基于空域和局部纹理加权的阴影检测与去除方法
2013-07-05郑颖,赵娟,肖宿
郑 颖,赵 娟,肖 宿
(淮北师范大学 计算机科学与技术学院,安徽 淮北 235000)
基于空域和局部纹理加权的阴影检测与去除方法
郑 颖,赵 娟,肖 宿
(淮北师范大学 计算机科学与技术学院,安徽 淮北 235000)
为解决传统智能交通系统中由于阴影检测算法的不精确性导致错误提取交通参数的问题,提出一种基于空域和局部纹理加权的阴影检测与去除方法,通过分析阴影产生的原因和阴影的特点,综合利用阴影的交叉熵特征和邻域光度特性去除阴影.实验表明,该方法阴影检测的有效率在81.3%以上,并且能很好地满足实时场景要求,为后续交通参数的提取等工作奠定良好的基础.
背景差分;光度特性;交叉熵;阴影去除
0 引言
运动目标的检测是智能交通系统研究中的一个主要内容,它是运动目标跟踪、识别以及交通参数提取的前提和基础,精确的目标检测有利于更好地开发智能交通系统.在运动目标的检测方法中,阴影常伴随运动目标,同时被检测出来,由此会产生一系列的问题,例如运动目标合并和运动目标的不完全检测,相邻的目标也可能因为阴影导致漏检,这些问题会影响后续车辆的跟踪和识别.
目前基于视频的运动目标的阴影检测法研究大致分为两类:其中一类是基于阴影属性的检测方法[1-4],另外一类是基于阴影模型的检测方法[5].其中基于阴影属性的检测方法使用光照强度、颜色、纹理、特征点等特征及特征组合来检测阴影,基于模型的方法需要复杂场景、运动目标及光照的先验知识等来建立模型,运算时间复杂度特别大,这种方法比较适合单一场景下的单一目标的阴影检测.通过比较发现基于属性的阴影检测方法是最稳定的算法.
Cucchiara等[2-3]使用HSV颜色空间来检测及消除阴影,该算法时间复杂度较小,但对于灰色路面阴影去除效果较差.Kumar等[5]在多个颜色空间中比较检测结果,实验效果表明YCrCb颜色空间是最有效地去除阴影的颜色空间,但运算量比较大,并且对于深颜色的车辆阴影去除效果较差.Leone等[4]提出基于纹理的阴影消除方法,该算法提取阴影的纹理特征,并结合阴影的光度特性去除阴影,该算法能有效地去除阴影但其运算量比较大.为解决深颜色车辆的阴影去除并降低运算量,本文提出在检测出阴影方向的基础上,使用传统的光度特性和交叉熵特征去除阴影,从邻域思想考察像素点的光度特性来初步定位阴影区域,并根据阴影方向求出初定位阴影区域中各像素的距离权值,最后用距离对交叉熵特征进行加权从而去除阴影的方法.同时,基于三星SDZ-310P 30X光学变焦镜头、MV-88000采集卡建立室内实验环境,并在VC++6.0开发环境中进行监控软件的开发与算法实验.
1 阴影检测与去除
1.1 定位阴影方向
像素分为暗像素和亮像素两类,暗像素和亮像素的分类是基于像素亮度特征的,如果RGB三个颜色通道的亮度值都大于等于对应的背景像素值,则该像素被认为是亮像素,否则被认为暗像素.我们把检测出来的运动目标在重心处划分成4个相互重叠的部分,分别为上部,下部,左部和右部,使用u,d,l和r来表示每一个方向上的暗像素数量,定义N=(u+d+r+l)/4,其中m和n为{u,d,l,r}中最大的两个,8个方向{0, 1, 2, ..., 7}定义如图1所示,a和b是m和n的对应方向值,考虑阴影会同时出现的区域,令A=(a+b)/2,B=| |
a-b,那么阴影方向o按下面的定义确定:
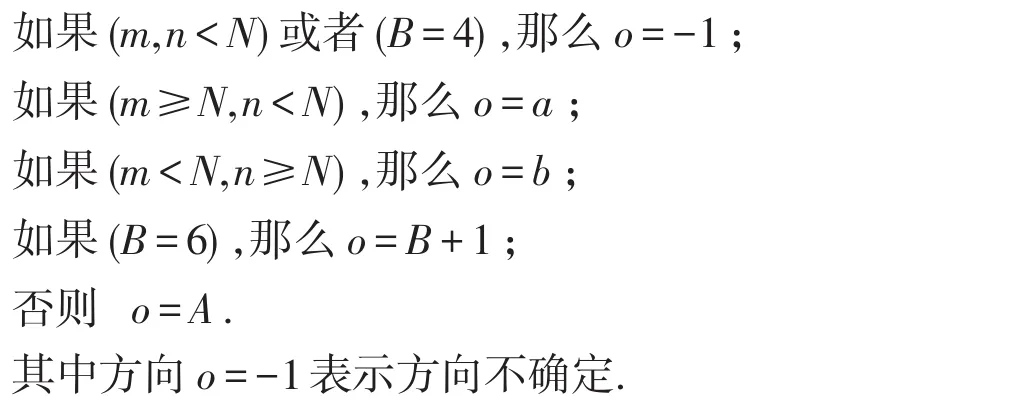

图1 阴影方向分类
1.2 检测阴影区域
阴影区域的检测是在阴影方向定位的基础之上,根据阴影形成及其光谱属性来初步检测阴影区域.文献[7]将当前图像帧像素点的灰度值与背景图像帧相对应像素点的灰度值进行相比,根据比值的范围来确定阴影区域,因为只考虑了单个像素点,且阈值固定,所以该方法会造成一定程度的漏检和错检,本文对其方法加以改进,从邻域思想出发,并通过直方图确定自适应阈值.
实现步骤为:
1)计算像素点与其8-邻域内像素点灰度值的平均值,有:

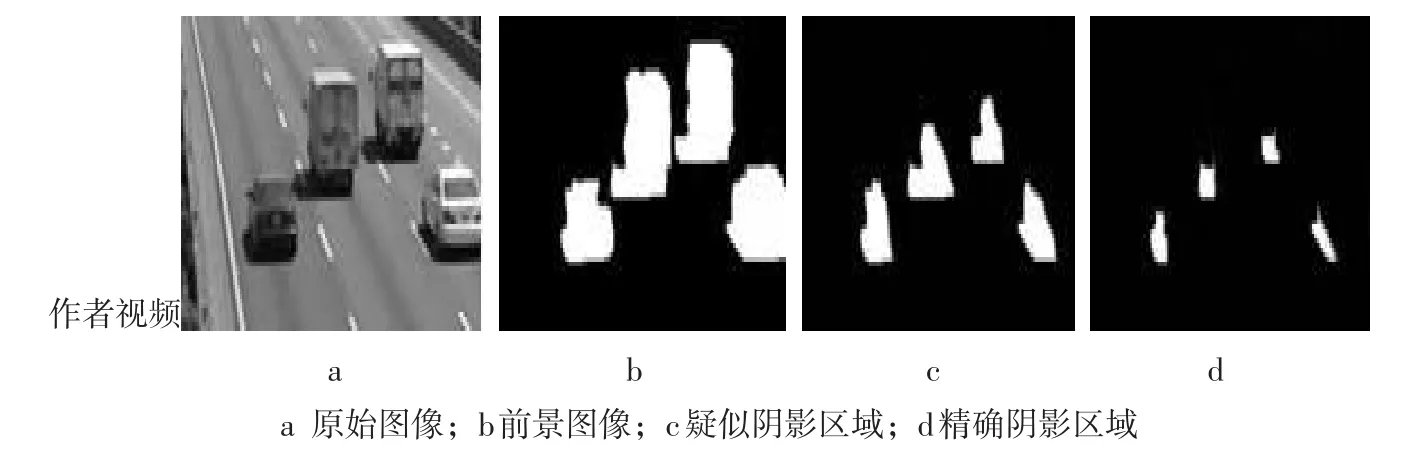
图2 浅色车辆阴影候选区域
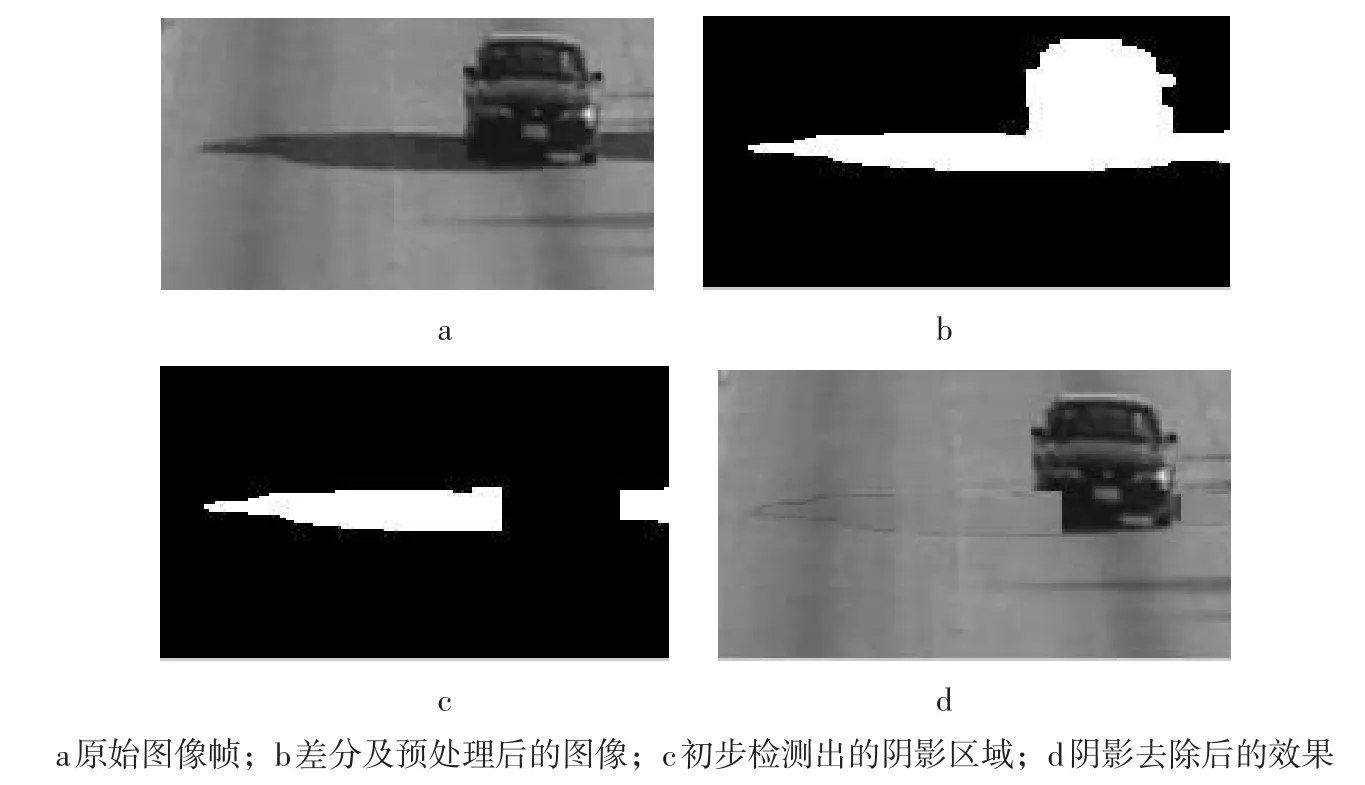
图3深色车辆阴影候选区域
1.3 加权交叉熵特征阴影去除
由图2d可以看出上述阴影去除方法能够很好地去除阴影区域,但美中不足的是存在过去除现象,为进一步精确去除阴影,考虑交叉熵能够处理两个事件的相似程度,故本文引用其作为阴影区域和背景区域相似程度的度量.首先介绍交叉熵:


考虑阴影和背景的纹理相似特性,在初步定位的阴影区域中根据纹理特征去除阴影.设视频大小为M*N,令B(x,y)为背景图像亮度,I(x,y)为当前帧图像中初定位阴影区域的亮度,定义以点(x,y)为中心,(2l+1)*(2l+1)的模板Tx,y(m,n)=I(x+m,y+n),其中-l≤m≤l,-l≤n≤l.当前帧图像上点(x,y)与对应背景点的亮度的交叉熵定义为:

考虑运动目标产生阴影的原理可知某一像素点为阴影像素点的可能性与其距离中心点的距离有关,如图4所示,因此本文利用此距离对交叉熵特征进行加权,

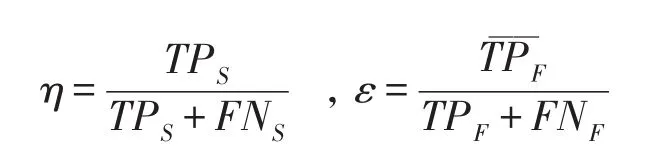
其中(Xc,Yc)为检测目标的最大外接矩形的中心点.S(x,y)值越小表示当前像素点与对应背景帧像素点的纹理特征越相似,则点(x,y)是阴影像素点的概率越大,设定阈值TH,若S(x,y) 图4 权值意义示意图 本实验在VC平台上编程实现,所用PC机配置为Pentium D 2.8 GHz,1 GB内存,选取两段高速公路阴影检测视频,采用文献[7]中提出的阴影检测率η和阴影识别率ε对该算法的性能来进行定量的评估,定义如下: 其中,下标S表示阴影像素,F表示前景像素,TPS表示正确检测出的阴影像素点的数量,FNS表示把阴影像素错误检测为前景像素点的数量,TPF表示被检测为前景像素的数量和被错误检测为阴影像素点数量的差值,FNF表示前景像素点被错误检测为阴影像素点的数量.表1给出了针对相同的5个经典视频,不同方法的算法性能比较,通过比较可以看出,相比文献[5]给出的4种检测方法(统计无参数方法SNP,统计带参数方法SP,确定性不基于模型的方DNM1,和确定性不基于模型的方法DNM2),本文结合光度特性和交叉熵的方法通用性更强,检测精度也有一定程度的提升. 表1 实验结果对比分析 % 为了定性的评价算法效果,本文选取阴影去除检测效果的2段经典视频和作者自己录制的1段视频,如图5所示,实验效果表明,本文所提出的阴影去除方法能够准确地去除阴影,精确分割出运动目标,为进一步提取交通参数奠定了良好的基础. 图5 实验结果比较图 本文提出一种基于邻域光度特性和加权交叉熵特征的阴影去除方法,该算法利用阴影的方向、邻域光度特性及加权交叉熵特征确定阴影区域并进行精确去除,实验结果表明,本算法鲁棒性强,时间复杂度低,且事先不需要知道光源方向,具有很好的实际应用价值. [1]CUCCHIARA R,GRANA C,NERI G,et al.The Sakbot system for moving object detection and tracking[C]//Video Based Surveillance Systems-Computer Vision and Distributed Processing.Boston:Kluwer,2005:145-157. [2]CUCCHIARA R,GRANA C,PICCARDI M,et al.Improving shadow suppression in moving object detection with HSV col⁃or information[C]//2007 IEEE Intelligent Transportation Systems Conference Proceedings.Oakland:IEEE,2001:334-339. [3]KUMAR P,SENGUPTA K,LEE A,et al.A comparative study of different color spaces for foreground and shadow detec⁃tion for traffic monitoring system[C]//Proceedings of the IEEE 5th International Conference on Intelligent Transportation Systems.Washington,DC:IEEE,2002:100-105. [4]LEONE A,DISTANTE C.Shadow detection for moving objects based on texture analysis[J].Pattern Recognition,2007,40(4):1222-1233. [5]PRATI A,MIKIC I,TRIVEDI M,et al.Detecting moving shadows:Algorithms and evaluation[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2003,25(7):918-923. [6]付萍,方帅,徐心和,等.视频监控系统中运动目标检测的阴影去除方法[J].计算机工程,2007,33(10):22-24. [7]WANG J M,CHUNG Y C,CHANG C L,et al.Shadow detection and removal for traffic images[J].IEEE Inter 2 National Conference on Net Working,Sensing and Control,2008,649-654. Shadow Detection and Removal Method Based on Spatial Domain and Invariant Texture Weighted ZHENG Ying,ZHAO Juan,XIAO Su In order to solve the difficulties of extracting the wrong traffic parameters caused by the inaccuracy of shadow detection methods in traditional intelligence traffic system,a method of shadow detection and re⁃moval is proposed based on spatial domain and invariant texture weighted.After analyzing the causes and the characteristics of the shadow,the shadows can be eliminated by using the region photometric properties and cross-entropy.Experiments on different scenes suggest that effective detection rate of the proposed meth⁃od is over 81.3 percent,which can satisfy the requirement of real-time processing and set a good foundation for extracting traffic parameters. background subtraction;photometric properties;cross-entropy;shadow removal TP 391.4 A 2095-0691(2013)04-0067-05 2013-07-13 安徽省优秀青年人才基金项目资助(2011SQRL073);淮北师范大学青年基金项目资助(2009xqx45) 郑 颖(1982- ),女,安徽淮北人,讲师,主要研究方向:模式识别与图像处理.
2 实验结果分析


3 结论
(School of Computer Science and Technology,Huaibei Normal University,235000,Huaibei Anhui,China)
