电机拖动系统的虚拟动态展示设计与实现
2013-07-05孙静,雷鹏
孙 静,雷 鹏
(北京航空航天大学 自动化科学与电气工程学院,北京100191)
为丰富“电力传动与控制系统”课程教学实验体系的形式和内容,本文结合教学内容和实验需求,利用Matlab 中提供的Simpowersystems 与Simulink 3D Animation 虚拟现实工具箱,研究了基于虚拟现实技术的电机拖动系统的虚拟动态展示设计与实现[1-2],并以无刷直流电动机调速系统驱动的飞机起落架收放以及具有启动制动调速控制效果的小车运动的虚拟动态展示为例,进行验证和分析。
1 虚拟动态展示设计与实现平台
我们根据当前“电力传动与控制系统”的课程教学与实验的内容和形式,搭建了基于虚拟现实技术的电机拖动系统的虚拟动态展示设计与实现仿真平台。本文引用两个应用实例来进行说明,一个是基于无刷直流电动机调速系统的飞机起落架收放的虚拟动态展示[3],另外一个是具有启动、调速和制动功能的小车运动的虚拟动态展示[4]。
在每个实例中,我们分别对其操作步骤和注意事项等进行总体介绍和说明,同时也给出所涉及到的电机调速系统以及虚拟动态描述部分的模型、参量及操作等说明。通过点击相应的按钮即可弹出这些说明文档界面,并且点击动态展示和自我设计按钮后,就转入相应的仿真模型界面。最后平台还提供了帮助文档,通过点击平台右下角的“Help”按钮来实现。
学生可以利用这个平台,结合课程的内容和个人兴趣,选择不同的实例进行操作。在阅读了相应操作和帮助文档后,便可进行相应的操作和分析。
2 虚拟动态展示实例的设计
我们下面介绍上述的两个实例的设计方法和涉及的关键性问题。
1)设计步骤
(1)基于Simpowersystems 建立电机拖动仿真模型;
(2)利用Simulink 3D Animation 以及vrbuild2绘制虚拟场景,合理安排和设计动态展示的对象;
(3)确定仿真模型的输出与对象属性的对应关系,利用逻辑关系和数学计算等搭建接口;
(4)联接调试运行。
2)需要考虑的关键性问题
(1)应用对象的选择:负荷的选择,电机及其调速系统的选择;
(2)设计与实现:调速系统的设计与实现;
(3)接口的建立:调速系统仿真模型与虚拟负载模型的接口建立。
3)关键性问题的处理
(1)负载:利用V-Realm Builder 工具,学习虚拟现实建模语言VRML,搭建三维实体,做到飞机起落架、小车的结构清晰和动态展示效果明显;
(2)电机:利用Matlab 中Simpowersystems 已有的电机模型,通过修改相应的参数来实现;
(3)调速系统:利用Simulink 中各种数学、信号等模块和Simpowersystems 中的电机模块进行搭建,其中涉及速度调节器ASR、电流调节器ACR、位置检测器PS、逻辑电路LJ、触发器GT 等关键模块;
(4)接口:通过Matlab 中的Simulink 3D Animation 中的VR Sink 模块,将调速系统转速输出进行适当变换后与需要调节的三维实体参数进行联接。
因此,当仿真模型成功建立、虚拟场景合理绘制和对应关系明了时,一个基于Simulink 3D Animation的虚拟动态场景即成功实现。
3 飞机起落架的动态展示
飞机起落架是电力作动器的典型应用,起落架的精确建模和仿真对飞机起飞着陆过程的控制律设计有着重要意义。本文通过对飞机起落架的受力情况进行详细分析,并根据起落架的一些实际物理参数分别求得起落架各杆的运动形式,建立起落架的模型并将此模型应用于仿真。
我们通过建立以无刷直流电机为核心的电机调速系统来对起落架的运动进行控制[3]。该起落架由V-Realm Builder 绘制,最终达到能展示起落架的内部结构,并能够展示其收缩和伸展的行为。如前所述,选用无刷直流电动机,由于行为比较单一且功率要求不高,故采用单速度环控制系统。
飞机起落架模型分为两部分,一部分为电机调速,一部分为起落架。
1)调速系统
如图1所示,plane1 文件为电机调速系统的仿真模型,具体的建模过程以及参数设置与计算、位置检测器设计及转速环设计等在此不进行具体介绍。
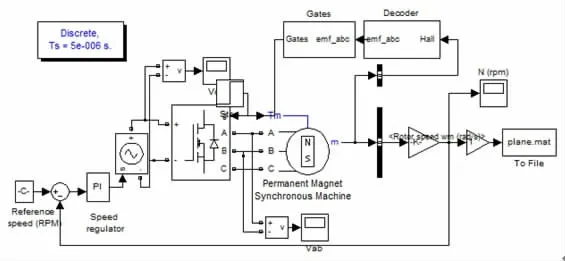
图1 飞机起落架模型的调速系统
2)起落架
为实现飞机起落架的收放运动,需将其进行简化,并明确各个部分的相互关系和动作行为。我们利用数学语言描述进行计算和分析,最终才能绘制出来,具体参见文献[3]。最后起落架的虚拟动态模型如图2所示。
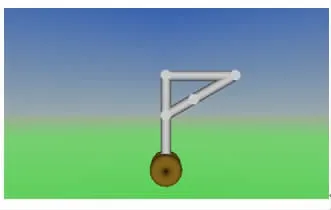
图2 起落架虚拟动态模型
3)联接实现的仿真模型
plane2 文件为调速系统与起落架虚拟动态展示实现联接的仿真模型。其中,转速由fromfile 模块从plane.mat 文件中读入,通过比例模块进行缩放,再通过一个子系统转化为各杆的位移及旋转角度,最后通过VR Sink 与起落架虚拟动态模型相联接。其联接实现的仿真模型如图3所示。

图3 联接实现的仿真模型
4)动态展示
学生可以在仿真平台上通过点击“动态展示”即可弹出plane2 的仿真模型,然后再双击VR Sink模块,执行“run”操作,即可观看到虚拟动态展示过程。我们点击vrml 浏览器右上角的运行即可看到起落架的收缩运动,如图4所示。

图4 飞机起落架运动虚拟动态展示
由上图可见,通过上述合理的分析和设计,可将电机拖动的理论知识与实际应用的控制操作相关联。由直观的动态运行效果与相应的调速系统的关联互调,有利于分析不同的电机调速系统的性能等问题。
4 小车运动
就小车运动的虚拟动态展示而言,由于运动行为简单,采用直流电机开环控制系统即可实现小车从A 点到B 点的启动、调速和制动过程。根据工艺要求,现确定电机传动方案为:正向串联电阻启动、弱磁升速、强磁降速和能耗制动等。传动方案所涉及的电动机主电路图和控制过程见专著[4]。
图5为小车控制系统仿真模型,具体模型建立和实现过程不再赘述。
图6给出了电机的转速输出,可以清楚地看到启动、提速、匀速、减速和制动等过程。

图5 小车控制系统仿真模型

图6 转速输出
图7是vrml 浏览器窗口中的小车运动模型。学生可以在仿真平台上通过点击“动态展示”即可弹出相应的“car”仿真模型,然后再双击VR Sink 模块,执行“run”操作,即可观看小车运动的虚拟动态展示过程。

图7 小车运动过程
通过应用实例的动态展示可以看出,在物理实验环境不允许的情况下,利用虚拟现实技术和数字仿真可以达到理论与实践相结合的效果,有利于学生对课程的理解和掌握。
[1] 张开如,陈荣. Matlab-Simulink 在交流调速系统仿真中的应用[J]. 济南:山东科技大学学报(自然科学版),2003,22(2):81-83
[2] 许微. 虚拟现实技术的国内外研究现状与发展[J]. 武汉:现代商贸工业,2009,No.2,279-280
[3] 王希彬,赵国荣,姜海勋,杨晓华. 某型飞机起落架运动的SIMULINK 仿真[J]. 绵阳:兵工自动化,2009,28(4):46-47
[4] 范正翘. 电力传动与自动控制系统[M]. 北京:北京航空航天大学出版社,2003
