基于DSP逆变电源的设计
2013-07-05霍国存
霍国存
(山西焦煤霍州煤电集团有限责任公司,山西 霍州 031400)
0 引言
随着电力电子技术的飞速发展和逆变技术在许多领域的广泛应用,人们对逆变电源性能的要求,不仅要有很好的输出波形质量,而且对其稳态、动态性能的要求也日益提高。逆变器输出波形质量主要包括三方面:一是稳态精度要高;二是动态性能要好;三是电路结构和控制方法要简单优良。笔者提出了一种适用于5kVA电力专用UPS中的基于DSP控制的逆变电源系统。该系统可将190~286V的直流电转换成50Hz、220V的稳定交流电。在控制方案上采用重复控制与PI双闭环控制相结合的方法,其中重复控制能够很好地解决逆变输出的稳态性能;而PI控制有很好的动态调节能力,同时DSP控制芯片又有很高的数据处理能力以及丰富的接口电路,方便了系统的设计,同时也降低了开发成本和周期。
1 系统结构
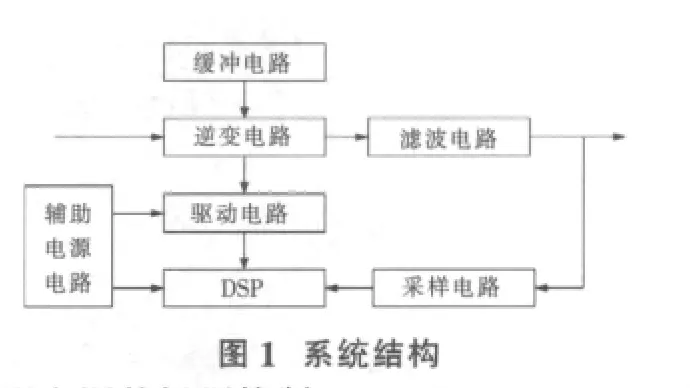
图1是逆变电源系统的结构。该系统采用单相全桥逆变电路,选择IGBT作为主控器件。控制回路由DSP控制芯片电路、采样电路、驱动电路、辅助电源电路等构成。其中DSP控制芯片电路是系统的核心,可产生SPWM波形控制信号,从而控制驱动电路完成IGBT主控器件的驱动,同时监控逆变电源输出电压,并通过采样电路实现电源的闭环控制。
2 系统主电路
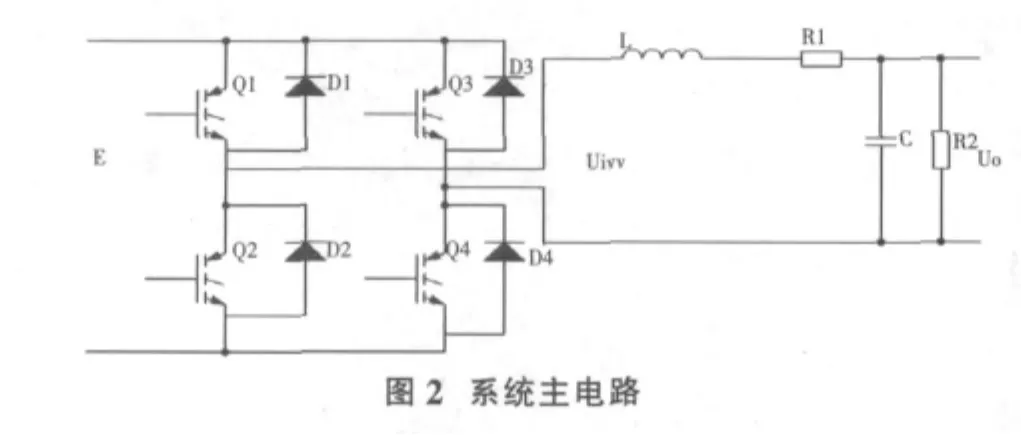
系统主电路如图2所示。采用电压型逆变电路,换向在同桥臂开关管之间进行,可以通过控制输出电压的幅值和波形来控制其输出电压。
系统的开关元件选择某公司生产的六单元L系列IGBT模块。若直流输入电压范围为190~286V,则加在逆变器上的最大电压为:
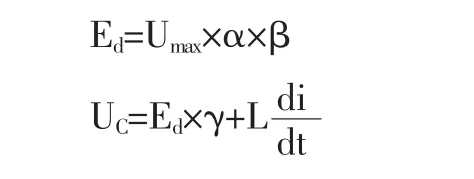

式中:KA=1.5,过载因数;KR=1.2,安全系数;PNV—逆变输出功率(W);UNV=220(1-1%)V。 又:

由式(1)、 式(2)可得:

考虑到系统的安全性和工作的可靠性,在选择模块时留有一定的余量,最终选择100A/600V的逆变模块,其型号PM100CLA060,开关频率为20kHz。主电路中由L1、C2构成的低通滤波器又叫常数K型Γ型低通滤波器,为了使滤波的滤波效果更好,根据系统要求取L1、C2的值分别为1mH、30μF。
3 控制电路及工作原理
控制电路以TMS320F2812数字信号处理芯片为核心并充分利用其硬件资源,如PWM管脚的输出用于驱动信号;ADC采集口用来进行模拟量和数字量的转换;CAP捕获引脚用来检测频率和相位等,从而完成波形的产生、控制算法的实现及数据处理等功能。
3.1 采样电路
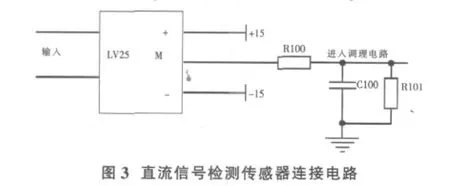
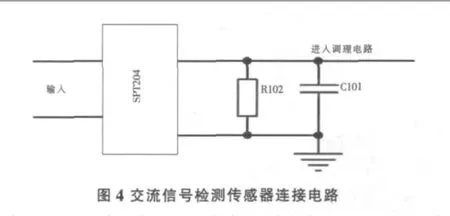
由于系统为实时控制系统,对采样的精度和快速性要求比较高,所以采用电压、电流传感器来得到低压信号。直流检测使用霍尔传感器LV25;交流检测使用交流传感器SPT204A,其电路如图3、4所示。
3.2 频率、相位检测调理电路
由于设计的是UPS中的逆变器,要想实现市电输入与逆变器输出之间的准确切换,对市电和逆变器输出电压的频率和相位的检测是必不可少的。其检测电路如图5所示。图中U1及其外围元件构成放大环节,可将检测到的电压信号进行放大;U2及其外围元件构成比较电路。
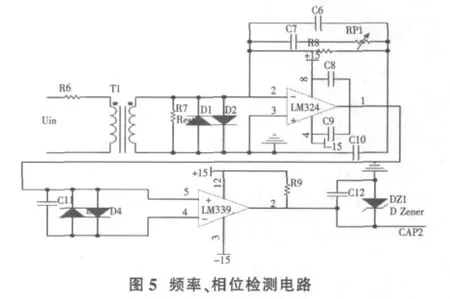
当输入的电压低于或高于某一电压值(一般设置为0V)时,LM339的输出就会反转。所以LM339的输出为高、低电平,DSP通过对高、低电平在一个工频周期内的计数,即可计算出输入电压的频率,同时也可得到对应的相位。如果逆变器输出电压的频率和相位与市电电压的频率和相位的差值在规定的范围内,便可以进行切换,否则不能进行切换。
由于电压传感器的使用会使检测到的相位偏离输入电压的相位,这将对UPS系统在切换时产生影响,严重时可使系统受到破坏。为了解决该问题,电路中用电容C7和可调电阻RP1构成相位补偿电路,从而消除相位偏离的问题。
3.3 IPM驱动电路
驱动电路采用智能功率IPM模块。该模块集成了IGBT的栅极驱动电路、故障检测和保护电路等。
来自DSP的SPWM信号经过限流电阻R,再经高速光耦隔离放大后送入IPM内部驱动电路并控制开关管工作。IPM中的FO引脚通过低速光耦连接到DSP的PDP INT引脚,当该引脚为低电平时,DSP发出中断指令,所有的事件管理器输出引脚均被硬件设置为高阻态,此时没有PWM信号的输出,从而达到保护的功能。
4 软件设计
软件设计采用C语言和汇编语言相结合的方式,主要完成PI双闭环控制、重复控制、A/D转换、SPWM脉冲的生成等。主程序主要完成系统的初始化、协调和控制其他子程序模块的任务。PI控制模块完成电压、电流的双闭环控制功能,使输出电压、电流稳定在设定值上,重复控制模块可将反馈回来的电压或电流信号与给定值求差,得到当前误差量,此误差量和上周期输出量的和作为本周期的输出,即每隔一个周期输出量获得一次累加,当累加到一定值时,重复控制器开始作用,直到输出的波形,达到设计的要求,重复控制器停止调节。SPWM脉冲生成模块可产生规定的正弦波。A/D转换模块将采样的模拟信号转换为数字信号。
5 仿真分析
应用Matlab的动态仿真工具Simulink对系统进行仿真,仿真模型参数:直流电压UDC=280V、逆变额定输出电压UO=220V、输出频率f=50Hz、滤波电容C2=30μF、滤波电感L1=1mH、负载RL=5Ω、开关管的频率f=10kHz;内环 KpI=4.49×10-4、 KiI=5.63;外环 KpO=0.0936、KiO=57.8448。 重复控制器的各参数 Q(z)=0.95、N=200、k=4。
仿真结果显示,该系统可获得50Hz的220V的稳定交流电,且系统动态响应快,超调量小,稳态误差较小,逆变输出电压波形的总谐波失真THD小于3%,能够满足5kVA电力专用UPS中逆变电源系统的使用要求。
6 结论
逆变电源系统可将190~286V的直流电转换成50Hz的220 V的稳定交流电,并有较好的稳、动态性能。各电路设计结构简单、可靠性高、成本低,达到了5kVA电力专用UPS中逆变电源系统的使用要求。
[1]刘凤君.现代逆变技术及应用[M].北京:电子工业出版社,2006.
[2]陈道炼.DC-AC逆变技术及其应用[M].北京:机械工业出版社,2003.
[3]王耀北,阎英敏,胡玉贵.DSP控制的IPM正弦逆变电源系统硬件电路设计[J].现代电子技术,2005,24.
[4]张承志,等.不间断供电系统[M].北京:机械工业出版社,1987.
[5]TEXAS INSTRUMENTS INC.TMS320F2812 digital signal processor user guide[M].Dallas:Texas Instruments Incorporated,2003.
[6]周永忠,等.功率MOSFET模块驱动电路[J].电力电子技术,1993,4.