基于横摆角速度反馈的电动助力转向车辆操纵稳定性分析
2013-07-07宋海峰杨巍巍薛清华
宋海峰,杨巍巍,薛清华,冬 煜,安 波
(1.黑龙江工程学院 人事劳资处,黑龙江 哈尔滨150050;2.黑龙江工程学院 计财处,黑龙江 哈尔滨150050;3.黑龙江省商业职工大学 计算机教研室,黑龙江 哈尔滨150050;4.黑龙江工程学院 职业技术学院,黑龙江 哈尔滨150050;5.黑龙江工程学院 计算机科学与技术学院,黑龙江 哈尔滨150050)
1 闭环系统中的驾驶员——车辆模型
对数学模型而言操纵汽车的过程是一个复杂过程。从线性的输入输出系统观点来看,汽车被认为是一个综合系统,驾驶员在其中作为反馈控制元素,驾驶员调度系统输出(侧向速度和横摆角速度)以便沿着预期的道路轨迹行驶(见图1)。驾驶员的反馈基于侧向速度,这个反馈对大多数汽车进行操纵稳定性分析是足够的[1]。系统所要求的侧向速度输入通过对道路轨迹的响应得到,预期的和实际的侧向速度之间的误差通过驾驶员处理并产生一个作用到方向盘的扭矩,方向盘扭矩通过电动转向系统被感知,并且通过助力电机被放大。EPS系统的输出扭矩耦合到车辆系统以决定转向角的大小及侧向速度和横摆角速度。驾驶员对侧向速度的感知是闭环系统的一环,用来完成对车辆道路行驶轨迹的校正。
2 二自由度车辆模型
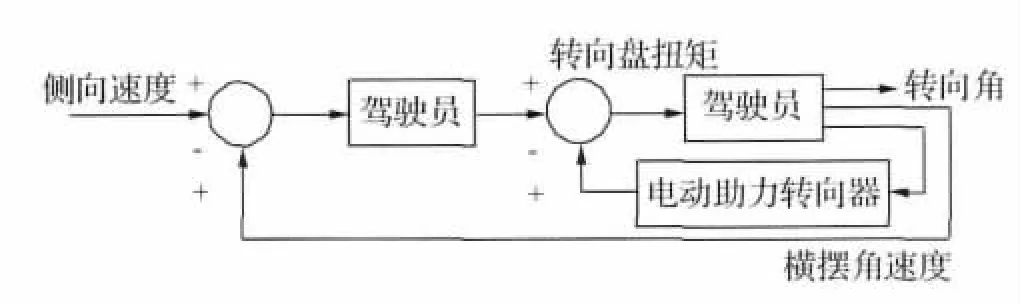
图1 驾驶员—车辆模型
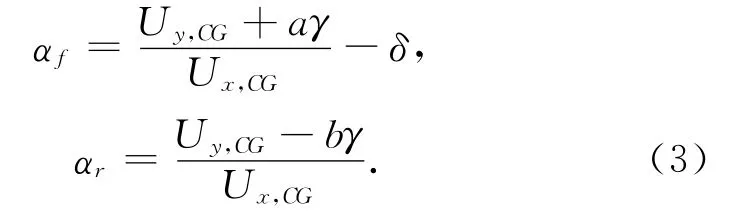
采用二自由度车辆模型作为水平方向上的车辆操纵动力学模型[2],如图2所示,该模型中各参数的含义如下:β为车辆重心位置的质心侧偏角;γ为车辆横摆角速度;δ为车辆转向角;Ux,CG为车辆重心位置处的纵向速度;Uy,CG为车辆重心位置处的横向速度;Fy,f为前轮侧偏力;Fy,r为后轮侧偏力;αf为前轮侧偏角;αr为后轮侧偏角。
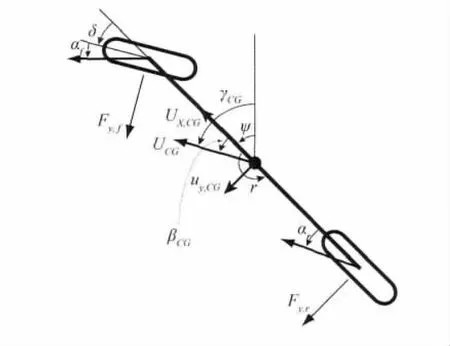
图2 二自由度车辆模型
对图2做运动学分析可得出

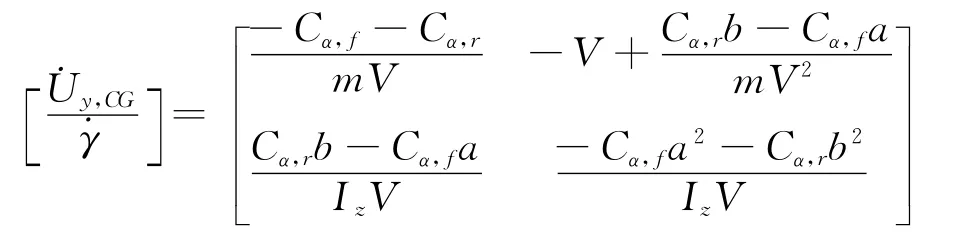
式中:Iz为车辆的转动惯量;m为整车质量;a为前轴距车辆重心的距离;b为后轴距车辆重心的距离;ay,CG为重心处的侧向加速度;Cα,f、Cα,r为前轮和后轮的侧偏刚度。
在线性范围内,前后轮的侧偏力同前后轮的转向侧偏角存在如下关系

在转向角较小的前提下,轮胎侧偏角可表示为
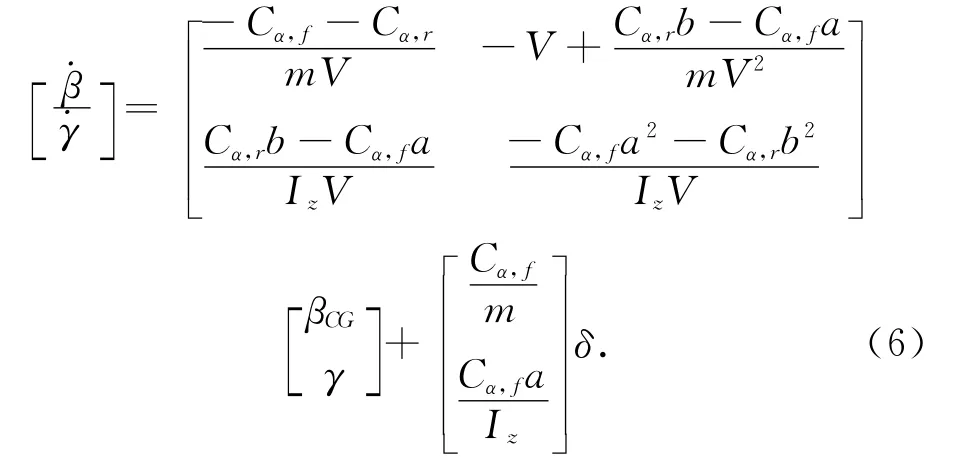
如果纵向速度Ux,CG为常数,那么二自由度车辆模型表示为
给定车身任意一点处的纵向速度Ux和Uy,那么该点处的侧偏角表示为

将重心处的质心侧偏角βCG代入式(4),可得质心侧偏角、横摆角速度和转向角之间的关系为
3 车辆转向稳定性控制策略
装配有电动助力转向系统的车辆全反馈控制策略表示为

式中:δd为方向盘转角;δ为车辆的前轮转向角。
定义前轮转向系数来表示车辆的操纵特征

将式(7)代入式(6)可以得出新的状态空间方程,该方程包含前轮转向系数
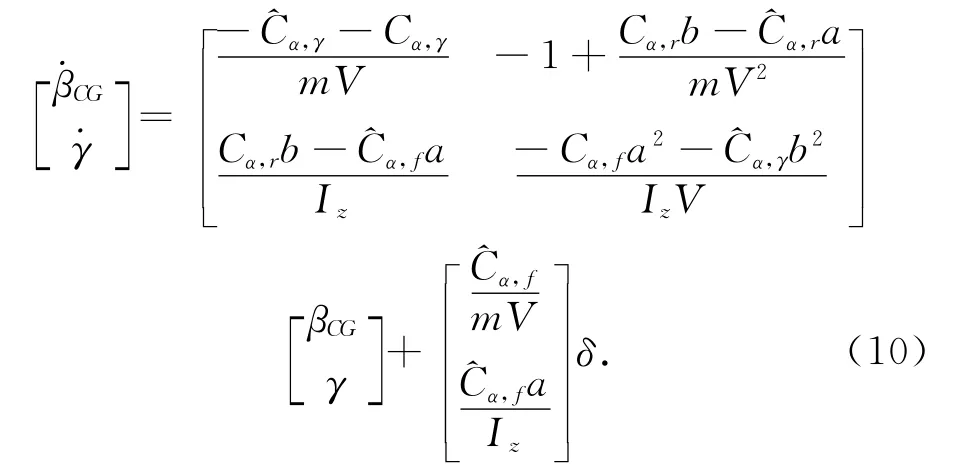
由式(10)可以看出车辆的操作稳定性直接由前轮转向系数表达,这样就可以用系数η来描述车辆的转向过度和转向不足等情况。当然还可以用许多其他的方法来做车辆的全反馈控制,但是通过调整前轮转向系数来控制车辆实际运动的方式完全可以用二自由度车辆模型来表示。事实上,上述方法已经在赛车运动中得以应用:通过更换轮胎来提高车辆的操纵稳定性[3]。
通常情况下中横摆角速度描述车辆的行驶稳定性。当汽车的质心侧偏角在较小的范围变化时,汽车的行驶状态主要由横摆角速度确定,横摆角速度越大,转弯半径越小;横摆角速度越小,转弯半径越大,因此,汽车的转向能力和运动轨迹可以由横摆角速度表征[4]。汽车的线性二自由度模型如图2所示,汽车的横摆角速度与方向盘转角成线性关系,是汽车理想的转向特性。就是说在汽车的质心侧偏角很小的情况下,由线性二自由度车辆模型决定的汽车横摆角速度对车辆来说是最稳定的。
4 试验分析
为了验证EPS系统的横摆角速度反馈能有效地增强汽车行驶稳定性,需要对上述人-车闭环系统进行试验分析,观察汽车的横摆角速度响应。因此,在1台装配了电动助力转向系统的普通轿车上安置双天线GPS获取速度方向和车辆行驶方向。用INS传感器获取横向、纵向速度以及横摆角速度等车身状态参数,试验参数如表1所示。
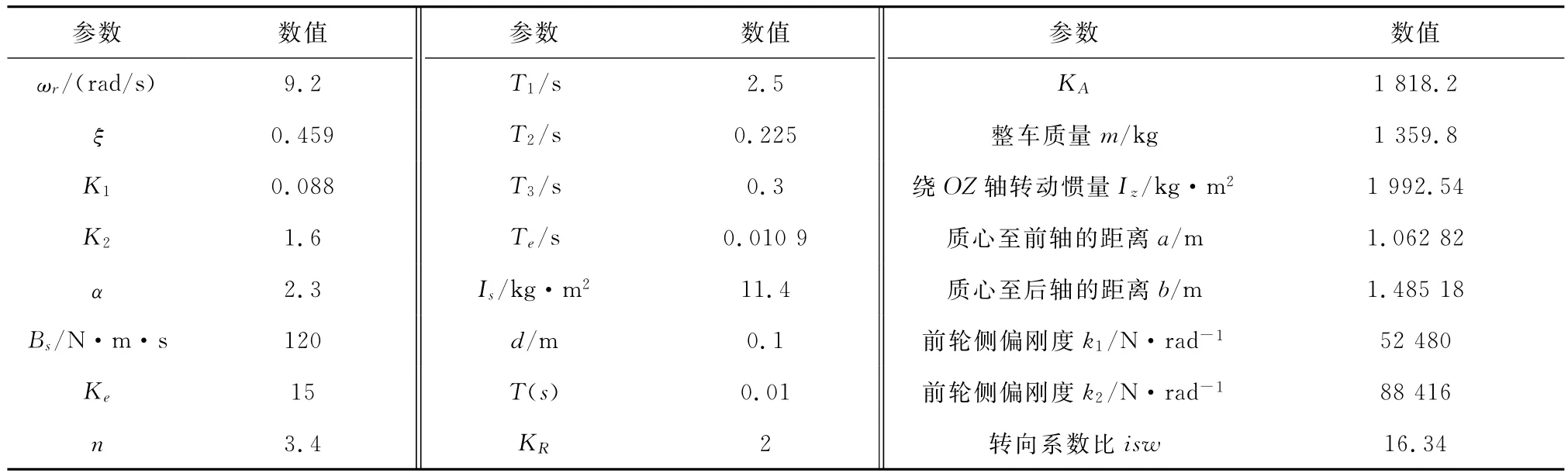
表1 车辆模型、驾驶员模型和转向模型参数
试验过程如下:
在普通的干燥柏油轮面上(摩擦系数约等于0.9),车辆沿直线开始加速行驶,一直待其速度达到20km/h,在固定方向盘转角的前提下,保持速度不变,开始记录数据。
1)测试在未加入反馈时的车辆运动状态。如图3所示,试验测得的横摆角速度数据和仿真二自由度车辆模型所计算出的数据完全吻合。
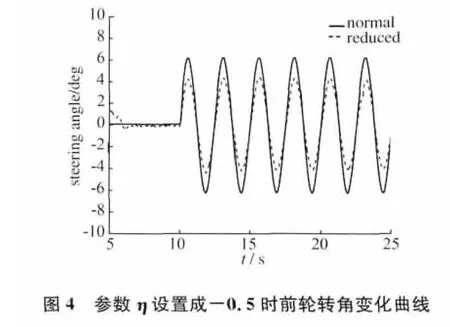
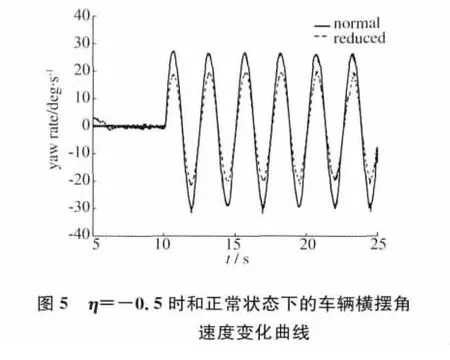
2)转向不足控制试验。本试验测试在加入负反馈时的车辆运动状态,如图4所示,当把参数η设置成-0.5时,实际的前轮转角比正常状态减少了50%。在这种状态下,由图5同样可以看出,横摆角速度的峰值比正常状态下要小。通过本试验证明,减小η值可以引起转向不足。
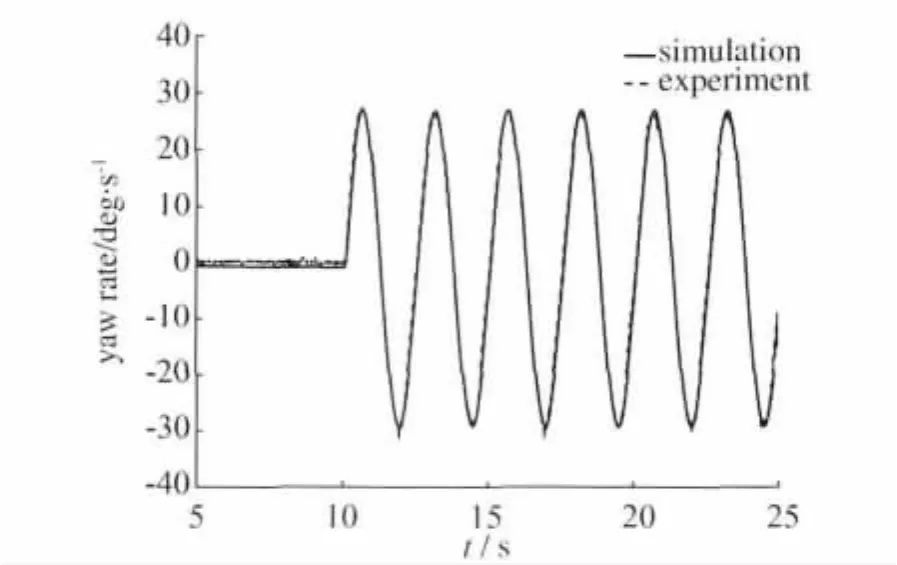
图3 无反馈控制时车辆横摆角速度和二自由度车辆模型计算的横摆角速度曲线
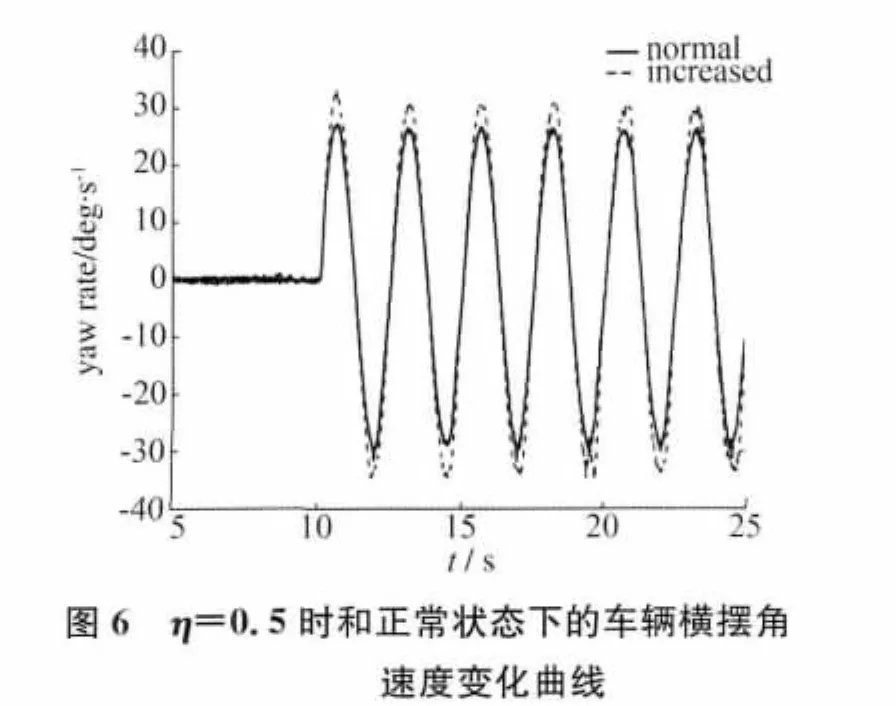
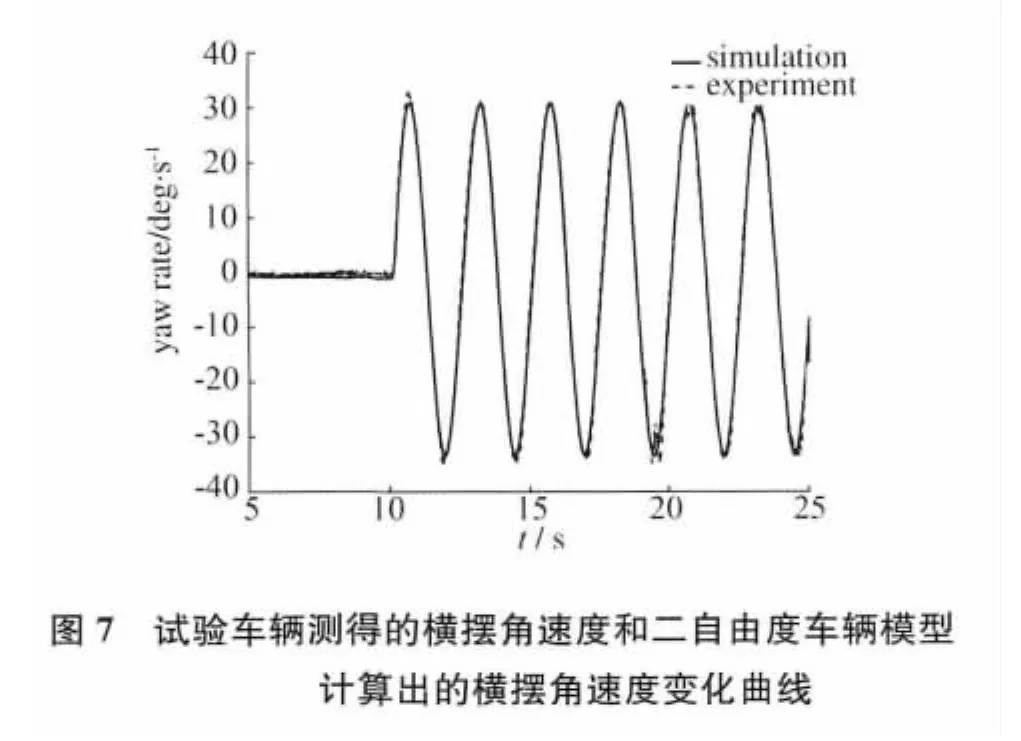
3)转向过度控制试验。本试验测试在加入正反馈时的车辆运动状态,当把参数设置成0.5时,采用相同的转向输入,如图6和图7所示,车辆的横摆角速度峰值明显高于正常状态。同时,试验所得的横摆角速度数值同二自由度车辆模型计算的结果在某些地方有所偏差,这说明车辆进入了非线性运动状态。
5 结束语
车辆横向稳定性不仅与结构参数、行驶速度、方向盘转角等有关,而且还受到路面附着系数、侧风等很多不确定性因素的影响,横向稳定控制变得十分复杂。本文在不改变电动助力转向车辆原有系统结构的基础上基于横摆角速度反馈的电动助力转向车辆控制策略,并用二自由度车辆模型对此控制策略进行验证,得出以下结论:
1)本文所提出的基于横摆角速度反馈的电动助力转向车辆控制策略与二自由度车辆模型的计算结果相符合;
2)通过改变控制策略中的η值,有效地改善车辆在行驶过程中的转向不足和转向过度问题,提高车辆主动安全性,增强车辆行驶稳定性。
[1]吴义虎,宋丹丹,欧林立,等.横摆力矩和主动前轮转向结合的车辆横向稳定性模糊控制仿真[J].计算机技术与自动化,2007(12):36-39.
[2]陈燕 ,刘晶郁 ,陈少华,等.横摆角速度反馈对车辆操纵稳定性的影响[J].长安大学学报:自然科学版,2006(11):99-101.
[3]李继来.车辆稳定性控制系统的研究与实现[D].北京:中国科学技术大学,2009.
[4]程林志,赵燕.使用电动转向器的汽车操纵稳定性研究[J].湖北工业大学学报,2005(3):120-122.
