脉冲的转换,实现了低成本,高性能。
测速方法;硬件切换;旋转脉冲;时基脉冲;定时计数
在高铁,地铁蓬勃发展的今天,为保证列车安全运行,对列车的运行控制提出了更高的要求。要想安全的控制高速运行的列车,必需精准的检测列车运行的实时速度。
1 测速方法的比较
检测列车运行速度可采取多种方法,其中轮轴转速的检测是检测列车运行速度最常用的方法之一。对旋转装置转速的检测,可采用脉冲计数法。脉冲计数法只要轮轴转动一周,就能产生一个或多个固定脉冲,将旋转脉冲送入微处理器计数,结合软件的运算处理,便可测得转速信息[1]。
脉冲计数法的关键是如何精确的对脉冲计数,常用的方法有3种,分别为M法,T法和M/T法[2]。
1.1 M法测速
M法即测频率法,M法是在规定的时间T内检测旋转脉冲的个数 M1来间接的测量转速[3~5],如图 1(a)所示,转速 N的计算公式为

式中n为轮轴每转动一周产生的脉冲个数。
该计数法的检测时间为定值T,由于检测起止时间的随机性,会导致极端情况下产生±1个旋转脉冲的误差,因此,在转速较高或转动一周产生的旋转脉冲个数较多的情况下,测量精度较高,故M法适用于检测高速旋转的被测对象[3]。
1.2 T法测速
T法即测周期法,T法是测量相邻两个旋转脉冲之间的时间间隔即旋转脉冲的周期,经T法计算间接测得速度的[5]。通常做法是在旋转脉冲的一个周期对已知的高频时基脉冲计数,如图1(b)所示,然后通过式(2)计算可得到被测对象的旋 转 速 度[3,5]。

式(2)中,N为被测对象的转速,n为轮轴每转动一周产生的脉冲个数,f为已知高频脉冲的频率,M2为在一个旋转脉冲周期内包含的高频时基脉冲的个数。
T法测速是在一个旋转脉冲周期内对已知的高频时基脉冲计数,在极端情况下也会产生±1个高频时基脉冲的误差。用T法测速,转速越高,测量误差越大,因此,T法适用于低速检 测[3,5]。
1.3 M/T法
M/T法即在检测时间T内,既测量旋转脉冲的个数M1,又测量已知高频时基脉冲的个数M2,然后通过式(3)计算出被测对象的转速[4]。

M/T法是M法和T法的结合,在测速过程中由于同时对旋转脉冲和高频时基脉冲两种脉冲计数,只要“同时性”处理得当,无论在高速还是低速检测中都有较高的检测精度[3],但该法存在一个检测时间T的合理选择问题,如果检测时间T太小,会出现低速时将速度误测为0,如果T太大,则不能快速的测出速度,影响测速的实时性[5]。
综上所述,M法适合检测高速旋转的被测对象,T法则适合检测低速旋转的被测对象,M/T法集M法和T法的优点于一身,理论上测速范围较宽,但在实际操作中,检测时间T的选择是个难点,检测时间即采样周期T选择,直接影响测速的精度。因此要在宽范围内可靠且精确的测速,避免低速误测为0,可将T法和M/T法相结合,即在低速时采用T法测速,而在中速和高速时采用M/T测速[5]。
2 测速模块设计
2.1 模块组成

图1 不同测速法示意图Fig.1 Schematic plot of different measuring velocity
基于霍尔传感器的高精度、宽范围测速模块如图2所示,测速传感器选择霍尔元件。霍尔元件因具有尺寸小,质量轻,无触点,外围电路简单,频响宽,动态性能好,寿命长,调试方便等诸多优点[2],故选用霍尔元件将轮轴转速转化成一系列的旋转脉冲信号,转速与旋转脉冲信号的个数成正比。
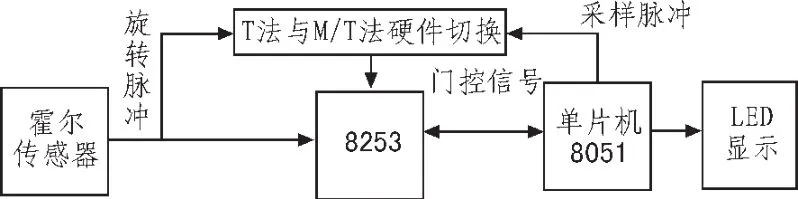
图2 测速模块Fig.2 Modules of measuring velocity
通过对不同的转速脉冲测量方法的比较,确定采用T法与M/T相结合的测速方法,以确保宽范围的高精度测速。T法与M/T法的切换是通过硬件切换电路完成的,硬件切换电路在单片机产生的采样脉冲和霍尔元件产生的旋转脉冲共同作用下,产生用于控制8253中计数器的门控信号,保证中高速时采用M/T法测速,低速时采用T法测速[5],具体电路及原理详见参考文献[5]。
该测速系统需一个定时器产生采样脉冲和高频时基脉冲,需两个计数器分别对高频时基脉冲和旋转脉冲计数,而8051中只有两个定时/计数器,所以本系统扩展了一片8253计数芯片,8051的T0用作定时器,结合循环子程序产生采样脉冲和高频时基脉冲,而8253在8051和硬件切换电路的控制下分别由其0,1两个计数器完成对高频时基脉冲和旋转脉冲的计数功能。
2.2 硬件设计
1)霍尔开关电路
A44E属开关型霍尔元件,其工作电压为4.5~18 V,其输出信号符合TTL电平标准[1],最高测速频率达1 MHz。A44E有3个引脚,第1引脚接电源,第2引脚为接地引脚,第3引脚为输出引脚,霍尔测试电路如图3所示。其3引脚输出的旋转脉冲分别送至硬件切换电路和8253的计数器1的时钟引脚,产生8253的计数器门控信号和计数器1的时钟信号。

图3 霍尔检测电路Fig.3 Detection circuit of Hall sensor
2)硬件切换电路
硬件切换电路的功能是完成两种测量方法之间的自动切换。硬件切换电路的控制关系如图4所示,具体的硬件电路详见参考文献5。在输出采样脉冲的P1.0输出高电平,且有旋转脉冲的上升沿到来,硬件切换电路输出高电平,控制8253的0,1两个计数器的门控端,启动计数器开始计数;当P1.0输出低电平,且有旋转脉冲的上升沿来时,切换电路输出低电平,8253的门控信号无效,停止计数,同时硬件切换电路产生中断请求信号,8051收到中断请求后,读取8253中两个计数器的计数结果,并利用式(3)计算出转速。该电路能保证在低速时测得一个完整的旋转脉冲及这个旋转脉冲周期内的高频时基脉冲个数,8051依然用公式(3)计算速度,只是此时 M1=1,式(3)与式(2)完全相同,采用的是 T 法测量转速。
3)8051对 8253的控制

图4 切换电路Fig.4 Switching circuit

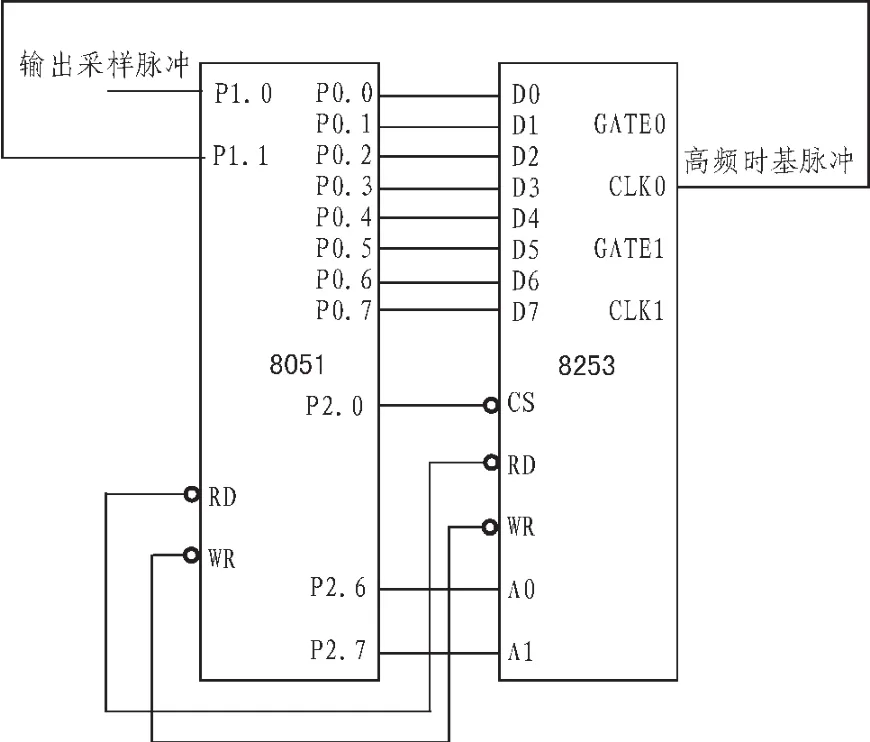
图5 8051对8253的控制Fig.5 Contol of 8051 on 8253
2.3 软件设计
基于8051的片外计数的转速测量流程如图6所示[6-8]。
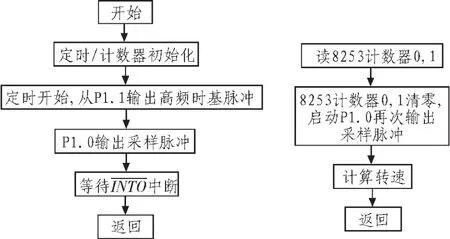
图6 流程图Fig.6 Flow chart
3 结 论
本文所设计的测速系统由于采用了T法和M/T法两种测速方法的结合,避免了M/T法中因测量时间T选择不当引起的低速误测为0或实时性差的问题,从方法上保证宽范围精确测速。测速方法的切换采用了硬件切换,克服了软件切换因软件工作量大而导致的实时控制变差的缺陷[5]。采用霍尔传感器产生旋转脉冲,具有低成本,高性能,抗干扰能力强等优点。
[1]杨继生,刘芬.霍尔传感器A44E[J].电子测量技术,2009,32(10):100-102.
YANG Ji-sheng,LIU Fen.Application study of hal l sensor A44E in cartwheel s resurver[J].Technology of Electronic Measurement,2009,32(10):100-102.
[2]丁芝琴.基于霍尔传感器的电机测速装置设计[J].农机化研究,2010(5):81-83.
DING Zhi-qin.Design of a device which can measure motorvelocity based on hall sensor[J].Study of Agricultural,2010(5):81-83.
[3]赵树磊,谢吉华,刘永锋.基于霍尔传感器的电机测速装置[J].江苏电器,2008(10):53-56.
ZHAO Shu-lei,XIE Ji-hua,LIU Yong-feng.Motor speed measurement device based on hall sensor[J].JIANG Su electrical equipment,2008(10):53-56.
[4]姜庆明,杨旭,甘永梅,等.一种基于光电编码的高精度测速和测加速度方法[J].微计算机信息,2004,20(6):48-49.
JIANG Qing-ming,YANG Xu,GANG Yong-mei,et al.A new way ofmeasuring velocity and acceleratingbased on photoelectric encoder[J].Information of Microcomputer,2004,20(6):48-49.
[5]江明.新型高精度测速方法探讨[J].安徽机电学院,1997,12(3):52-55.
JIANG Ming.Study of a method which can measure velocity high precisely[J].AN Hui electromechanical Institute,1997,12(3):52-55.
[6]张洪润,张亚凡,邓洪敏.传感器原理及应用[M].北京:清华大学出版社,2008.
[7]徐爱钧.单片机原理是用教程[M].北京:电子工业出版社,2009.
[8]邵显涛,陈明,李俊.基于霍尔传感器电机转速的单片机测量[J].电子测试,2008(12):46-48.
SHAO Xian-tao,CHEN Ming,LI Jun.Monolithic microcomputer measuring of a motor rotat ion speed sig nal Based on linear Hall sensor[J].Electronic Testing,2008(12):46-48.
Design of a circuit which can measure velocity high precisely based on hall sensor
CHENG Min-li
(Department of Electronic Information, Xi’an Railway Vocational&Technological Institute, Xi’an 710014, China)
The text design a velocity measurement circuit with high accuracy and adaptability.With the comparison and analysis of three commonly used methods of measuring velocity,the thesis use the combination of M and M/T to measure velocity, thus guarantee the high accuracy and adaptability theoretically.In order to measure the velocity simply, quickly and accurately, the design use switching hardware to transform two above-mentioned methods, and overcome the defect of reduction of quality of real-time control by soft ware switching.The adoption of off-chip counter 8253 make up for the hardware resource shortage of counter 8051.The design use Hall component to achieve the transformation between rotate speed and rotary impulse,and realize low cost and high efficiency.
methods of measuring velocity; hardware switching; rotary impulse; time-base pulse; timer counter
TP212.9
A
1674-6236(2013)08-0109-03
2012-12-05稿件编号201212025
程民利(1965—),女,陕西韩城人,教授。研究方向:电子技术应用,传感技术,电路仿真。