电液振动台加速度波形再现控制算法
2013-07-07于浩洋关广丰于笑平辛宗生
于浩洋,关广丰,于笑平,秦 杰,辛宗生
(1.黑龙江工程学院 电气与信息学院,黑龙江 哈尔滨150050;2.大连海事大学 机械工程系,辽宁 大连116026;3.黑龙江工程学院 后勤服务总公司,黑龙江 哈尔滨150050;4.黑龙江工程学院 机电工程学院,黑龙江 哈尔滨150050)
振动模拟是指通过在实验室中再现试件或设备在实际工作或运输环境中的振动条件,以考核产品在振动激励下的结构可靠性和操纵可靠性[1]。从试验类型角度可将振动模拟实验分为随机振动、正弦振动和波形再现3种[2]。自20世纪70年代以来,随机振动和正弦振动无论在理论还是实践上,均取得了长足进步[3-4]。但对于类似爆炸、冲击或地震等振动环境,其振动信号多为脉冲波形或长时间的时域波形。对于这种振动激励,随机振动和正弦振动均不能有效模拟,必须采用第3种方式——波形再现振动试验进行模拟[5]。比如地震模拟试验,其目的是研究试件在地震波作用下的结构响应,因而需要在振动台上再现实测的地震波。
液压振动台由于负载能力大,易实现低频大位移振动激励,常用于大型结构或试件的振动模拟试验[6]。但由于系统阻尼比低,频宽有限,且非线性因素较多,导致系统波形失真较大,响应信号与参考信号相比往往存在较大偏差。
传统的电液振动台波形再现控制算法基于系统频响函数的离线辨识结果对驱动信号进行修正,减小响应信号与参考波形信号之间的偏差[7]。传统控制算法实质为离线迭代算法,当实验过程中系统特性发生变化时,由于无法及时更新系统的频响函数,因而很难保证实验的控制精度。
逆模型辨识是自适应滤波器的基本功能之一。应用自适应滤波器实时辨识系统的逆模型,并基于辨识结果修正驱动信号,将有利于提高振动模拟实验的控制精度。文献[8]提出了一种基于LMS自适应滤波器的电动振动台随机振动控制算法,并通过仿真验证了算法的有效性。LMS算法实现简单,但收敛速度慢。基于递归最小二乘估计的RLS算法利用输入向量自相关矩阵的逆代替LMS算法中的迭代步长,将自适应滤波算法的收敛速度提高一个数量级[9],进一步提高了控制算法的实时性。
本文在三状态控制器基础之上,提出一种加速度随机波再现实时自适应控制方法。
1 三状态控制器设计
图1所示为两轴电液振动台结构及其坐标系定义。①、②两个液压缸差动伸缩运动时,实现绕x轴旋转运动(Rx);两缸同向运动时,实现绕y轴的旋转运动(Ry)。
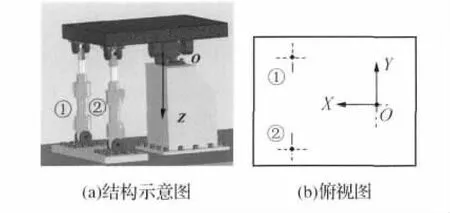
图1 振动台坐标系
三状态控制器是电液振动台控制系统的重要组成部分。对于两轴振动台的每一个运动自由度均存在一个三状态控制器。控制器主要由三状态反馈控制器、三状态前馈控制器和输入滤波器组成。以绕x轴运动为例,图2给出了三状态控制器的方框图。
图中r为加速度输入指令信号,虚线框内分别为控制器各部分的组成及参数。
三状态反馈控制器的作用是通过调节kaf、kvf和kdf3个反馈系数改善系统阻尼比,提高系统的固有频率,增强系统稳定性。三状态前馈控制器的作用通过调节kar、kvr和kdr3个前馈系数对消系统闭环传函中距离虚轴较近的极点,拓展系统的加速度频宽。输入滤波器的作用利用两次积分将加速度输入信号转变为位移信号,并通过d0及v02个参数调节系统等加速度控制起点频率。
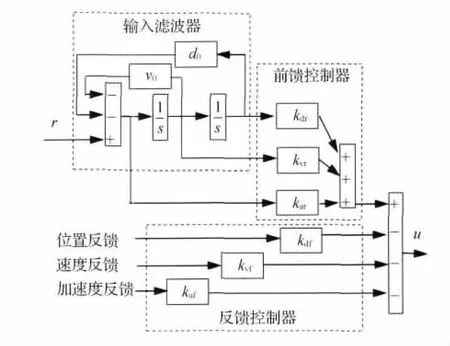
图2 电液振动台三状态控制器
已知振动台系统绕x轴的液压固有频率ωh为60Hz,阻尼比ξh为0.15,开环增益kv为60.26。取电液位置闭环系统传递函数中振荡环节转折频率ωnc为ωh的1.2倍,阻尼比ξnc为0.7,期望闭环频宽ωr为100Hz,等加速度起点频率ω0为0.5Hz,ξ0为0.7。文献[10]给出了三状态控制器参数的计算公式,此处仅给出控制器参数计算结果,如表1所示。
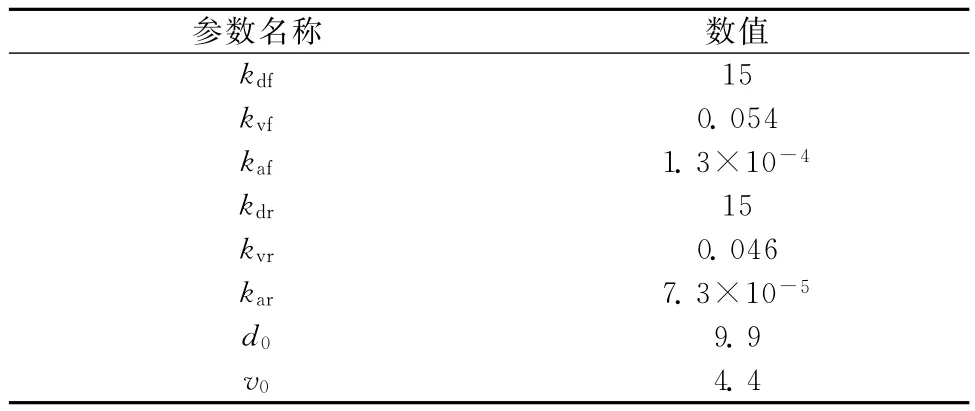
表1 三状态控制器参数
利用三状态控制器可以控制平台运动,实现系统的加速度控制。对于液压振动台,驱动信号经伺服阀、液压缸、连接球铰、平台、夹具后,最终才能传递到试件上,传递过程中有很多非线性因素,此外,试件本身也含有非线性特性。由于三状态控制器的设计是在线性系统理论假设条件下进行的,未考虑非线性因素对系统特性的影响,导致此时系统的响应信号与输入的参考信号相比往往会有很大偏差,很难满足振动模拟实验的精度要求。
基于系统逆模型的在线辨识,实时修正系统的加速度输入信号,将有利于提高系统的控制精度。
2 自适应逆模型辨识
2.1 RLS自适应滤波器
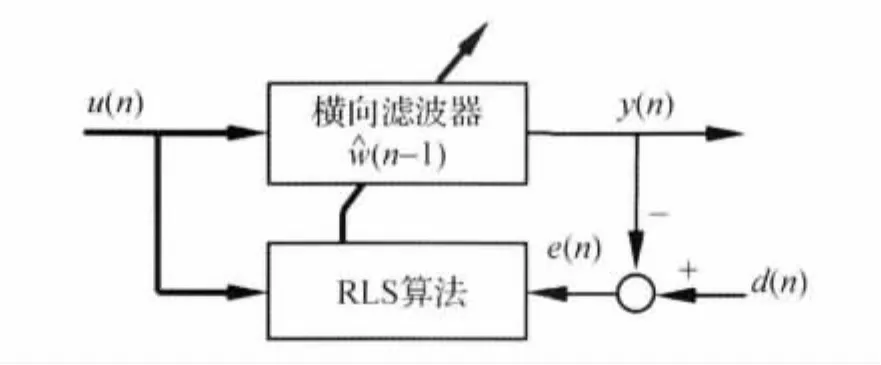
图3 RLS自适应滤波器
由图可知

由RLS算法可得
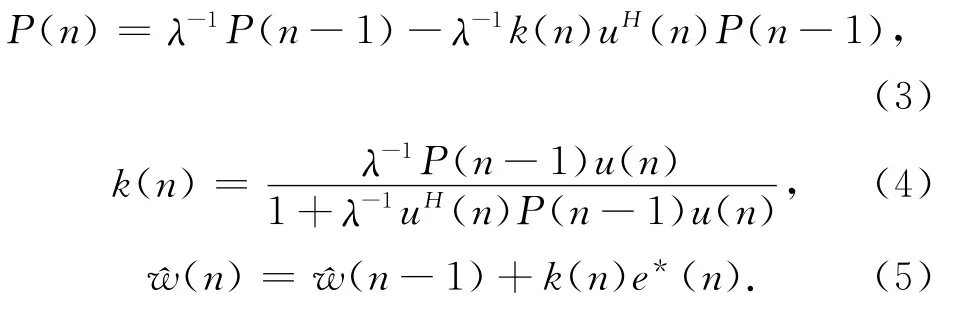
式中:k(n)为增益向量,P(n)为输入信号u(n)的自相关矩阵的逆,λ为遗忘因子,上标*代表向量的复共轭。
式(3)~(5)给出了基于RLS算法的横向滤波器权值的递归最小二乘估计递推公式,文献[9]给出了算法的收敛性证明。当迭代过程趋于稳态时,横向滤波器的权值即为u(n)与d(n)之间脉冲传递函数的最小二乘估计。
2.2 逆模型辨识
图4给出了基于RLS滤波器的逆模型辨识方法原理。

图4 振动台逆模型辨识
将振动台系统的输出信号作为RLS滤波器的输入信号,将参考模型的输出信号作为RLS滤波器的期望信号。由自适应逆控制原理可知[11],RLS滤波器的辨识结果即为参考模型和振动台系统级联后的逆模型。
3 波形再现自适应逆控制器设计
自适应逆控制的基本思想是利用自适应算法辨识系统的逆模型,然后通过逆模型对驱动信号进行修正,提高系统跟踪输入信号的能力。图5给出了基于自适应逆控制技术的电液伺服系统加速度波形再现控制器原理图。
为实现参考波形再现,取参考模型为纯延迟环节z-m(m为正整数),令限带白噪声加速度信号为图5中的辨识信号。“滤波器重构”是指利用RLS滤波器辨识结果重新构造系统的逆模型。实验中先将“信号切换”置于图5中①位,利用RLS滤波器辨识系统的逆模型。由于参考模型为纯延迟环节,因而RLS滤波器的辨识结果即为三状态控制器、电液振动台及和延迟环节级连之后的逆模型。在线监测RLS算法的迭代误差曲线,误差收敛之后,即可将“信号切换”置于图中②位,进行波形再现实验。
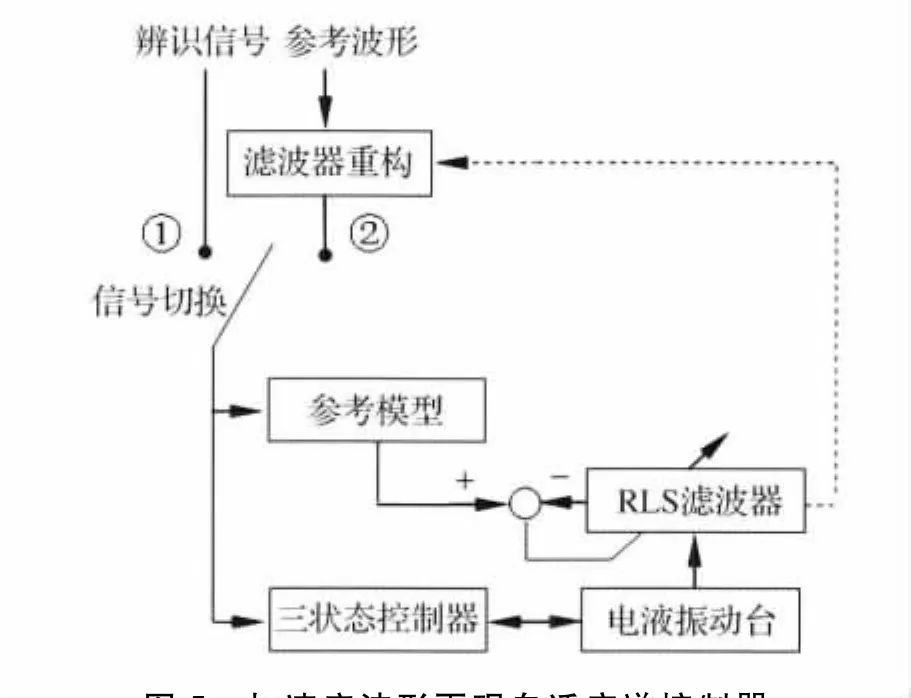
图5 加速度波形再现自适应逆控制器
由于RLS算法能够在线跟踪系统的逆模型,因此,即使实验过程中系统的特性发生变化,控制器仍可以保证参考波形的高精度再现。
4 实验分析
为验证波形再现自适应控制算法的有效性,在图6所示液压振动台绕x轴向上进行加速度波形再现实验。

图6 两自由度电液振动台
取参考加速度波形为2~30Hz的随机信号,辨识信号取为同频带内的低量级随机信号。辨识信号的量级要选取适中,在保证系统响应信号的量级高于噪声信号量级的同时,还要确保系统响应超调不过大,以免在正式实验前对试件造成破坏。
图7给出了加速度随机波再现实验过程中RLS算法的迭代误差曲线。由图7可知,在辨识信号驱动下,RLS算法迭代1s之后,误差信号的幅值达到±100°/s2,不再继续减小,表明算法的收敛时间在1s之内。
图8所示为仅采用三状态控制策略时,系统的输入信号与响应信号的对比图。由图8可知,三状态控制调节后,系统的响应信号与输入信号相比仍存在较大的跟踪误差。
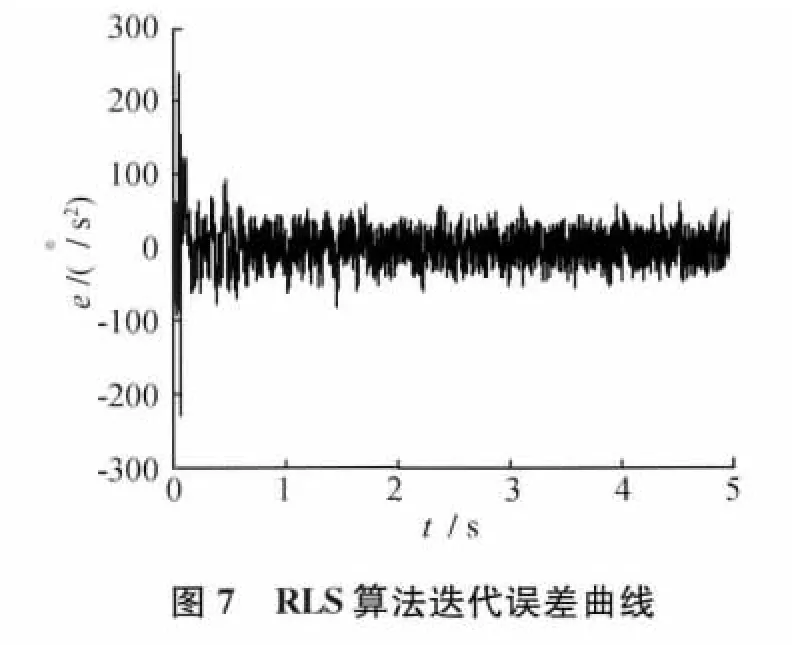
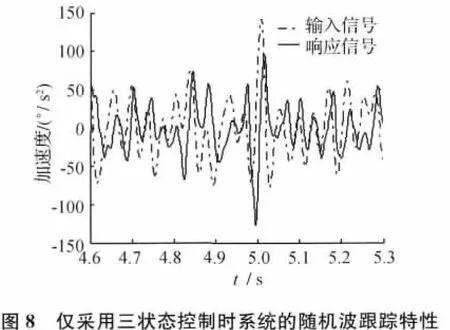
图9所示为采用自适应控制算法时,延迟后的参考信号与响应信号的对比图。由图可知,采用自适应控制算法后,参考信号的跟踪精度明显提高。

图9 采用波形再现自适应控制算法时的实验曲线
式(6)给出了波形再现时域误差的计算方法[12]

式中:r(t)为参考波形信号,c(t)为系统响应信号。依据式(6),计算上述实验中波形再现时域误差。仅采用三状态控制器时,波形再现时域误差为133.4%。采用自适应控制算法时,时域误差减小为43.2%,波形再现精度明显提高。
5 结束语
提出了一种基于自适应滤波器的电液振动台加速度随机波形再现自适应控制算法。在传统三状态控制器基础之上,基于RLS自适应滤波器实时在线辨识整个振动实验系统的逆模型,利用辨识结果重构滤波器并对参考信号进行滤波修正,将修正后的信号作为系统输入信号,驱动系统运动。加速度波形再现实验结果表明,本文提出的自适应控制算法能够明显提高控制系统的随机波跟踪性能,实现参考波形的高精度再现。
[1]Stroud R C,Hamma G A,Underwood M A,et al.A review of multiaxis/multiexciter vibration technology[J].Sound and Vibration,1996,30(4):20-27.
[2]Underwood M A,Keller T.Recent system developments for multi-actuator vibration control[J].Sound and Vibration,2001,246(4):2-8.
[3]Smallwood D O.Random vibration testing of a single test item with a multiple input control system[C].Proceedings of the Institute of Environmental Sciences’28th Annual Technical Meeting,USA,Dallas,TX,1982:42-49.
[4]Underwood M A.Adaptive control method for multiexciter sine tests:United States,5299459[P].1994-04-05.
[5]Underwood M A.Apparatus and method for adaptive closed loop control of shock testing system:United States,5517426[P].1996-05-14.
[6]韩俊伟,李洪人.流体控制技术在环境模拟与仿真试验装备中的应用[J].流体传动与控制,2005(2):34-38.
[7]Stroud R C.and Hamma G A.Multiexciter and multiaxis vibration exciter control systems[J].Sound and Vibration,1988,22(4):18-28.
[8]Groud D R,Gupta H O,Agarwal P.Design of random vibration controller using adaptive filtering[J].International Journal of Recent Trends in Engineering,2009,2(5):75-79.
[9]Haykin S.自适应滤波器原理[M].4版.郑宝玉,译.北京:电子工业出版社,2003:344-366.
[10]关广丰,熊伟,王海涛,等.6自由度液压振动台伺服控制策略[J].液压与气动,2008(10):29-32.
[11]B.Widrow and E.Walach.自适应逆控制[M].刘树棠,韩崇昭,译.西安:西安交通大学出版社,2000:138-144.
