基于改进的EKF法估计电动汽车电池SOC
2013-07-05严喜林许加柱兰五胜
严喜林,许加柱,何 建,兰五胜
(湖南大学电气与信息工程学院,湖南 长沙 410082)
基于改进的EKF法估计电动汽车电池SOC
严喜林,许加柱,何 建,兰五胜
(湖南大学电气与信息工程学院,湖南 长沙 410082)
基于传统卡尔曼滤波算法的电池组荷电状态(state o f charge,SOC)估计方法适合于电流变化比较剧烈的电动汽车动力电池SOC估计,但由于电池模型以及系统噪声、量测噪声统计特性的不确定性,容易引起滤波发散。在研究与分析极化效应、库仑效率、内阻、温度、老化等对电池可用容量的影响实验的基础上,对扩展的卡尔曼滤波(expended ka l man fi l ter,EKF)算法进行改进。实验结果表明:改进后的EKF方法对随机的量测噪声具有较强的抑制能力,提高了估算精度,更适用于实际应用。
电动汽车;荷电状态;EKF法
锂电池作为储能设备,是电动汽车动力系统的重要组成部分。电池剩余电量是反映电动汽车动力电池性能的重要参数。电池SOC的准确估算可以防止电池过充和过放,提高电池的使用寿命。目前,国内外普遍采用的电动汽车动力电池SOC估算方法有:Ah计量法、开路电压法、放电实验法、负载电压法、内阻法、线性模型法、神经网络法和卡尔曼滤波法等。
Ah计量法是通过负载电流的积分估计SOC,简单易行、算法稳定,是目前电动汽车上使用最多的SOC估计方法。但实际应用时存在不能准确估计初始值SOC0、库仑效率难于准确测量等缺点。开路电压法的估计结果较准确,尤其在充放电的初期和末期效果比较好,但需要将电池长时间静置才能获得稳定的开路电压,不能用于电池SOC的动态估算。放电实验法适用于所有电池,但缺点是需要耗费大量时间,且无法在线估计电池SOC。卡尔曼滤波法是近年来出现的新的估算方法,能将电池的非线性状态空间模型线性化,通过递推算法对电池SOC实现最小方差意义上的最优估计,并能给出估计的误差,对SOC的初始误差有很强的修正作用,特别适合于电流变化较快的电动汽车电池的工况。但当量测噪声统计随实际工况条件剧烈变化时,会导致估测不准,甚至滤波发散。
本文采用改进的扩展卡尔曼滤波(extended Kalman filtering,EKF)的动力电池SOC估算算法,改善量测噪声对估计结果误差的影响,并考虑了极化效应、温度、老化对电池SOC估计的影响。
1 SOC估计算法设计
1.1 基于卡尔曼滤波算法估计的基本原理卡尔曼滤波理论的核心思想,是对动力系统的状态做出最小方差意义上的最优估计,应用于电池SOC估计,电池被看成动力系统,SOC是系统的一个内部状态。卡尔曼滤波用于
SOC估计时,电池模型描述为由状态方程和量测方程组成的系统,其控制结构如图1所示。
状态方程:

式中:Ak为系统矩阵;Bk为控制输入矩阵;Ck为量测矩阵;z-1I为延时环节;wk为系统噪声;vk为量测噪声;系统的输入向量uk中,通常包含电池电流、温度、剩余容量和内阻等变量,系统的输出yk通常为电池的工作电压,电池SOC包含在系统的状态量xk中。f(xk,uk)和g(xk,uk)都是由电池模型确定的非线性方程,在计算过程中要进行线性化。估计SOC算法的核心,是一套包括SOC估计值和反映估计误差的、协方差矩阵的递归方程,协方差矩阵用来给出估计误差范围。
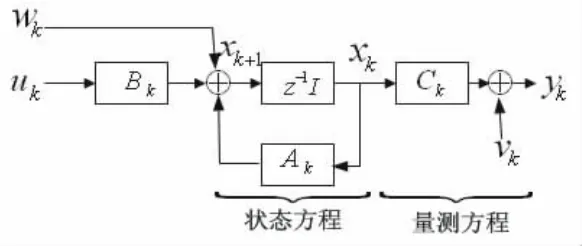
图1 卡尔曼滤波器结构图
卡尔曼滤波算法估计电池SOC的研究在近年才开始,该方法适用于各种电池,与其它方法相比,尤其适合于电流波动比较剧烈的电动汽车动力电池SOC的估计。
1.2 电池模型
适合于卡尔曼滤波算法估计的电池模型必须具有以下特点:能较好地体现电池的动态性能,同时阶数不能太高,以减少处理器的运算量,便于工程实现。另外,模型必须能够准确地反映电池电动势与端电压的关系,从而使闭环估计有较高的精度。
鉴于以上考虑,借鉴文献[1],文中使用电化学复合模型得到的单变量模型建立电池系统的量测方程,如式(3)所示,它是基于Shepherd模型、Unnewehr模型和Nerst模型组合得到。

式中:yk为用模型算得的电池负载电压;xk的分量仅有一个,为SOC;ik为负载电流;R为电池内阻,其他为无物理意义的模型参数,所有参数通过相关电池实验数据进行最小二乘法辨识得到。
1.3 对电池模型的修正
电池的荷电状态(SOC)之所以估算困难,是因为它受放电电流、电池内部温度、自放电、老化等多种因素的影响,因此,在SOC估算中必须对电池模型进行相应的修正。
1.3.1 极化效应对电池模型的修正
极化效应是指电池在持续电流作用下端电压偏离开路电压的情况。这种偏离与电流在电池内阻上产生的压降有很大区别。电流在电池内阻上产生的压降是随电流产生而立即产生的,当电流消失时也同时消失,只是一个线性过程。而极化效应与电流之间存在滞后关系,电流产生后很短的一段时间内极化效应使电池端电压迅速发生变化,然后缓慢变化,最后趋于稳定。将静态极化作用对计算端电压造成的误差作为观测误差进行处理,即极化作用处理成Vk,在电流为0时,锂电池剩余容量不变,不考虑极化效应。
通过实验得到的数据,可以计算出极化效应对充电或放电动态过程中的影响:

式中:c1为常数;T1为充电或放电过程中极化效应达到饱和的时间常数;t为充电或放电过程持续的时间。
在充电或放电过程结束后,极化效应对电压恢复的影响如下:
式中:c2为常数;T2为电压恢复过程中极化效应完全消除的时间常数;t为电压恢复的时间常数。
1.3.2 对库仑效率的修正
由于内阻的存在,电池的任何充电、放电过程都有电量损失并且损失明显,在估计电池SOC时,必需考虑库仑效率。而传统定义下的库仑效率没有考虑充放电差异、电流大小、运行温度等因素的影响,为了克服传统库仑效率的缺点,同时将电池变电流充放电过程归一化为恒电流充放电过程,文中提出了折算库仑效率的概念。折算库仑效率的核心思想是将不同电流的库仑效率统一到3小时倍率放电C3/3的库仑效率上。定义基准库仑效率ηs为用C3/3从电池中放出的电量Qsd与用C3/3使电池SOC恢复到放电前状态所需要的电量Qsc之比;定义充电折算库仑效率ηc为用C3/3从电池中放出的电量Qcd与用特定电流In使电池SOC恢复到放电前状态所需要的电量Qcc之比;定义放电折算库仑效率ηd为用特定电流In从电池中放出的电量Qdd与用C3/3使电池SOC恢复到放电前状态所需要的电量Qdc之比。
在电池变电流充放电的情况下,电流可以等效为多个恒流充电和恒流放电微段的首尾相接。假设电池以Inc充入Qnc,以Ind放出Qnd,用充电和放电折算库仑效率将其折算为C3/3的恒流充放电过程,归纳得到式(2)所示折算库仑效率ηe的定义公式:

1.3.3 对电池内阻的修正
不同循环寿命下电池的内阻相差较大。随着电池容量的下降,电池内阻逐渐增大,影响逐渐增强。因此使用时必须对电池内阻进行修正。
以某种型号3.6 V/2.4 Ah锰酸锂动力电池为实验样品,采用脉冲放电法测定不同温度和SOC工况下内阻的变化。其中R/R0为电池实际内阻与标称内阻(25℃,SOC=0)的比值。将实验数据进行拟合,可以得出电池内阻温度和SOC综合变化趋势,拟合方程为:

1.3.4 对电池可用容量QN的修正
电池可用容量QN受温度和老化影响明显。定义kCT为老化对QN的影响系统,定义kCL为老化对QN的影响系统,可得QN的计算公式为:

(1)温度对QN的影响
图2所示为实验得到的影响系数kCT随温度的变化曲线。由图可见,在低温与高温范围内,锂电池的可用容量都明显衰减。kCT的值可以通过查表得到。
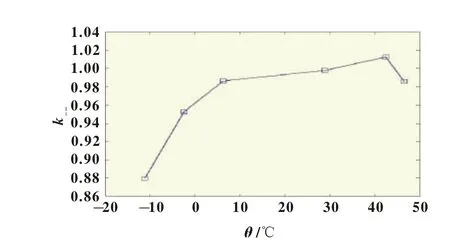
图2 温度对锂电池可用容量的影响
(2)老化的影响
电池的老化程度一般用循环工作次数来表征。锂电池的循环工作次数一般在2 000次以上,本文参考万向电动汽车锂电池的实验数据处理老化的影响,在锂电池使用初期kCL记为1。
1.4 EKF估计过程
上文已经提到的卡尔曼滤波器适用于线性系统的状态估算。但实际应用中很多系统都是非线性的,如果要用卡尔曼滤波器估算非线性系统的状态,就必须对非线性系统进行改造。卡尔曼滤波器用于线性化改造了的非线性系统就形成了扩展卡尔曼滤波器(EKF)。
EKF每一次迭代运算都要作预测和修正两件事。初始化之后,和KF很相似,通过非线性系统预测系统的当前状态。误差协方差和增益的计算方法也类似于KF,用线性化了的Ak代替A,用线性化了的Ck代替C。具体算法如下:
线性化处理后,Ak、Ck为:
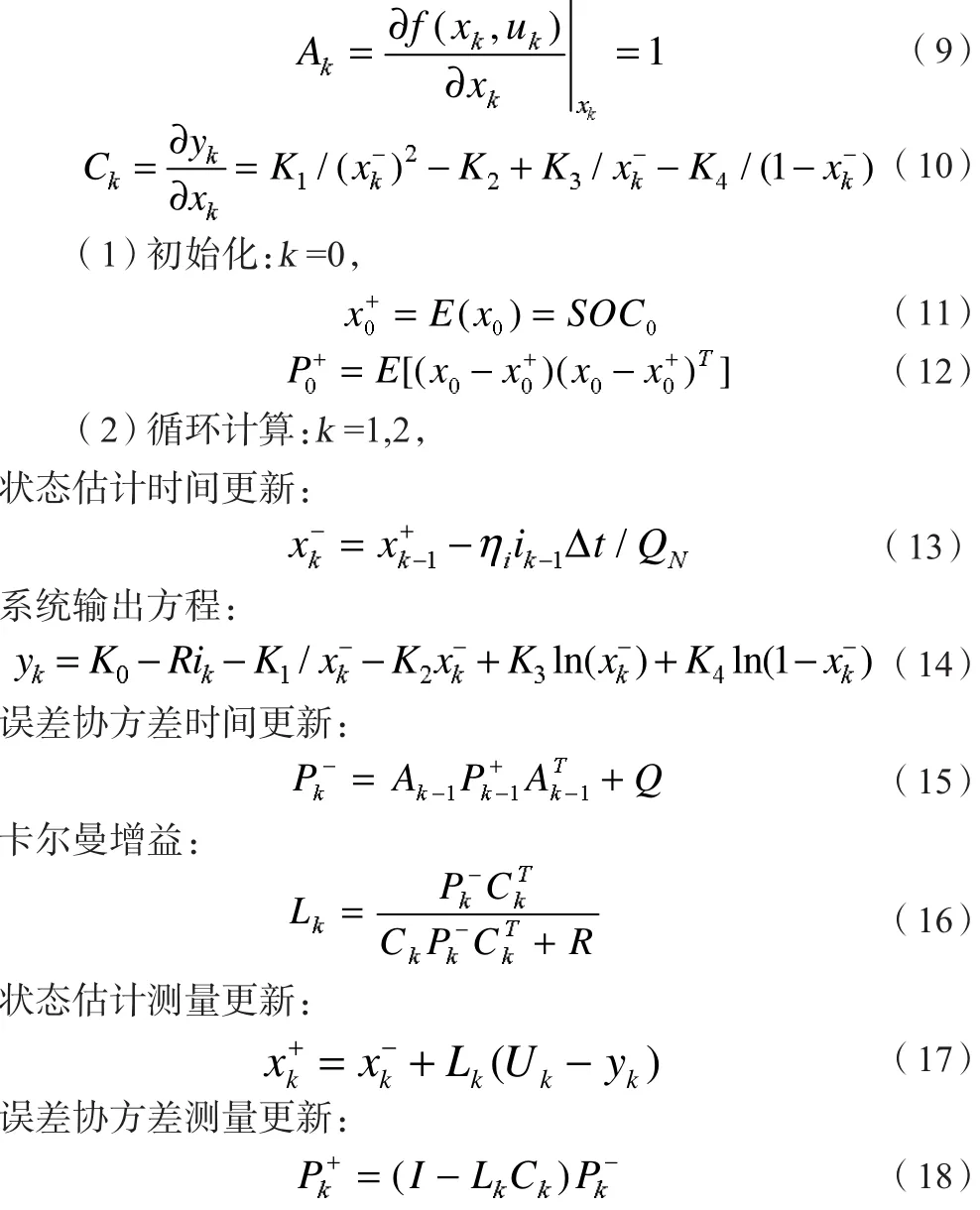
式中:P为卡尔曼滤波误差协方差矩阵;L为卡尔曼滤波增益矩阵;Uk为采样时刻k(k=1,2, )的电池负载电压;I为单位矩阵;Q和R分别为wk和vk的协方差。
式(13)~(18)就是EKF估算过程,计算时五个等式不断循环,从而使得估算的状态也不断更新,在更新过程中逐渐使得估计值逼近真实值。
2 算法验证及分析
为验证上述方法的实时性和准确性,本文采用联邦城市行驶工况(FUDS)实验方法对电池组进行充放电实验。FUDS(federalurban driving schedule)是典型的电动汽车行驶工况,时间全长1 372 s,本文所用设备为BT2000,共完成了8.75个循环,历时12 000 s。采用万向电动汽车有限公司的聚合物锂离子电池组为实验对象,电池组由100节锂电池串联而成,额定容量为60 Ah,额定电压为420 V。实验前用C/3向电池组净充入47.88 Ah电量(对应SOC值为0.798),采样时间间隔为1 s,工况实验后用C/3放出36.66 Ah(对应SOC为0.187)。图3和图4分别为电池组工作时采集到的电压、电流曲线。图5是不同估算方法下SOC值曲线。
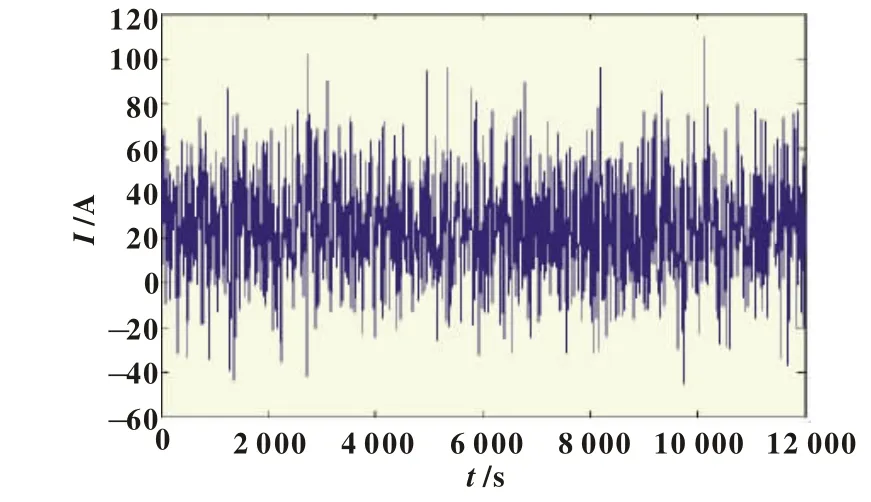
图3 F DD S工况下电池工作电流曲线
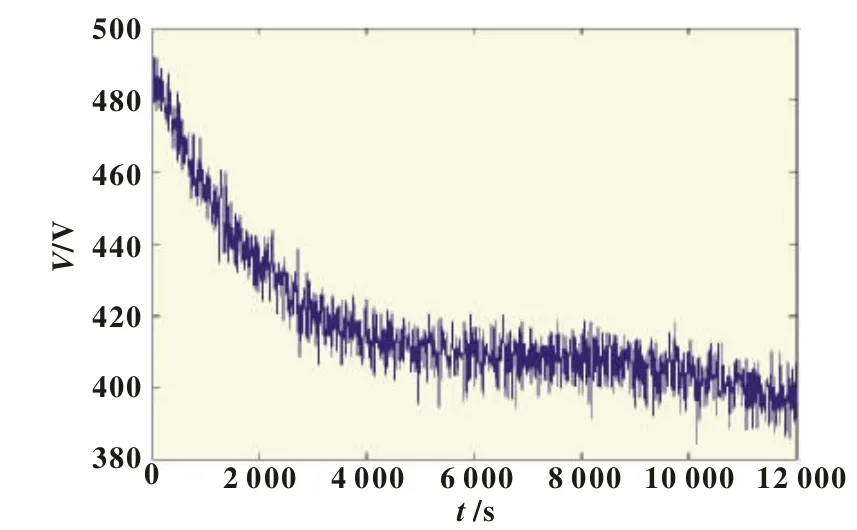
图4 F DD S工况下电池工作电压曲线
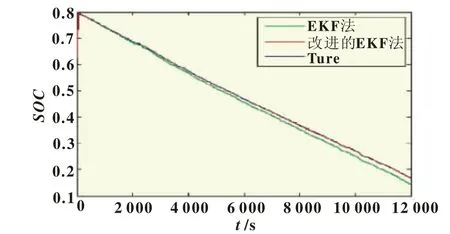
图5 EKF滤波估计、改进的EKF滤波估计与真实曲线
实验表明,传统的EKF法计算的SOC误差较大,这是因为电池在工作过程中会发生极化现象。经过对电池模型进行极化作用的修正后大大消除了极化现象的影响,提高了EKF法计算SOC的精度。在此基础上采用改进的EKF滤波算法的迭代运算,估算数值逐步逼近真实值,经过200 s的估算后,误差小于5%,满足SOC的精度要求。由此可见,通过对动力电池模型采用改进的EKF算法估算SOC,可以消除动力电池SOC的累积误差,提高了SOC值的精度,基本满足实际应用需求。
3 结论
本文采用了阶数不高却能较好体现锂电池的动静态性能,且易于工程实现的电化学复合电池模型,同时基于电池实际情况的分析,考虑了极化作用、内阻、温度和老化对SOC估计的影响,并采用了折算的库仑效率。实验表明,基于改进的EKF算法的锂动力电池SOC估计值能较好地跟踪实际值,避免了以往剩余容量估算法误差较大,跟踪滞后等缺点,是一种较好的动力电池剩余容量估算法。但EKF算法的精度依赖于电池电气模型的准确性,如何建立更加完善的电池模型,是进一步提高SOC估算精度的重点。
[1]HEHong-wen,XIONG Rui,ZHANG Xiao-wei,etal.State-of-charge estimation of the lithium-ion battery using an adaptive extended Kalman filter based on an improved Thevenin model[J].IEEE Transactionson Vehicular Technology,2011,60(4):1461-1469.
[2] 吴红杰,齐铂金,郑敏信,等.基于Kalman滤波的镍氢动力电池SOC估算方法[J].北京航空航天大学学报,2007,3(8):945-948.
[3] 齐国光,李建民,郏航,等.电动汽车电量计量技术的研究[J].清华大学学报:自然科学版,1997,37(3):46-49.
[4] 温家鹏,姜久春,文锋,等.Kalman算法在纯电动汽车SOC估算中的应用误差分析[J].汽车工程,2010,32(3):188-192.
[5] 范波,田晓辉,马建伟.基于EKF的动力锂电池SOC状态预测[J].电源技术,2010,34(8):797-799.
[6] 李秉宇,陈晓东.基于卡尔曼滤波器的蓄电池剩余容量估算法[J].电源技术,2010,34(9):931-914.
[7] 王军平,曹秉刚,陈全世.基于自适应滤波的电动汽车动力电池荷电状态估计方法[J].机械工程学报,2008,44(5):76-79.
[8] 林成涛,王军平,陈全世.电动汽车SOC估计方法原理与应用[J].电池,2004(5):376-378.
[9] 齐智,吴锋,陈实,等.利用人工神经网络预测电池SOC的研究[J].电源技术,2005,29(5):325-328.
[10] 朱元,韩晓东,田光宇.电动汽车动力电池SOC预测研究[J].电池技术,2000,24(3):153-156.
[11] 马文伟,郑建勇,尤鋆,等.应用Kalman滤波法估计光伏发电系统铅酸电池SOC[J].通信电源技术,2009,26(5):50-53.
[12] 邵海岳,钟志华,何莉萍,等.电动汽车动力电池模型及SOC预测方法[J].电池技术,2004,28(10):637-640.
Estimation of SOC based on improved EKFmethod for electric vehicle batteries
YAN Xi-lin,XU Jia-zhu,HE Jian,LANWu-sheng
(College of Electricaland Information Engineering,Hunan University,Changsha Hunan 410082,China)
The state of charge(SOC)estimation of battery pack based on traditional Kalman filter method is suitable for estimating theSOC of electric vehicle batteries where the current fluctuates drastically.However,the uncertainty due to battery model and statistical information of the system and measurement noise will result in filtering divergence.Based on the analysis of factors affecting theSOCsuch as polarization effect,coulombic efficiency, internal resistance,temperature and ageing,the expended Kalman filter method was improved.Accordingly,the accuracy of the estimate system was improved.Matlab simulation and experiments were carried out.The comparison indicates that the improved EKF method performs well when disturbance happens.
electric vehicle;state of charge;EKF method
TM 914
A
1002-087 X(2013)11-2003-04
2013-04-06
湖南省科技厅工业支撑计划项目(2011GK3125)
严喜林(1986—),男,江西省人,硕士研究生,主要研究方向为电动汽车电池管理系统。
