变电站巡检机器人电源系统研究
2013-07-07王仕荣孙大庆王贤华
杨 墨 王仕荣 孙大庆 王贤华
(1.山东省电力特种机器人工程实验室,山东 济南 250101;2.山东鲁能智能技术有限公司,山东 济南 250101;3.云南电网公司大理供电局,云南 大理 671000)
0 引言
变电站运规要求运行人员进行日常巡检工作,每天或定期采集大量的运行数据。这种人工方式存在劳动强度大,容易使人产生厌烦,检测质量分散,主观因素多,巡检不到位难以监控,巡检结果数字化不便等缺陷,不符合智能电网的发展方向[1-3]。为了解决这个问题,兼顾变电站的运行方式,变电站巡检机器人部分替代人工巡检已经成为一种趋势。变电站巡检机器人采用自主或遥控方式,通过红外热像仪对电气设备、设备连接处和电力线路进行温度检测;使用可见光摄像机对运行设备的外观异常和线路中悬挂的异物进行识别检测;通过分析拾音器采集回来的设备声音,确定设备的运行情况。巡检机器人后台系统对巡检数据进行对比和趋势分析,及时发现电网运行的事故隐患和故障先兆,如:异物、损伤、发热、漏油等。巡检机器人为提高变电站的数字化程度和全方位监控的自动化水平,确保设备安全可靠运行发挥了重要作用。
电源系统是为巡检机器人提供动力的心脏部分,电源系统是否正常工作直接影响到机器人内部设备的稳定运行。巡检机器人要在变电站长期值守、完全自治,就必须配备一套自动化水平高、稳定性强的电源系统。本文提出一种状态监测全面,自动化程度较高,交互性好,实用性强,适用于巡检机器人长期自主运行的电源系统。该系统全面监测电压、电流、电量及温度,具有过放、过充、欠压等多重保护,实现机器人内部温度自动调节及电池自动充电,非易失性存储命令执行及异常发生时的状态,能够满足变电站巡检机器人的功能需求。本文详细论述了其功能结构及工作原理,并给出了部分电路原理图。
1 系统设计
变电站巡检机器人电源系统功能结构如图1所示。电源系统以单片机为核心,通过外围接口和驱动控制等电路实现状态检测、电源输出及充电过程控制、信息交互等功能。通过串口通信实现与工控机命令执行及状态反馈的交互。通过检测芯片监测电压、电流、电量及温度等信息,实现机器人运行状态的实时监控。保护电池和电路安全,包括对电池过放、过充保护,过流、过压保护和电路短路、浪涌保护等。当检测到电池电压过低时,电源系统上传告警信息并自动切断电池供电,从而防止电池过放。当检测到电池充电电量超过预定饱和值时,电源系统自动停止电池充电,从而防止电池过充,综合运用各种措施保证电池使用安全,延长电池使用寿命。电源系统控制充电机构实现自动充电,通过驱动电路控制继电器组实现电池充电、供电切换和设备电源单独控制。为了便于后续检查机器人运行状态,分析机器人运行故障,以事项形式存储命令执行和异常发生时的电源状态。控制散热风扇和电加热板使机器人本体内部温度达到电池及设备工作的适宜温度[4]。电源模块根据设备电压等级及功率要求,转换分配为各支路电源输出。指示灯显示电源系统通信、电量及支路电源等状态。
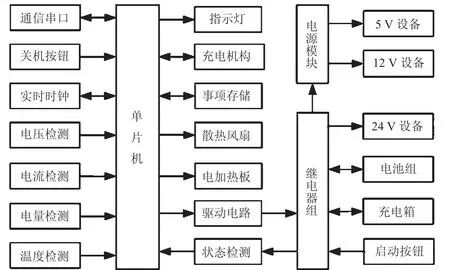
图1 电源系统功能结构图
2 功能模块设计
2.1 电池选型
巡检机器人的移动属性决定其适合采用无缆化的电池供电。电池的选用通常需要考虑如下几个因素:(1)电压等级:决定了机器人内部设备的电压适用范围;(2)电池容量:决定了机器人的工作时间和续航能力;(3)尺寸和重量:在某种程度上决定了机器人本体的尺寸和重量。根据变电站巡检任务的工作量,设计变电站巡检机器人最高速度为1.5 m/s,连续工作时间最长为3 h。根据机器人内部设备电压及功耗,计算出机器人静态工作电流2 A,动态工作电流4 A,最大工作电流10A,考虑电池裕量及衰减,机器人内部空间有限及移动设备自重不宜过重等限制,本文选用额定电压25.2 V,容量50Ah的三元锂电池组。三元聚合物锂电池能量密度大,重量是相同容量的镍镉或镍氢电池的一半,体积是镍镉的40%~50%,镍氢的20%~30%。单体电压高,自放电小,每月在10%以下。没有记忆效应,循环寿命高,在正常条件下,锂离子电池的充放电周期可超过500次。工作温度范围宽至-20~60℃。循环性能优越,可快速充放电,充电效率高达100%,不含有诸如镉、铅、汞等有害金属物质,对环境无污染。
2.2 电源状态监测
电源状态监测是电源系统的基本功能,主要包括对电池组总电压、电流、电量及温度等基本信息的采集。通过监测电池组的实时状态,实现对电池组的有效控制,提高电池使用安全及效率,延长电池使用寿命[5]。
2.2.1 电压、电流、电量检测
DS2438是美信公司推出的单总线智能电池监测芯片,具有体积小、硬件接线简单等优点,便于对电池组运行状态进行监测[6]。本文应用DS2438检测电源状态的原理图如图2所示。DS2438的Vad为电压输入端,DQ为数据读写端。DS2438片内集成有10位A/D转换器,测量范围是0~10V,分辨率为10mV。经过采样电阻分压和仪表放大器AD620阻抗匹配后,DS2438可以检测机器人电池、充电器及外供电源的电压值[7]。Vsens+、Vsens-为DS2438的电流输入端。通过测量采样电阻R2的两端电压,并将测量的电压值送至DS2438的电流寄存器,间接测量电池的输出电流或充电电流。电池电流等于电流寄存器中的值/(4096*Rsens),Rsens为采样电阻的阻值。DS2438利用集成电流累加器(ICA,Integrated Current Accumulator)对电池剩余电量进行跟踪。ICA保存着流经电池的总电流,通过与初始电量对比后,就可以得到电池的剩余电量。ICA寄存器存储空间有限,跟踪大容量电池组的剩余电量不够用。可以使用外部非易失性存储器扩展存储空间,提高DS2438跟踪剩余电量的适用范围。
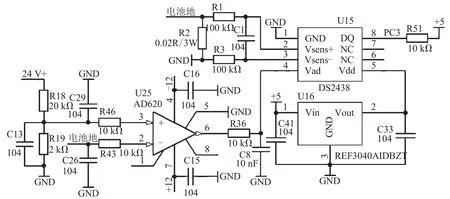
图2 电压、电流及电量检测原理图
2.2.2 温度检测
工作温度是机器人电池组的重要参数,在判断电池的安全性及效率等方面具有重要作用。温度在电池工作过程中一直都存在变化,所以要实时采集温度参数,防止过热影响电池使用的安全、效率及寿命。而且在电池发生故障时,经常伴有温度异常。通过监测电池温度,可以尽早发现电池故障,及时更换,避免机器人运行故障,预防安全事故。本文采用美国达拉斯半导体公司的单总线数字温度传感器DS18B20采集系统温度参数,其具有微型化、低功耗、易使用、抗干扰能力强等特点。
2.3 自动充电
机器人电池容量有限,一旦电池电量不足,必须及时充电。如果人工充电,机器人就无法实现完全自主运行,所以自动充电是机器人电源系统的核心功能之一。变电站巡检机器人充电点定位采用磁轨道引导,RFID标签定位,导航定位精度较高。侧向充电对接装置如图3所示,由充电座(图中1~4)和充电机构(图中5~14)两部分组成[8-9]。机器人通过电机驱动板控制充电机构电机转动,电机通过齿轮齿条与传动丝杠配合,实现充电机构的伸出或收回,进而实现充电机构极片与充电座极片夹的电气连接,简单可靠。充电机构上设有3个限位开关用于检测充电机构位置。机器人在充电机构伸出过程中,实时检测极片电压是否正常,若检测到正常,则停止伸出充电机构,准备充电。若充电机构伸出到极限位置后,仍然检测极片电压异常,则进行异常报警并重试。经实验,极片夹水平面上有±15°、±10cm的误差容忍度。用弹片压紧极片夹后,垂直方向也有±2 cm的误差容忍度。目前已有的对接系统一般允许的水平对接误差为±5°、±5 cm。
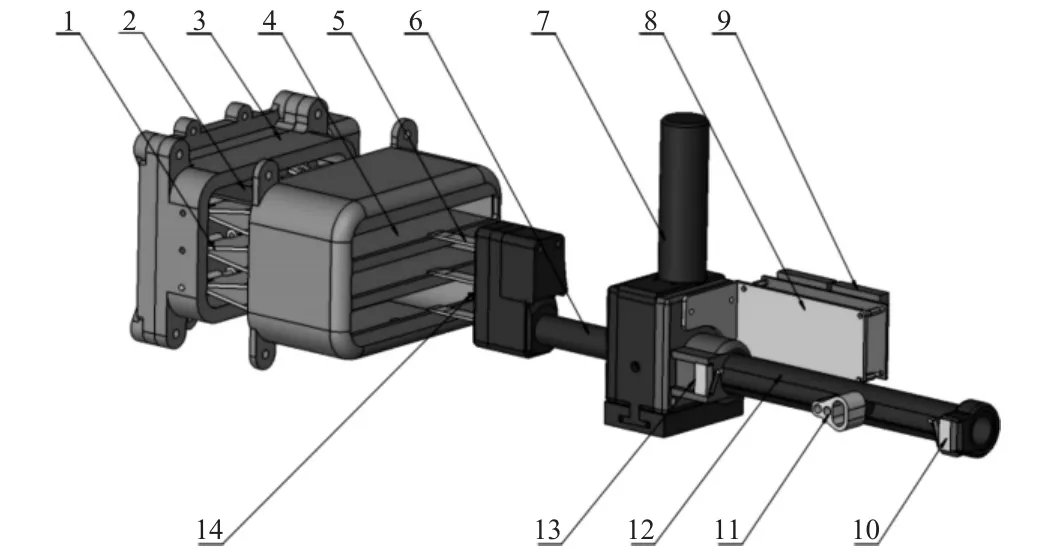
图3 接触式侧向充电对接装置结构图
2.4 实时时钟及事项存储
为了便于后续检查机器人运行状态,分析机器人运行故障,以事项形式非易失性存储命令执行和异常发生时的电源状态。状态信息主要包括:精确到秒的时间标签、电源状态标志、告警标志、继电器状态、电池充放电电流、外部供电电流、电池启动电压、外部供电电压、电池电压、充电器电压、温度信息等。每条事项记录占22个字节,除状态信息外,还包括帧同步、命令字、执行状态、记录总数、事项召唤的起始地址及召唤个数等。集成器件FM31256可以非易失性存储几百条历史事项,为分析问题、排除故障发挥重要作用。FM31256应用原理图如图4所示。FM31256采用I2C接口,内部具有256 kb的串行非易失性存储器[10],擦写次数无限次,功耗低。片内实时时钟以BCD(Binary-Coded Decimal,二-十进制代码)格式提供时间和日期信息,可以通过外部电池或电容供电防止掉电丢失,还可以用软件校准模式提高时间记录器的精确性。另外,FM31256片内有早期电源失效报警模块,PFI引脚电压与1.2 V参考电压进行比较,当PFI输入电压低于该阈值时,PFO引脚输出低电平。PFI信号上升时,比较器有100mV(最大)的滞后以降低噪声灵敏度,PFI的下降沿没有滞后。PFO输出可以作为系统判断电池电压的重要依据之一。
3 结语
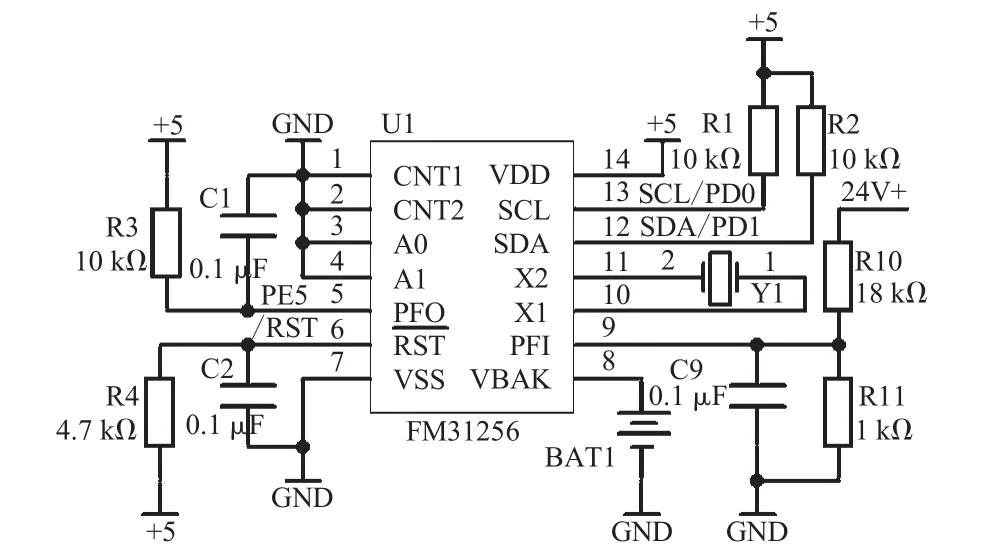
图4 FM31256应用原理图
变电站巡检机器人部分替代人工巡检已经成为一种必然趋势。机器人长期无人化自动巡检,为电网安全稳定运行发挥了重要作用。本文提出了一种应用于变电站巡检机器人的电源系统,对机器人全面监测电压、电流、电量及温度,全面记录历史事项信息,具有过放、过充、欠压等多重保护,实现机器人内部温度自动调节及电池自动充电。该系统状态监测全面,自动化程度较高,交互性好,实用性强,适用于巡检机器人长期自主运行。该系统已经成功应用于山东青岛午山220kV、浙江金华兰溪500kV、山西长治1000kV等全国10多个省市的智能变电站,顺利投运30余台。本文提出的电源系统能够满足变电站巡检机器人的功能需求,并已经在工程现场验证了良好的安全性和稳定性,运行效果良好,应用前景广阔。
[1]毛琛琳,张功望,刘毅.智能机器人巡检系统在变电站中的应用[J].电网与清洁能源,2009,25(9):30~32
[2]郝登朴,卫宁,贠鹏,等.500kV变电站智能巡检系统关键技术的应用[J].电力学报,2009,24(6):509~511
[3]孙大庆,杨墨,韩磊,等.变电站巡检机器人电源系统[P].中国专利:202167880,2012-03-14
[4]李卫国,渠展展,石海鹏,等.一种用于变电站巡视机器人的电池智能管理系统[P].中国专利:102170146,2011-08-31
[5]沈超.水下机器人锂电池管理系统研究[M].哈尔滨工程大学,2011
[6]严加朋,王大志,金有超.基于DS2438的大功率蓄电池状态检测[J].单片机及嵌入式系统应用,2011(3):40~42
[7]刘丞,赵建.用于智能移动机器人的电源模块设计与实现[J].仪表技术,2009(2):67~70
[8]毛立民,吕勤.移动机器人多功能电源的设计及应用[J].制造技术与机床,2009(3):66~69
[9]曹涛,孙大庆,王明瑞,等.充电机构限位止停机构[P].中国专利:201392876,2010-01-27
[10]李娜,孙百生.铁电存储器在智能仪表中的应用[J].仪表技术,2008(3):35~37
