基于Petri网的双层反导拦截指控系统建模分析*
2013-07-11王明哲宋阿妮
汪 超 王明哲 宋阿妮
(1.华中科技大学控制科学与工程系 武汉 430074)(2.湖北工业大学电气与电子工程学院 武汉 430068)
1 引言
随着军事信息化程度的不断提高,导弹防御系统部署正向着网络化方向发展,多层拦截、海陆一体化成为反导拦截指挥控制(C2:Command and Control)建设的中心议题[1~2]。本文以Petri网为工具,研究探讨Petri网结构分析理论在弹道导弹双层拦截中的应用。通过网络化双层拦截任务和C2操作流程的建模分析,凸显Petri网结构建模和指控操作结构分析在导弹拦截系统顶层设计中的重要作用。
Petri网是在1962年由德国科学家Carl A Petri博士首先提出并受到广泛关注,已经成为复杂系统建模和分析的一个重要工具。它提供了面向系统事件结构的分析方法,如S不变量、T不变量和状态图、进程网等描述功能,能方便展现C2操作进程或作战事件顺序、并发、冲突以及同步等逻辑关系[3]。
2 拦截系统C2操作流程建模
面对电子对抗、隐身、多诱饵、弹头加固、多弹头等多重威胁[4],双层乃至多层拦截系统已经成为国家导弹防御系统建设的必然发展趋势。本文选用美军地基、海基双层拦截系统的指挥控制(C2)作战流程为研究对象:执行预警卫星、早期预警雷达(P波段)、跟踪制导雷达(X波段)、地基拦截弹(GBI)中段拦截指控任务的C2BMC和用于海基“宙斯盾”系统的多功能舰载雷达、舰载拦截弹和舰上指挥中心(C2)构成的双层拦截C2作战流程。
地基中段拦截系统[5,7]的GBI的最大飞行高度可达2000km,GBI上动能弹头(EKV)的探测距离可达800km,通过C2BMC构成整个防御系统闭环控制,完成威胁评估与拦截效果测定,实现多层拦截指挥、协调、监视和控制。作战流程如图1所示。
“宙斯盾”系统的拦截距离为500km~1200km,拦截高度为80~500km,LEAP红外探头的探测距离约为300km[6]。舰载指控中心执行二次拦截C2操作,控制多层反导拦截过程,其独立作战时C2流程如图2所示。
就拦截指控系统而言,C2作战流程大体相同,遵循着:态势感知→态势评价→指挥决策的主流程[5]。差异之处在于地基拦截系统需要由C2BMC控制不同传感器交接班,接力搜索截获跟踪目标,而“宙斯盾”拦截系统则由一部相控阵雷达完成目标捕获和跟踪,海基拦截弹采用TVM制导,一直需要舰载雷达、指控系统和拦截弹构成完整实时闭环系统,通过雷达照射完成海基拦截任务。
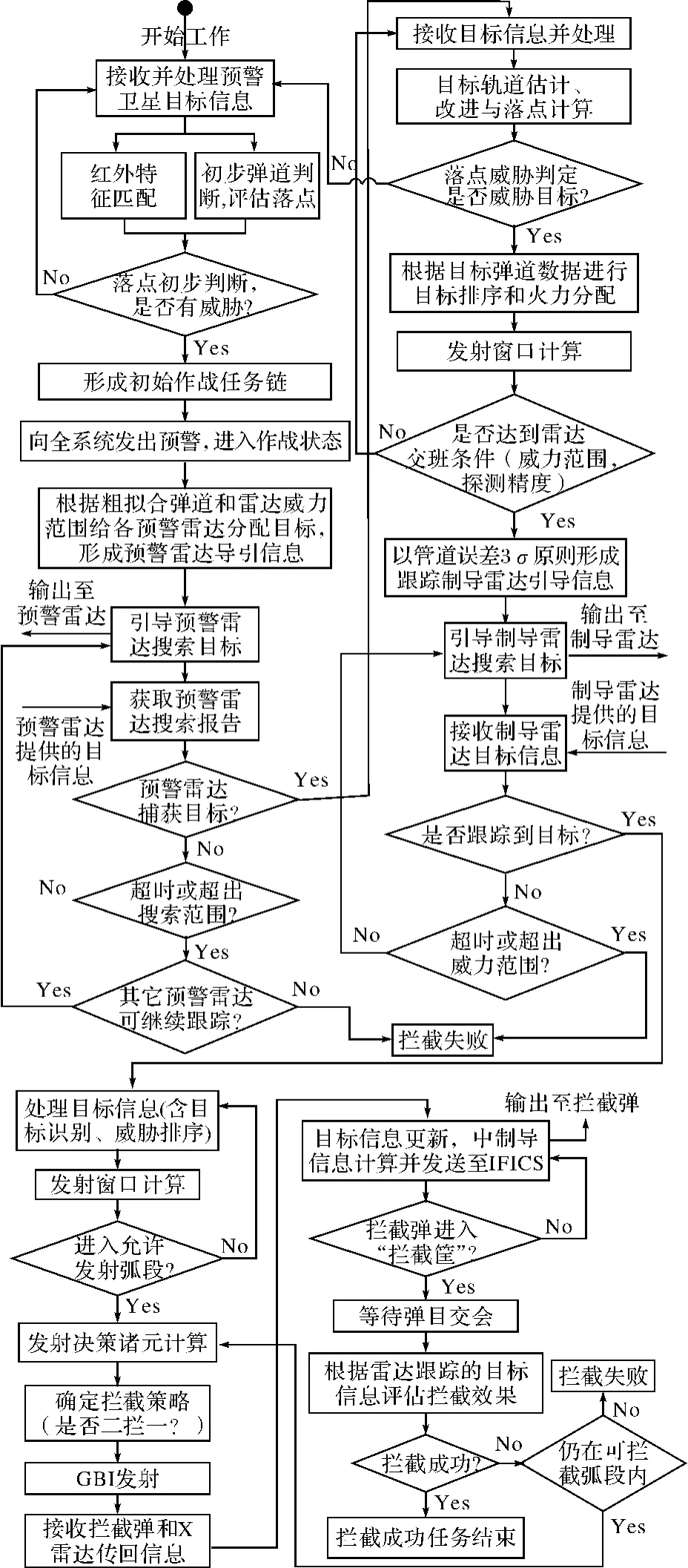
图1 地基中段拦截系统C2作战流程
相似的C2作战流程和互补的威力范围为网络化地基、海基中段双层拦截系统构成奠定了基础,另外从拦截时序上考虑,以一个拦截一枚8000km射程的洲际弹道导弹为例,从导弹发射到最后一级火箭关机大概100s,整个弹道飞行时间大概为2100s,这样整个拦截指挥的时间为2000s,根据相关资料可知,从弹道导弹发射到预警卫星和预警雷达传回导弹关机点和大致弹道及落点到指挥控制中心大概要5min,而指挥控制中心处理各传感器信息到引导X波段雷达跟踪制导目标,引导GBI发射大概要5~7min,而从GBI发射到整个拦截过程结束大概要10min,第一层拦截失败后,留给第二次拦截的时间并不多;另外由于GBI的成本较高,且部署数量有限,第一次拦截失败后,目标已接近或达到海基拦截系统的威力范围,出于拦截时间限制和成本考虑,地基中段拦截系统第一次拦截失败后,可以考虑将数据移交到“宙斯盾”拦截系统,将其作为地基中段拦截系统第二次拦截的替代,组成一体化反导拦截系统。
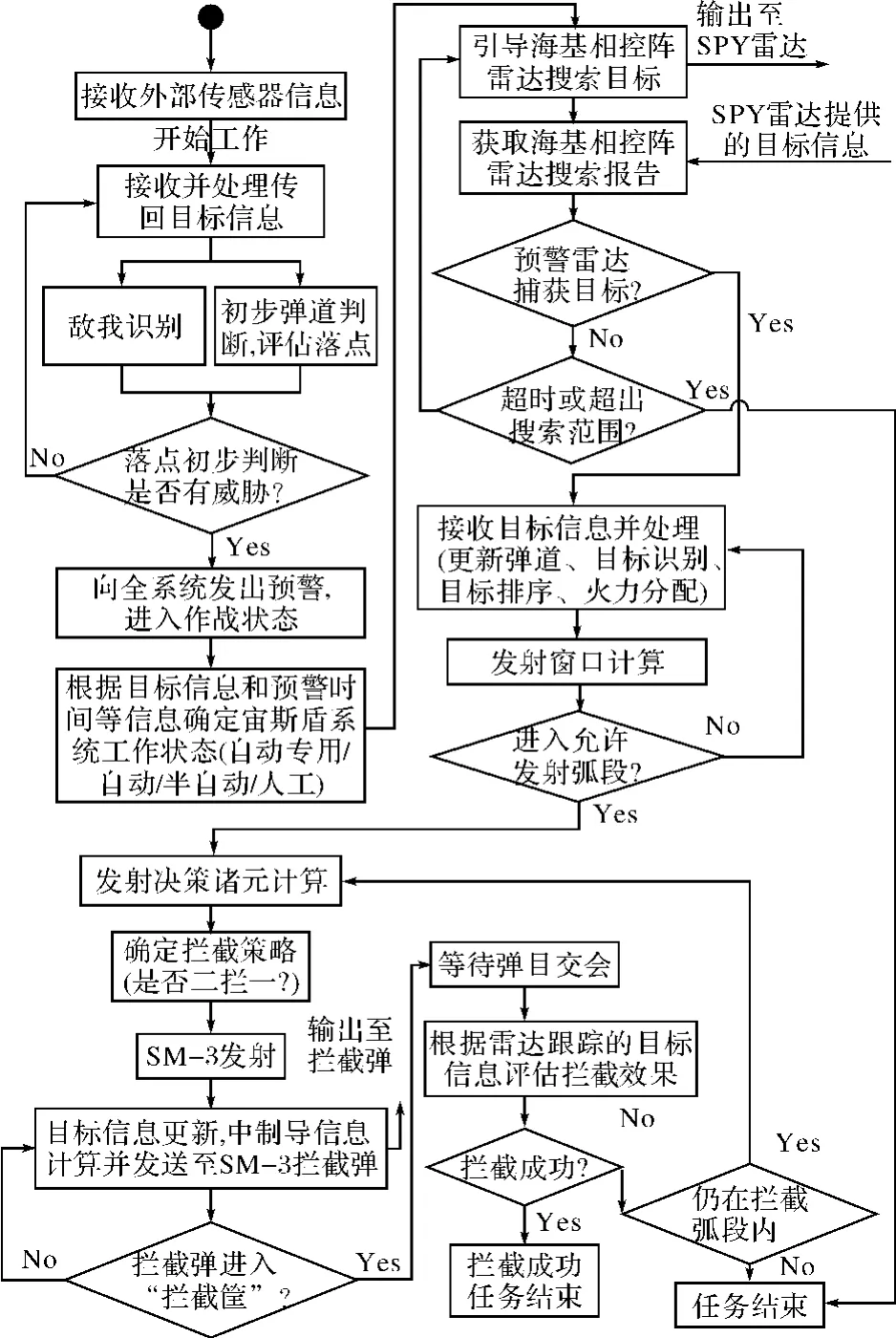
图2 “宙斯盾”拦截系统C2作战流程
3 Petri网C2流程建模
回顾Petri网建模的基础概念如下[3,8]:
定义1:基本Petri网系统由四元组PN=(P,T,I,O)组成,其中:P是有限库所(Place)集合;T是有限变迁(Transition)集合,P∩T=φ;I是库所到变迁的有向弧(Arc)集合,I⊆P×T;O是变迁到库所的有向弧集合,O⊆T×P。
定义2:在一个Petri网PN=(P,T,I,O)中,库所集P1⊆P,若*P1⊆P1*,则称P1为网PN的一个Siphon结构(虹吸);若P1*⊆*P1,则称P1为网PN的一个Trap结构(陷阱)。
定义3:设网N=(B,E,F)对应一个Petri网的基本结构und(PN)=(B,E,F),如果满足以下条件:
1)任意b∈B:|*b1|≤1∧|b1*|≤1,
2)任意x,y∈B∪E:(x,y)∈F+→(y,x)∉F+,其中F+为流关系F的传递闭包,则称N=(B,E,F)为该Petri网PN的一个进程网。
3.1 C2BMC系统Petri网模型
用库所来表示资源、信息、条件等系统状态,变迁来表示作战活动和C2操作事件,建立地基中段拦截指控系统作战流程的Petri网模型如图3所示。

图3 地基拦截C2系统Petri网模型
图中P1、P3、P6、P12、P16表示资源库所,分别对应预警卫星、C2BMC、预警雷达、跟踪制导雷达、GBI(地基拦截弹),它们提供作战功能实现,有“0”和“1”两种状态,分别表示“忙”和“闲”。当库所状态为“1”时,其后置变迁才有可能被触发。
图3系统模型中有五个S不变量,都有明确的物理含义。例如,由 [P3,P4,P5,P7,P8,P9,P10,P11,P13,P15,P17,P19,P20,P21,P22,P23]S不变量支撑展示了从信息接收,信息处理到引导预警雷达和跟踪制导雷达搜索跟踪目标到控制GBI的发射和中制导,再到拦截评估的表明整个C2BMC操作流程是信息守恒的。
该C2模型中有四个T不变量,展示的作战事件路径如下:
T1:T5→T6引导P雷达搜索目标→失跟未超时,表示C2BMC引导P雷达重搜的过程;
T2:T5→T8→T9引导P雷达搜索目标→搜索超时→其他预警雷达能跟踪,表示C2BMC引导其他P雷达重搜的过程;
T3:T12→T13引导X雷达搜索跟踪目标→失跟未超时,表示引导X雷达重搜的过程;
T4:T16→T17→T18→T19→T20→T22引导GBI发射→信息处理→评估拦截结果→判定拦截失败→进行第二次拦截,表示C2BMC引导GBI二次拦截的过程。
T不变量明确了拦截C2作战流程中的循环过程。由于应用了资源库所,并且系统中存在源库所和汇库所,经分析发现网结构中存在一些Siphon和Trap结构,但这是因为应用了资源库所,并且系统中存在源库所和汇库所的缘故,所以存在Siphon和Trap结构并不影响整个C2操作和资源流动的畅通有效。
3.2 “宙斯盾”C2系统Petri网模型
宙斯盾C2系统的Petri网模型如图4所示。

图4 “宙斯盾”C2系统Petri网模型
图4中P1、P2、P5、P13表示的资源库所分别对应海基中段拦截系统的上级指示、指控系统、海基相控阵雷达和海基拦截弹。分析知该Petri网的S不变量有五条,都具有相应的物理意义,例如,由[P2,P3,P5,P6,P7,P8,P10,P13,P14,P15,P16,P17,P18,P19]不变量支撑展示了海基拦截指控系统中,从信息接收、信息处理到引导海基相控阵雷达搜索跟踪目标到控制海基拦截弹的发射和中制导、末段控制照射雷达照射目标再到拦截评估,整个事件流是信息守恒的。
该C2模型中有四个T不变量,展示的作战事件路径如下:
T1:T3→T4,失跟未超时→引导海基相控阵雷达搜索跟踪目标,表示海基指控系统引导海基雷达重搜的过程。
T2:T9→T10→T11→T12→T13→T14→T16,引导海基拦截弹发射→信息处理→引导海基拦截弹中段飞行→末段引导照射雷达工作→海基拦截弹末段飞行→评估拦截结果→拦截失败进行第二次拦截,表示海基指控系统引导海基拦截弹二次拦截的过程。
上述两条T不变量表示海基拦截指控系统作战流程中的循环过程,与上述作战流程图中标识的一致,说明了所建立的Petri网是可靠的。
该C2模型中,因为存在源库所和汇库所,所以存在Siphon和Trap结构,但并不影响该C2系统作战事件和资源流的畅通性和有效性。
4 双层拦截C2系统建模分析
按照双层拦截指控一体化的设想[4,7,9~10],分析地基中段拦截C2系统和海基中段拦截C2系统的Petri网模型逻辑进程异同性,得到双层拦截C2系统的作战流程Petri网模型如图5所示。

图5 双层拦截C2系统Petri网工作流模型
系统的S不变量有九条,选择有代表性的S不变量支撑结构:[P3,P4,P5,P7,P8,P10,P11,P13,P14,P20,P21,P22,P23,P24,P26,P27,P29,P30,P31,P33,P40,P41],表明了C2BMC操作从接收、处理信息到引导预警雷达和跟踪制导雷达搜索跟踪目标,再到控制GBI的发射和中制导,以及拦截评估,引导第二层拦截的整个事件操作信息守恒性。
一体化C2模型中有四个T不变量,展示的作战事件路径有:
T1:T5→T6引导P雷达搜索目标→P雷达失跟且未超时;
T2:T5→T7→T9引导P雷达搜索目标→P雷达搜索超时→其他预警雷达能跟踪;
T3:T12→T13引导X雷达搜索跟踪目标→X雷达失跟且未超时;
T4:T26→T27引导海基相控阵雷达搜索跟踪目标→海基雷达失跟且未超时。
T1~T4展示了双层拦截C2作战流程中的循环过程。比较两独立C2系统的T不变量,各雷达重搜循环结构相同,但两个系统进行第二次拦截的循环结构失去,实现双层拦截指控一体化。
一体化C2模型中的各种汇库所,是一个Trap结构;同样,由于存在资源库所,一体化C2有Siphon结构,但并不影响整个双层拦截一体化C2的流程和信息流的可行性;双层拦截指控一体减少了多次拦截的循环,减少了Trap结构的数量,提升了C2操作的有效性构造。
以预警卫星报告且双层拦截各系统准备就绪为初始状态,初始标识为 M0(P1,P3,P6,P12,P16,P25,P28,P34),并将顺序触发的变迁放在一起和串并联合的网模型简化方式[14],得到该初始想定下的双层拦截指控系统的进程网如图6所示,限于篇幅,图6中仅列出了双层拦截C2系统Petri网中几个具有代表性的进程。
通过分析系统的逻辑结构,各进程的物理意义为:进程1表示一体化C2成功引导预警雷达和跟踪制导雷达跟踪到目标,发射GBI后,判定拦截失败,引导海基拦截系统成功发射拦截弹,获取拦截结果;进程2表示一体化C2引导地基预警雷达和海基雷达探测目标均失败后,拦截任务结束;进程3表示一体化C2引导地基预警雷达重新搜索目标成功,引导GBI发射并拦截成功;进程4表示一体化C2引导跟踪制导雷达探测目标失败后,成功引导海基拦截弹发射获得拦截结果。
通过进程网路径事件的顺序、并发和同步分析,可以进一步获得两层拦截系统协同拦截一体化构成。C2系统的基本结构和并发流程增进了双层拦截协同C2的第一层地基中段拦截C2系统的作战流程强壮性,例如可以在地基中段系统雷达探测失败后,进行补充拦截;也可以在第一层GBI拦截失败后,将上一层数据传递到海基中段拦截系统进行拦截。应用Petri网结构化分析方法,海基中段拦截系统和地基中段拦截C2系统一体化结构模型能有效验证网络化反导多层拦截指控操作可行性和有效性。
5 结语
本文通过分析地基中段拦截系统和海基“宙斯盾”拦截系统的组成结构,以及其中C2系统的作战流程,采用Petri网技术分析了C2系统的关键事件流和系统逻辑结构,阐述了一体化C2构想的合理性。通过Petri网结构验证,建立一体化多层拦截指控系统可能有效途径,为更好地了解和改进反导指控流程提供了借鉴,为网络化反导系统结构化分析提供了一个可行的研究途径。
本文主要从结构上定性分析了双层拦截指控一体化设想的合理性,如何对多层拦截C2系统进行定量化分析,还有一体化指控资源调度策略和跨平台C2系统间替代方法, 以及之后的评价方法将是今后研究的重点。

图6 双层拦截C2系统进程网
[1]戴志平,许同和,赵国林.信息化条件下的网络中心战[M].北京:军事谊文出版社,2010:8-14.
[2]David S.Alberts,John J.Garstka,Frederick P.Stein.Network Centric Warfare:Developing and Leveraging Information Superiority,2ndEdition(Revised)[M].Washington.CCRP Publication Series,2001:1-58.
[3]吴哲辉.Petri网导论[M].北京:机械工业出版社,2006:1-244.
[4]朱祝华,王毅增.区域反导指控系统一体化研究[J].火力与指挥控制,2009,34(11):1-4.
[5]金圣彪.美国弹道导弹防御系统的发展现状及趋势[J].导弹与航天运载技术,2009,33(5):57-61.
[6]王春峰,朱保魁,刘正茂,等.“星光闪耀”的标准导弹[J].飞航导弹,2008(10):27-28.
[7]王煜.美国国家导弹防御系统(NMD)的指挥、控制和通信系统[J].无线电工程,2003,33(12):34-36.
[8]Jensen K.Application of colored petri nets in system development[M].Berlin:Springer Press,2004:1-98.
[9]毛昭军,李云芝.网络化防空反导体系一体化火力控制问题[J].火力与指挥控制,2008,33(6):5-9.
[10]羊彦,徐琰珂,景占荣,等.战区弹道导弹多层拦截方法[J].火力与指挥控制,2007,32(12):76-78.
[11]栾孝丰,温瑞.基于UML和ADC法的舰载反舰导弹武器系统效能评估[J].计算机与数字工程,2010(8).
[12]肖支才,程春华.基于改进遗传算法的反舰导弹协同任务规划[J].计算机与数字工程,2010(5).
[13]刘博,刘作学,盛懿君,等.指挥自动化系统的系统动力学建模与分析[J].计算机与数字工程,2012(12).
[14]周从华,刘志锋.基于Petri网的工作流模型简化[J].计算机科学,2008,35(2):115-119.